

Біологічний турнір 2013 / маме / oftalm
.pdfАналізатор налаштований на пошук положення найбільшого контрасту зображення (максимальної яскравості). Цей пошук здійснюється переміщенням лінзи рухомої оптичної підсистеми. Положення лінзи, при якому отримується найбільший контраст, вказує рефракцію ока в даному меридіані. В процесі вимірювання щілина, обертаючись, проходить всі меридіани досліджуваного ока.
Дані, отримані в меридіанах з мінімальною і максимальною рефракцією, за допомогою ЕОМ висвічуються та роздруковуються в звичній для офтальмологів формі: «сфера – циліндр – вісь».
6.6. Аберометри і рефрактометри з просторовим розділенням по зіниці
В останні роки все більшого розповсюдження набувають прилади для дослідження просторового розподілу рефракції та аберацій оптичної системи ока (рис. 6.17). Вони надають значно більше корисної інформації в порівнянні з авторефрактометрами.
Методи
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Об’єктивний |
|
|
|
З |
|
|
|
|
|
|
|
|
|
|
З |
|
|
|
Одно- |
|
||||
|
|
|
|
використанням |
|
|
|
Адаптивної |
|
|
|
використанням |
|
|
|
променевого |
|
||||||||
|
абероско- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
датчика |
|
|
|
компенсації |
|
|
|
кутових нахилів |
|
|
|
сканування |
|
||||||||
|
пічний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
Гартмана-Шека |
|
|
|
|
|
|
|
|
|
|
пучка |
|
|
|
(ray tracing) |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 6.17 – Різновиди методів дослідження просторового розподілу заломлюючих властивостей ока
241

6.6.1. Об’єктивний абероскопічний метод
Цей метод був вперше запропонований Р. Уолшом, В. Чарманом і Х. Хоулендом в 1984 році [36]. Функціонування методу зрозуміле з рис. 6.18.
Головним елементом схеми є крос-циліндричний абероскоп. Він являє собою квадратну сітку, розташовану між двома плоскими поверхнями плоскоциліндричних лінз з оптичними силами ±5 діоптрій. Осі циліндрів взаємно перпендикулярні та орієнтовані під кутом 45° до вертикалі.
|
|
|
Фотокамера |
|
Псевдо- |
Фільтр, що |
Плоско- |
Об’єктив |
|
точкове |
поглинає УФ |
циліндричні |
||
фотокамери |
||||
джерело |
|
лінзи |
||
|
|
Фильтр, що |
Ірисова |
Лінза Сітка |
Светло- |
Око |
поглинає |
діафрагма |
|
поділювач |
пацієнта |
тепло |
|
|||
|
|
|
|
Рисунок 6.18 – Функціональна схема вимірювача, побудованого на базі абероскопічного методу
Кількість і розташування вузлів, в яких вимірюється аберація ока, повністю визначається абероскопічною сіткою (у авторів приладу така кількість вузлів становила 7×7) (рис. 6.19). Видно, що абероскопічний
242

метод може бути реалізований досить просто і компактно. Проте, його недоліком є спосіб реєстрації інформації. Модернізація методу завдяки застосуванню багатоелементних ФП (телевізійних камер) дозволяє усунути цей недолік.
а |
б |
Рисунок 6.19 – Вигляд абероскопічної сітки (а) та
їїзображення на сітківці ока (б)
6.6.2.Метод з використанням датчика Гартмана-Шека
Для розв’язання задачі просторово роздільної рефрактометрії в 1994 році Дж. Ліанг, Б. Грімм, Б. Гоелз і Дж. Біл використали датчик хвильового фронту Гартмана-Шека – двомірний масив мікролінз з однаковою апертурою і задньою фокусною відстанню [35].
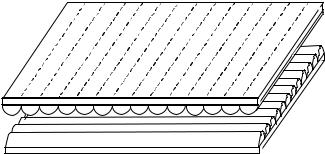
Конструктивно лінзовий растр датчика може бути виконаний з двох ідентичних прозорих пластин з рядом циліндрових лінз, розташованих під кутом 90° одна к одної (рис. 6.20). Така конфігурація датчика приводить до того, що вимірюваний хвильовий фронт розбивається растром на ряд субапертур [31]. Світло, що проходить через субапертури, фокусується в загальній задній фокальній площині масиву лінз. Очевидно, що ідеальний плоский хвильовий фронт створить у вказаній площині прямокутний масив світлових плям, причому кожна пляма буде розташована на оптичній осі
243
відповідної мікролінзи. Така картина від плоского хвильового фронту використовується при подальших вимірюваннях як відлікова.
Якщо хвильовий фронт, падаючий на датчик, є деформованим, то кожна світлова пляма в зображенні буде зміщена пропорційно локальному нахилу хвильового фронту. Отже, вимірюючи зсуви світлових плям у фокальній площині датчика, можна визначити локальні нахили (часткові похідні) хвильового фронту.
Рисунок 6.20 – Конструктивне виконання лінзового растру датчика Гартмана-Шека
На рис. 6.21 показана функціональна схема вимірювача, побудованого з використанням датчика хвильового фронту Гартмана-Шека
[32].
Лінійно поляризоване світло від He-Ne лазера проходить через акустооптичний модулятор, який задає час експозиції сітківки пацієнта. Далі пучок світла проходить через нейтральний світлофільтр і просторовий фільтр. В даному методі просторовий фільтр – це мікрооб’єктив середнього збільшення (30...50×), який фокусує пучок на малий (близько 20...30 мкм) отвір. Світло, що виходить з отвору, колімується лінзою Л1 і відбивається дзеркалом, а потім поляризаційним
244
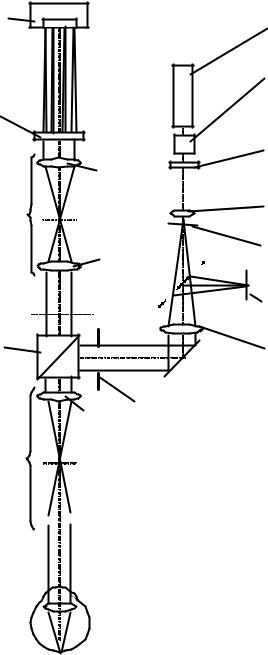
світлоподілювачем у напрямку ока пацієнта. Лінза Л2 формує зображення вказаного отвору в площині, спряженій з сітківкою.
ПЗЗ |
R |
He-Ne лазер |
|
|
|||
|
|
||
|
|
Акустооптичний |
|
Датчик Гартмана- |
|
модулятор |
|
|
|
||
Шека |
P |
Нейтральний |
|
|
|||
|
|
||
Система |
Л5 |
світлофільтр |
|
|
Мікрооб’єктив |
||
додаткового |
R |
||
|
|||
збільшення |
|
||
|
Просторовий |
||
|
Л4 |
||
|
фільтр |
||
|
P |
Гратка |
|
Поляризаційний |
P |
|
|
|
Л1 |
||
світлоподілювач |
|
||
|
Л2 |
Штучна зіниця |
|
|
|
||
Система |
R |
|
|
Бадаля |
|
 Л3
Л3
Pbj yys
Око 
R
Рисунок 6.21 – Функціональна схема вимірювача, побудованого по методу з використанням датчика Гартмана-Шека
245
На рис. 6.21 площини, оптично спряжені з сітківкою, позначені літерою ‘R’, а площини, спряжені з зіницею ока пацієнта – літерою ‘P’. Особливе значення в схемі набуває поляризаційний світлоподілювач. Оскільки він не пропускає поляризоване світло, відбите лінзами Л2 і Л3, а також світлові відблиски від рогівки, то на зворотному шляху через світлоподілювач пройде лише деполяризоване випромінювання від сітківки.
Лінзи Л2, Л3, Л4 і Л5 формують зображення зіниці пацієнта в площині масиву мікролінз. Кожна з мікролінз фокусує зображення ретинального точкового джерела світла в площині світлочутливих елементів ПЗЗ-камери. Таким чином, в даній схемі датчик хвильового фронту вимірює відхилення хвильового фронту, викривленого аберацією ока, щодо плоскої хвилі в площині вхідної зіниці ока. Це еквівалентно вимірюванню відхилення хвильового фронту від ідеальної сфери на вихідній зіниці.
6.6.3. Метод адаптивної компенсації
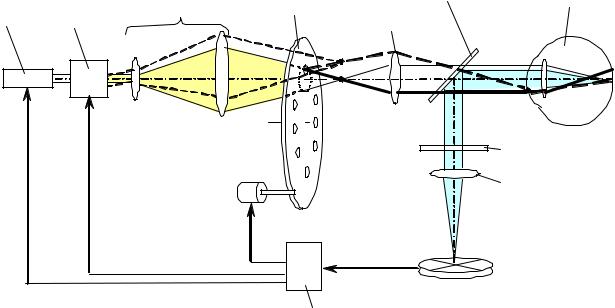
Датчик хвильового фронту Гартмана-Шека знайшов застосування також і в так званому методі адаптивної компенсації. У 1997 році Дж. Ліанг, Д. Уільямс і Д. Міллер об’єднали датчик хвильового фронту Гартмана-Шека з дзеркалом, яке може деформуватися, щоб виправити аберації ока та застосувати свій прилад для вивчення характеристик зору і ретинальних зображень. Функціональна схема такого приладу показана на рис. 6.22 [33].
Прилад містить декілька підсистем: освітлювальну підсистему, підсистему адаптивної оптики, а також підсистему для вивчення
246

контрастної чутливості ока і ретинального зображення. Остання підсистема є допоміжною і слугує для розширення функціональних можливостей приладу.
Підсистема компенсації хвильового фронту
Дзеркало, що |
P |
деформується |
|
Криптонова |
Освітлювальна |
|
|
|
лампа |
підсистема |
Підсистема вимірювання |
||
Для |
|
контрастної чутливості |
|
|
|
або отримання зображення |
|||
фокусування |
|
сітківки |
|
|
в «точку» |
|
R |
P |
R |
|
|
|||
|
|
|
Гратка або ПЗС |
|
P |
R |
R |
|
|
|
|
Підсистема вимірювання |
|
|
|
|
деформації хвильового фронту |
||
R |
Лазер |
|
|
P |
Датчик Гартмана-Шека |
|
|
|
P |
|
|
Око |
|
R |
Комп’ютер |
|
R |
ПЗЗ |
|||
|
|
|||
|
|
|
Рисунок 6.22 – Функціональна схема вимірювача, побудованого за методом адаптивної компенсації
247
Найбільш важливою в приладі є підсистема адаптивної оптики. Головними елементами в ній виступають дзеркало, форма якого може бути деформована для корекції хвильової аберації ока, і датчик хвильового фронту Гартмана-Шека. Дзеркало, що деформується, являє собою пластинку з рядом штирів, розміщених на ній у певному порядку. У дзеркала фірми Xenetics, Inc., наприклад, кількість штирів дорівнює 37, а переміщення окремого елементу цього дзеркала становить ±2 мкм, що дозволяє компенсувати зсув хвильового фронту в 8 мкм. При цьому загальний діапазон переміщень штирів розбитий на 4096 кроків (використовується 12-бітовий пристрій переміщення штирями).
Система компенсації хвильовій аберації ока реалізована у вигляді замкнутої системи із зворотним зв’язком. Згідно з методикою вимірювань, на кожному циклі проводиться по 6 вимірювань хвильового фронту, причому тривалість експозиції сітківки при кожному вимірюванні становить 0,3 секунди, а інтервал між ними – 0,4 секунди. Далі по цим вимірюванням обчислюється хвильова аберація системи «око+дзеркало» і визначається нове положення штирів. На кожному циклі штирі коректують 10 % помилок хвильового фронту (величина 10 % вибрана авторами емпірично, оскільки вона призводить до хорошої збіжності методу за критерієм мінімізації середньоквадратичного відхилення хвильової аберації).
Цикли повторюються до тих пір, поки вказане відхилення вже не зменшується. Типовий сеанс вимірювань вимагає 10...20 циклів. Таким чином, час повного сеансу може становити десятки секунд.
Істотною перевагою методів, в яких застосовується датчик Гартмана-Шека (в порівнянні з попередніми методами) є значне підвищення просторової роздільної здатності. Проте, їх недолік полягає у
248
звуженні діапазону вимірювань рефракції при збільшенні кількості елементів лінзового растру.
Для розширення діапазону вимірювань рефракції потрібно зменшувати задню фокусну відстань мікролінз і додаткове збільшення зіниці. Проте, при цьому відповідно зменшується величина поперечного збільшення поверхні сітківки, а значить, зростають похибки вимірювань поперечної аберації, оскільки вони обернено пропорційні вказаному збільшенню. Подолати цю суперечність в даному методі можна компромісним шляхом, обмежуючи величину діапазону так, щоб досягалася необхідна точність вимірювань поперечних аберацій.
Загальним недоліком вказаних методів є незмінність сітки вузлів в площини зіниці, в яких вимірюється аберація. Це робить неможливою гнучку перебудову сітки вузлів для більш детальних вимірювань в окремих зонах зіниці залежно від їх абераційних властивостей.
6.6.4. Метод з використанням кутових нахилів пучка
Інший просторово роздільний об’єктивний авторефрактометр, що базується на вимірюванні кутових нахилів пучка, був запатентований в 1990 році К. Пенні, Р. Уеббом, Дж. Тіманном і К. Томсоном [14]. Вимірювання в ньому здійснюється за допомогою замкнутого вимірювального ланцюга (див. рис. 6.23), елементами якого є оптична система, що формує лазерний пучок з відповідними геометричними параметрами і просторовим положенням, і координатно-чутливий фотоелектричний приймач (ФП), оптично спряжений з сітківкою ока пацієнта. Відмітимо, що ФП виконує роль нуль-датчика (при цьому
249
початок координат приймача співпадає з центром зображення жовтої плями).
Акусто- |
Система |
Екран (диск) с |
Напівпрозоре |
Око |
|
оптичний |
формування |
дзеркало |
паціента |
||
пучка |
отворами |
||||
Лазер дефлектор |
Л0 |
|
|||
|
|
|
|||
|
|
A |
|
||
|
|
|
|
F0 |
A′ |
|
|
|
Поляризатор |
|
Л1 |
 Квадрантний фотоприймач
Квадрантний фотоприймач
Система управління
Рисунок 6.23 – Функціональна схема вимірювача, побудованого за методом К. Пенні та ін.
У методі К. Пенні та ін. для зміни координат лазерного пучка в площині зіниці використовується екран з отворами, оптично спряжений з зіницею. Пучок потрапляє в око лише через один отвір екрану, тобто впорядковане механічне переміщення екрану призводить до зміни положення отворів, які у свою чергу змінюють положення місця перетину лазерним пучком площини зіниці. Якщо внаслідок аномальної рефракції лазерний пучок не освітлюватиме центральну зону жовтої плями, то ФП генерує відповідні електричні сигнали розбіжності. Останні
250