

§ 3. Гиперболический параболоид.
К поверхностям 2-го порядка относится также гиперболический параболоид. Эта поверхность не может быть получена применением алгоритма использующего вращение некоторой линии относительно неподвижной оси.
Для построения гиперболического параболоида используется специальная модель. Эта модель включает в себя две параболы, располагающиеся в двух взаимно перпендикулярных плоскостях.
Пусть
парабола I
располагается в плоскости
![]() и
неподвижна. Парабола II
совершает сложное движение:
и
неподвижна. Парабола II
совершает сложное движение:
▫ её
начальное положение совпадает с
плоскостью
![]() ,
причём вершина параболы совпадает с
началом координат:
,
причём вершина параболы совпадает с
началом координат:
![]() =(0,0,0);
=(0,0,0);
▫ далее
эта парабола совершает движение
параллельный перенос, причём её вершина
![]() совершает траекторию, совпадающую с
параболой I;
совершает траекторию, совпадающую с
параболой I;
▫ рассматривается два различных начальных положения параболы II: один – ветви параболы вверх, второй – ветви вниз.

Запишем
уравнения: для первой параболы I:
![]() – неизменно; для второй параболы II:
– неизменно; для второй параболы II:
![]() – начальное положение, уравнение
движения:
– начальное положение, уравнение
движения:
![]() Нетрудно видеть, что точка
Нетрудно видеть, что точка
![]() имеет координаты:
имеет координаты:
![]() .
Так как необходимо отобразить закон
движения точки
.
Так как необходимо отобразить закон
движения точки
![]() :
эта точка принадлежит параболе I,
то должны постоянно выполняться
соотношения:
:
эта точка принадлежит параболе I,
то должны постоянно выполняться
соотношения:
![]() =
=![]() и
и
![]() .
.
Из геометрических особенностей модели легко видеть, что подвижная парабола заметает некоторую поверхность. В таком случае уравнение поверхности, описываемой параболой II, имеет вид:
![]() или→
или→![]() . (1)
. (1)
Форма
получаемой поверхности зависит от
распределения знаков параметров
![]() .
Возможны два случая:
.
Возможны два случая:
1). Знаки величин p и q совпадают: параболы I и II располагаются по одну сторону от плоскости OXY. Примем: p = a2 и q = b2 . Тогда получаем уравнение известной поверхности:
![]() →
эллиптический
параболоид. (2)
→
эллиптический
параболоид. (2)
2). Знаки величин p и q различны: параболы I и II располагаются по разные стороны от плоскости OXY. Пусть p = a2 и q = -b2 . Теперь получаем уравнение поверхности:
![]() →гиперболический
параболоид. (3)
→гиперболический
параболоид. (3)
Представить геометрическую форму поверхности, определяемой уравнением (3) нетрудно, если вспомнить кинематическую модель взаимодействия двух парабол, участвующих в движении.
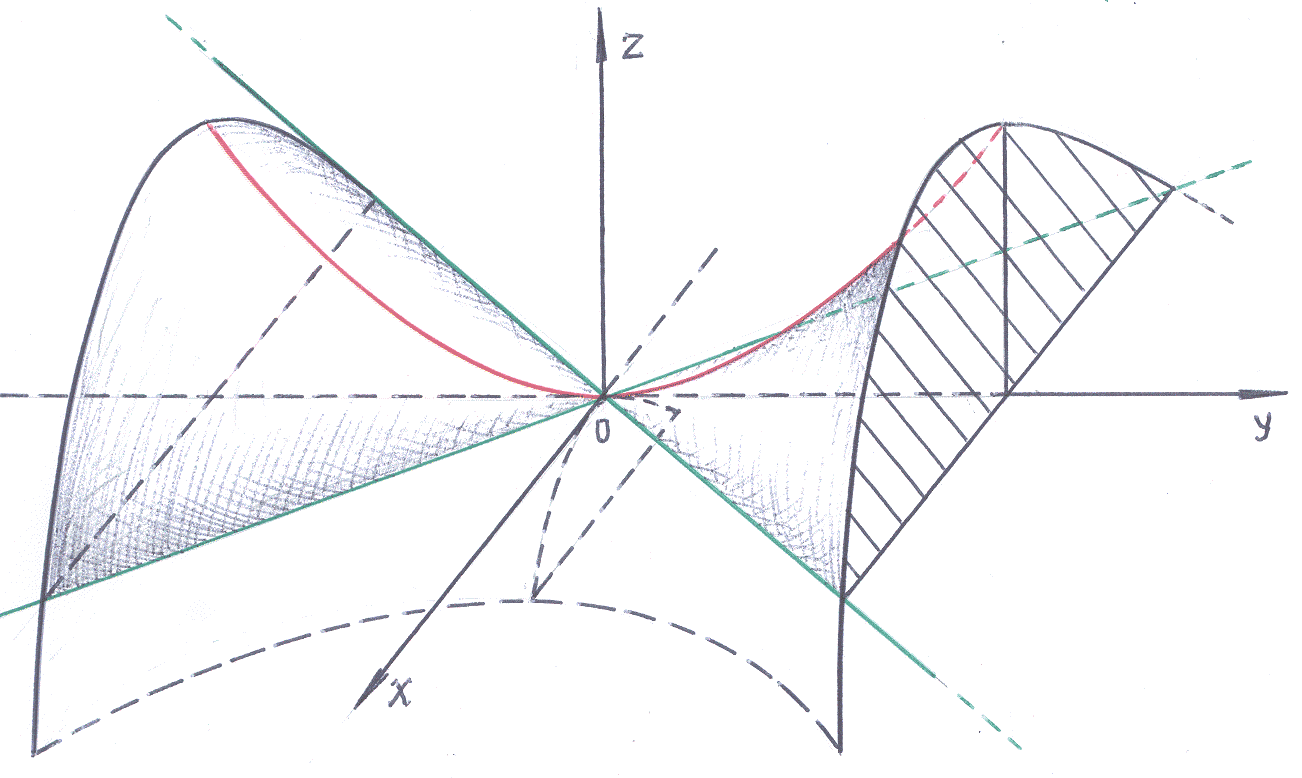
На рисунке красным цветом условно показана парабола I. Показана только окрестность поверхности у начала координат. Из-за того, что форма поверхности выразительно намекает на кавалерийское седло, окрестность эту часто называют – седло.
В физике, при исследованиях устойчивости процессов, вводят типы равновесия: устойчивое – лунка, выпуклостью вниз, неустойчивое – выпуклая вверх поверхность и промежуточное – седло. Равновесие третьего типа также относят к типу неустойчивого равновесия, причём только на красной линии (парабола I) возможно равновесие.
§ 4. Цилиндрические поверхности.
При рассмотрении поверхностей вращения мы определили простейший цилиндрическую поверхность – цилиндр вращения, то есть круговой цилиндр.
В элементарной геометрии цилиндр определён по аналогии с общим определением призмы. Оно достаточно сложное:
▫ пусть
имеем в пространстве плоский многоугольник
![]() – обозначим как
– обозначим как
![]() ,
и с ним совпадает многоугольник
,
и с ним совпадает многоугольник
![]() – обозначим как
– обозначим как
![]() ;
;
▫ применим
к многоугольнику
![]() движение параллельный перенос: точки
движение параллельный перенос: точки
![]() перемещаются по траекториям, параллельным
заданному направлению
перемещаются по траекториям, параллельным
заданному направлению
![]() ;
;
▫ если
остановить перенос многоугольника
![]() ,
то его плоскость
,
то его плоскость
![]() параллельна плоскости
параллельна плоскости
![]() ;
;
▫ поверхностью
призмы называют: совокупность
многоугольников
![]() ,
,![]() – основания
призмы, а также параллелограммов
– основания
призмы, а также параллелограммов
![]() ,
,
![]() ,...
– боковая
поверхность
призмы.
,...
– боковая
поверхность
призмы.
В оспользуемся
элементарным определением призмы для
построения более общего определения
призмы и её поверхности, а именно, будем
различать:
оспользуемся
элементарным определением призмы для
построения более общего определения
призмы и её поверхности, а именно, будем
различать:
▫ неограниченная
призма – это многогранное тело,
ограниченное рёбрами
![]() ,
,![]() ,...
и плоскостями между этими рёбрами;
,...
и плоскостями между этими рёбрами;
▫ ограниченная
призма – это многогранное тело,
ограниченное рёбрами
![]() ,
,![]() ,...
и параллелограммами
,...
и параллелограммами
![]() ,
,
![]() ,...;
боковая поверхность этой призмы –
совокупность параллелограммов
,...;
боковая поверхность этой призмы –
совокупность параллелограммов
![]() ,
,
![]() ,...;
основания призмы – совокупность
многоугольников
,...;
основания призмы – совокупность
многоугольников
![]() ,
,![]() .
.
Пусть
имеем неограниченную призму:
![]() ,
,![]() ,...
Пересечём эту призму произвольной
плоскостью
,...
Пересечём эту призму произвольной
плоскостью
![]() .
В сечении получим многоугольник
.
В сечении получим многоугольник
![]() .
Пересечём эту же призму другой плоскостью
.
Пересечём эту же призму другой плоскостью
![]() .
В сечении получим многоугольник
.
В сечении получим многоугольник
![]() .
В общем случае считаем, что плоскость
.
В общем случае считаем, что плоскость
![]() не параллельна плоскости
не параллельна плоскости
![]() .
Это значит, призма построена не
параллельным переносом многоугольника
.
Это значит, призма построена не
параллельным переносом многоугольника
![]() .
.
Предложенное построение призмы включает не только прямые и наклонные призмы, но и любые усечённые.
В
аналитической геометрии цилиндрические
поверхности будем понимать настолько
обобщённо, что неограниченный цилиндр
включает неограниченную призму как
частный случай: стоит лишь предположить,
что многоугольник можно заменять
произвольной линией, не обязательно
замкнутой – направляющая
цилиндра. Направление
![]() называют образующей
цилиндра.
называют образующей
цилиндра.
Из всего сказанного следует: для определения цилиндрической поверхности необходимо задать линию-направляющую и направление образующей.
Цилиндрические поверхности получают на основе плоских кривых 2-го порядка, служащих направляющими для образующих.
На начальном этапе изучения цилиндрических поверхностей примем упрощающие допущения:
▫ пусть направляющая цилиндрической поверхности всегда располагается в одной из координатных плоскостей;
▫ направление
образующей
![]() совпадает с одной из осей координат, то
есть перпендикулярна плоскости, в
которой определена направляющая.
совпадает с одной из осей координат, то
есть перпендикулярна плоскости, в
которой определена направляющая.
Принятые
ограничения не приводят к потере
общности, так как остаётся возможность
за счёт выбора сечений плоскостями
![]() и
и
![]() строить произвольные геометрические
фигуры: прямые, наклонные, усечённые
цилиндры.
строить произвольные геометрические
фигуры: прямые, наклонные, усечённые
цилиндры.
Эллиптический цилиндр.
Пусть
в качестве направляющей цилиндра взяли
эллипс
![]() :
:
![]() ,
расположенный в координатной плоскости
,
расположенный в координатной плоскости
![]() ,
а направление образующей определяет
ось
,
а направление образующей определяет
ось
![]() .
В этом случае уравнение цилиндра – это
сама линия
.
В этом случае уравнение цилиндра – это
сама линия
![]() :
эллиптический цилиндр.
:
эллиптический цилиндр.

Гиперболический цилиндр.
Пусть
в качестве направляющей цилиндра взяли
гиперболу
![]() :
:
![]() ,
расположенную в координатной плоскости
,
расположенную в координатной плоскости
![]() ,
а направление образующей определяет
ось
,
а направление образующей определяет
ось
![]() .
В этом случае уравнение цилиндра – это
сама линия
.
В этом случае уравнение цилиндра – это
сама линия
![]() :
гиперболический цилиндр.
:
гиперболический цилиндр.
Параболический цилиндр.
Пусть
в качестве направляющей цилиндра взяли
гиперболу
![]() :
:
![]() ,
расположенную в координатной плоскости
,
расположенную в координатной плоскости
![]() ,
а направление образующей определяет
ось
,
а направление образующей определяет
ось
![]() .
В этом случае уравнение цилиндра – это
сама линия
.
В этом случае уравнение цилиндра – это
сама линия
![]() :
параболический цилиндр.
:
параболический цилиндр.

Замечание: учитывая общие правила построения уравнений цилиндрических поверхностей, а также представленные частные примеры эллиптического, гиперболического и параболического цилиндров, отметим: построение цилиндра для любой другой образующей, для принятых упрощающих условий, не должно вызвать никаких затруднений!
Рассмотрим теперь более общие условия построения уравнений цилиндрических поверхностей:
▫ направляющая
цилиндрической поверхности располагается
в произвольной плоскости пространства
![]() ;
;
▫ направление
образующей
![]() в принятой системе координат произвольно.
в принятой системе координат произвольно.
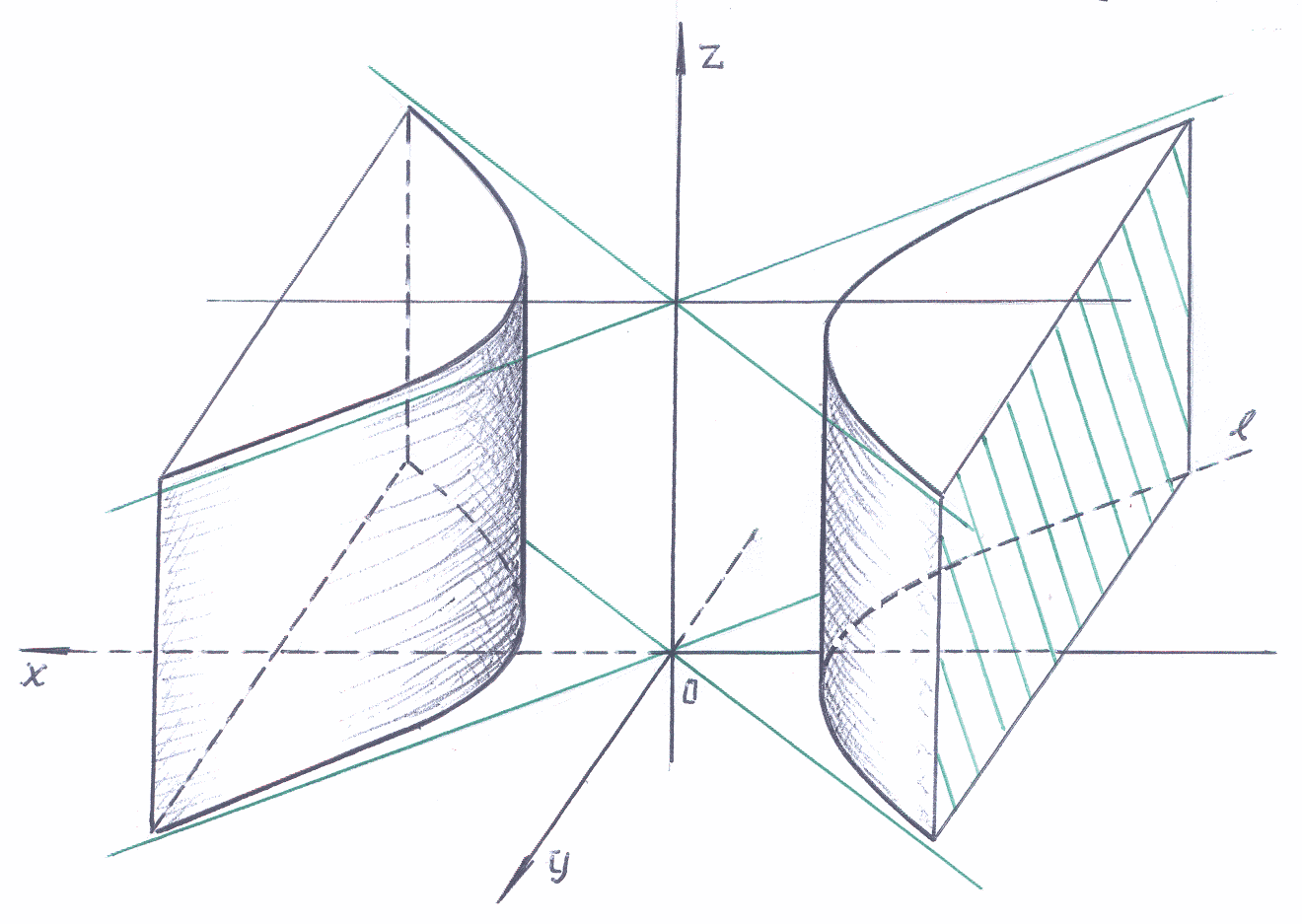
Принятые условия изобразим на рисунке.

В соответствии с рисунком будем считать:
▫ направляющая
цилиндрической поверхности
![]() располагается в произвольной плоскости
располагается в произвольной плоскости
![]() пространства
пространства
![]() ;
;
▫ система
координат
![]() получена из системы координат
получена из системы координат
![]() параллельным переносом;
параллельным переносом;
▫ расположение
направляющей
![]() в плоскости
в плоскости
![]() наиболее предпочтительное: для кривой
2-го порядка будем считать, что начало
координат
наиболее предпочтительное: для кривой
2-го порядка будем считать, что начало
координат
![]() совпадает с центром
симметрии рассматриваемой кривой;
совпадает с центром
симметрии рассматриваемой кривой;
▫ направление
образующей
![]() произвольное (может быть задано любым
из способов: вектором, прямой и др.).
произвольное (может быть задано любым
из способов: вектором, прямой и др.).
В
дальнейшем будем считать, что системы
координат
![]() и
и
![]() совпадают. Это означает, что 1-й шаг
общего алгоритма построения цилиндрических
поверхностей, отражающий параллельный
перенос:
совпадают. Это означает, что 1-й шаг
общего алгоритма построения цилиндрических
поверхностей, отражающий параллельный
перенос:
![]() →
→
![]() ,
предварительно выполнен.
,
предварительно выполнен.
Напомним, как учитывается параллельный перенос в общем случае, рассмотрев простой пример.
☺☺
Пример 6–13:
В системе координат
![]() задано уравнение направляющей цилиндра
задано уравнение направляющей цилиндра
![]() в виде:
в виде:
![]() =0.
Записать уравнение этой направляющей
в системе
=0.
Записать уравнение этой направляющей
в системе
![]() .
.
Решение:
1).
Обозначим произвольную точку
![]() :
в системе
:
в системе
![]() как
как
![]() ,
и в системе
,
и в системе
![]() как
как
![]() .
.
2). Запишем
векторное равенство:
![]() =
=![]() +
+![]() .
В координатной форме это можно записать
в виде:
.
В координатной форме это можно записать
в виде:
![]() =
=![]() +
+![]() .
Или в виде:
.
Или в виде:
![]() =
=![]() –
–![]() ,
или:
,
или:
![]() =
=![]() .
.
3). Запишем
уравнение направляющей цилиндра
![]() в системе координат
в системе координат
![]() :
:
![]() =0.
=0.
Ответ:
преобразованное уравнение направляющей:
![]() =0.
=0.
☻
Итак,
будем считать, что центр кривой,
представляющей направляющую цилиндра,
всегда располагается в начале координат
системы
![]() в плоскости
в плоскости
![]() .
.

Рис. В. Базовый рисунок при построении цилиндра.
Сделаем
ещё одно допущение, упрощающее
заключительные шаги построения
цилиндрической поверхности. Так как
применением вращения системы координат
нетрудно совместить направление оси
![]() системы координат
системы координат
![]() с нормалью плоскости
с нормалью плоскости
![]() ,
а направления осей
,
а направления осей
![]() и
и
![]() с осями симметрии направляющей
с осями симметрии направляющей
![]() ,
то будем считать, что в качестве исходного
положения направляющей
,
то будем считать, что в качестве исходного
положения направляющей
![]() имеем кривую, расположенную в плоскости
имеем кривую, расположенную в плоскости
![]() ,
причём одна её ось симметрии совпадает
с осью
,
причём одна её ось симметрии совпадает
с осью
![]() ,
а вторая с осью
,
а вторая с осью
![]() .
.
Замечание: так как выполнение операций параллельный перенос и вращение вокруг неподвижной оси операции достаточно простые, то принятые допущения не сужают применимость разрабатываемого алгоритма построения цилиндрической поверхности в самом общем случае!
Мы
видели, что при построении цилиндрической
поверхности в случае, когда направляющая
![]() располагается в плоскости
располагается в плоскости
![]() ,
а образующая параллельна оси
,
а образующая параллельна оси
![]() ,
достаточно определить только направляющую
,
достаточно определить только направляющую
![]() .
.
Так как цилиндрическая поверхность может быть однозначно определена заданием любой линии, получаемой в сечении этой поверхности произвольной плоскостью, то примем такой общий алгоритм решения задачи:
1▫.
Пусть направление образующей
![]() цилиндрической поверхности задано
вектором
цилиндрической поверхности задано
вектором
![]() .
Спроектируем направляющую
.
Спроектируем направляющую
![]() ,
заданную уравнением:
,
заданную уравнением:
![]() =0,
на плоскость, перпендикулярную направлению
образующей
=0,
на плоскость, перпендикулярную направлению
образующей
![]() ,
то есть на плоскость
,
то есть на плоскость
![]() .
В результате цилиндрическая поверхность
будет задана в системе координат
.
В результате цилиндрическая поверхность
будет задана в системе координат
![]() уравнением:
уравнением:
![]() =0.
=0.
2▫.
Применим вращение системы координат
![]() вокруг оси
вокруг оси
![]() на угол
на угол
![]() :
смысл угла
:
смысл угла
![]() вполне понятен из рисунка. В результате
вращения система координат
вполне понятен из рисунка. В результате
вращения система координат
![]() совместится с системой
совместится с системой
![]() ,
а уравнение конической поверхности
преобразуется в уравнение:
,
а уравнение конической поверхности
преобразуется в уравнение:
![]() =0.
=0.
3▫.
Применим вращение системы координат
![]() вокруг оси
вокруг оси
![]() на угол
на угол
![]() :
смысл угла
:
смысл угла
![]() вполне понятен из рисунка. В результате
вращения система координат
вполне понятен из рисунка. В результате
вращения система координат
![]() совместится с системой
совместится с системой
![]() ,
а уравнение конической поверхности
преобразуется в
,
а уравнение конической поверхности
преобразуется в
![]() =0.
Это и есть уравнение цилиндрической
поверхности, у которой были заданы
направляющая
=0.
Это и есть уравнение цилиндрической
поверхности, у которой были заданы
направляющая
![]() и образующая
и образующая
![]() в системе координат
в системе координат
![]() .
.
Представленный ниже пример иллюстрирует реализацию записанного алгоритма и вычислительные трудности подобных задач.
☺☺
Пример 6–14:
В системе координат
![]() задано уравнение направляющей цилиндра
задано уравнение направляющей цилиндра
![]() в виде:
в виде:
![]() =9.
Составить уравнение цилиндра, образующие
которого параллельны вектору
=9.
Составить уравнение цилиндра, образующие
которого параллельны вектору
![]() =(2,–3,4).
=(2,–3,4).
Р ешение:
ешение:
1).
Спроектируем направляющую цилиндра на
плоскость, перпендикулярную
![]() .
Известно, что такое преобразование
заданную окружность превращает в эллипс,
осями которого будут: большая
.
Известно, что такое преобразование
заданную окружность превращает в эллипс,
осями которого будут: большая
![]() =9,
а малая
=9,
а малая
![]() =
=![]() .
.
Этот
рисунок иллюстрирует проектирование
окружности, заданной в плоскости
![]() на координатную плоскость
на координатную плоскость
![]() .
.
2).
Результатом проектирования окружности
является эллипс:
![]() =1,
или
=1,
или
![]() .
В нашем случае это:
.
В нашем случае это:
![]() ,
где
,
где
![]() =
=![]() =
=![]() .
.
3 ).
Итак, уравнение цилиндрической поверхности
в системе координат
).
Итак, уравнение цилиндрической поверхности
в системе координат
![]() получено. Так как по условию задачи мы
должны иметь уравнение этого цилиндра
в системе координат
получено. Так как по условию задачи мы
должны иметь уравнение этого цилиндра
в системе координат
![]() ,
то остаётся применить преобразование
координат, переводящее систему координат
,
то остаётся применить преобразование
координат, переводящее систему координат
![]() в систему координат
в систему координат
![]() ,
заодно и уравнение цилиндра:
,
заодно и уравнение цилиндра:
![]() в уравнение, выраженное через переменные
в уравнение, выраженное через переменные
![]() .
.
4). Воспользуемся базовым рисунком, и запишем все необходимые для решения задачи тригонометрические значения:
![]() =
=![]() =
=![]() ,
,![]() =
=![]() =
=![]() ,
,![]() =
=![]() =
=![]() .
.
5). Запишем
формулы преобразования координат при
переходе от системы
![]() к системе
к системе
![]() :
:
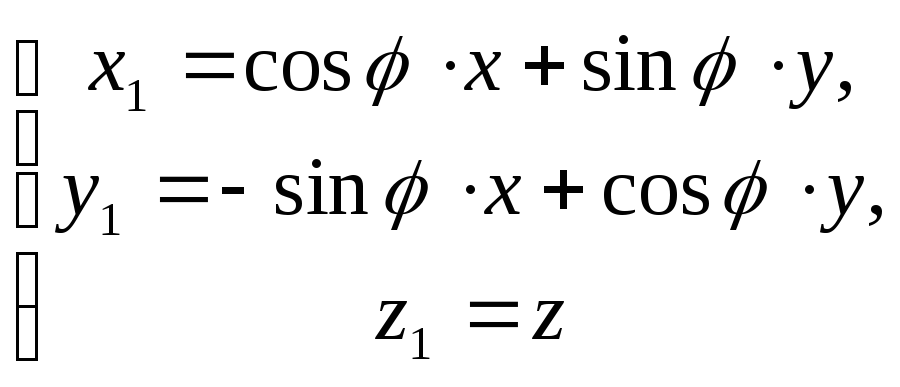 (В)
(В)
6). Запишем
формулы преобразования координат при
переходе от системы
![]() к системе
к системе
![]() :
:
 (С)
(С)
7).
Подставляя переменные
![]() из системы (В) в систему (С), а также
учитывая значения используемых
тригонометрических функций, запишем:
из системы (В) в систему (С), а также
учитывая значения используемых
тригонометрических функций, запишем:
![]() =
=![]() =
=![]() .
.
![]() =
=![]() =
=![]() .
.
8).
Остаётся подставить найденные значения
![]() и
и
![]() в уравнение направляющей цилиндра
в уравнение направляющей цилиндра
![]() :
:
![]() в системе координат
в системе координат
![]() .
Выполнив аккуратно
все алгебраические преобразования,
получаем уравнение конической поверхности
в системе координат
.
Выполнив аккуратно
все алгебраические преобразования,
получаем уравнение конической поверхности
в системе координат
![]() :
:
![]() =0.
=0.
Ответ:
уравнение конуса:
![]() =0.
=0.
Пример 6–15:
В системе координат
![]() задано уравнение направляющей цилиндра
задано уравнение направляющей цилиндра
![]() в виде:
в виде:
![]() =9,
=9,
![]() =1.
Составить уравнение цилиндра, образующие
которого параллельны вектору
=1.
Составить уравнение цилиндра, образующие
которого параллельны вектору
![]() =(2,–3,4).
=(2,–3,4).
Решение:
1). Нетрудно заметить, этот пример отличается от предыдущего только тем, что направляющую параллельно перенесли на 1 вверх.
2). Это
значит, что в соотношениях (В) следует
принять:
![]() =
=![]() –1.
Учитывая выражения системы (С),
скорректируем запись для переменной
–1.
Учитывая выражения системы (С),
скорректируем запись для переменной
![]() :
:
![]() =
=![]() .
.
3). Изменение легко учитывается коррекцией конечной записи уравнения для цилиндра из предыдущего примера:
![]() =0,
=0,
или ![]() =0,
=0,
Ответ:
уравнение конуса:
![]() =0.
=0.
☻
Замечание: нетрудно заметить, что основная трудность при многократных преобразованиях систем координат в задачах с цилиндрическими поверхностями – этоаккуратностьивыносливостьв алгебраических марафонах: да здравствует система образования, принятая в нашей многострадальной стране!