

5.9. Задания для самостоятельной работы по главе 5
5.1. Доказать, что скалярное произведение двух любых векторов
![]()
евклидова пространства тогда и только тогда выражается равенством
![]() ,
,
когда базис, в котором взяты координаты, является ортонормированным.
5.2. Проверить, что векторы системы ортогональны, и дополнить их до ортогонального базиса.
![]()
5.3. Найти векторы, дополняющие систему векторов до ортонормированного базиса
![]()
5.4. Построить ортогональный базис подпространства, натянутого на данную систему векторов
![]()
5.5. Найти расстояние между двумя плоскостями
![]()
где
|
|
|
|
|
|
|
|
5.6. Пользуясь неравенством Коши-Буняковского, доказать неравенство
![]()
для любых
вещественных чисел
![]() .
.
5.7. Найти длины сторон и внутренние углы треугольника, вершины которого заданы своими координатами
![]()
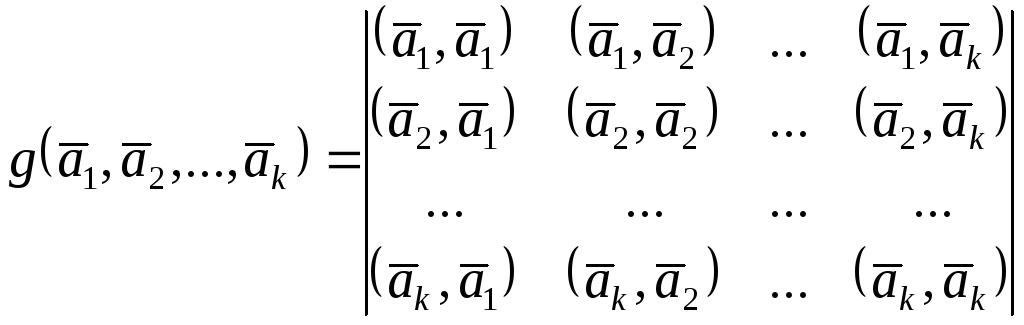
5.8. Определителем Грама векторов
![]() евклидова пространстваEnназывается определитель
евклидова пространстваEnназывается определитель
Доказать, что определитель Грама не
изменяется при применении к векторам
![]() процесса ортогонализации, т.е. если в
процессе ортогонализации векторы
процесса ортогонализации, т.е. если в
процессе ортогонализации векторы![]() перейдут в векторы
перейдут в векторы![]() ,
то
,
то
![]()
Пользуясь этим, выяснить геометрический
смысл
![]() и
и![]() ,
предполагая векторы линейно независимыми.
,
предполагая векторы линейно независимыми.
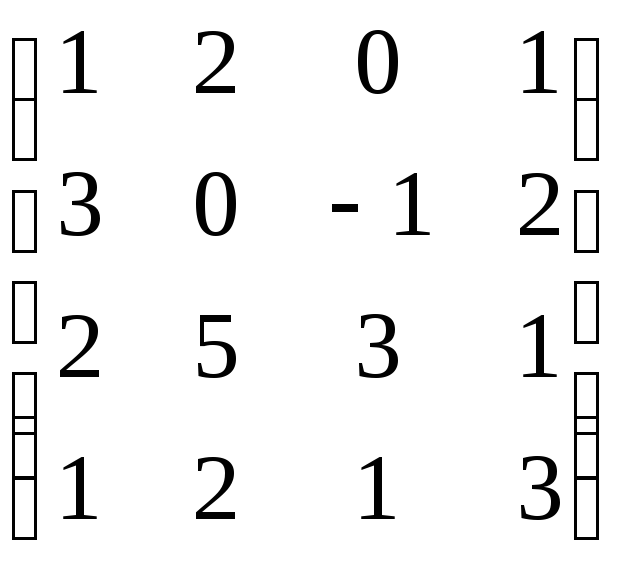
5.9. Доказать, что существует единственное
преобразование трехмерного пространства,
переводящего векторы
![]() соответственно в
соответственно в![]() ,
и найти матрицу этого преобразования
в том же базисе, в котором даны координаты
всех векторов.
,
и найти матрицу этого преобразования
в том же базисе, в котором даны координаты
всех векторов.
|
|
|
|
|
|
|
|
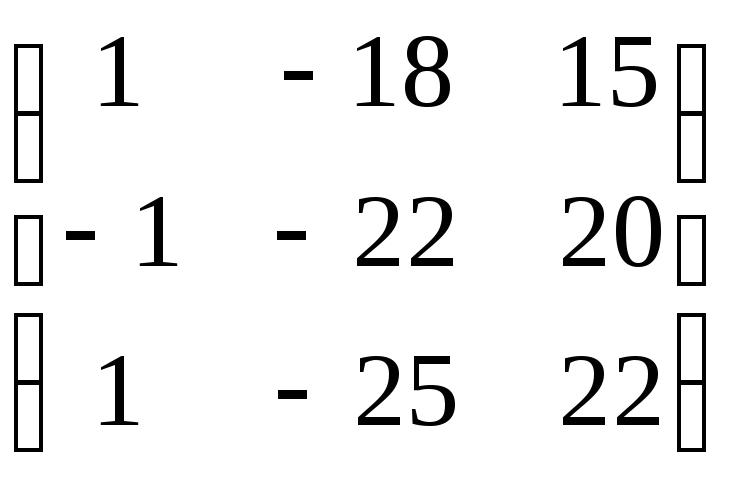
5.10. Доказать, что существует единственное
преобразование трехмерного пространства,
переводящего векторы
![]() соответственно в
соответственно в![]() ,
и найти матрицу этого преобразования
в том же базисе, в котором даны координаты
всех векторов.
,
и найти матрицу этого преобразования
в том же базисе, в котором даны координаты
всех векторов.
|
|
|
|
|
|
|
|
5.11. Линейное преобразование
![]() в базисе
в базисе![]() имеет матрицу
имеет матрицу
Найти матрицу этого же преобразования в базисе:
![]() .
.
5.12. Линейное преобразование
![]() в базисе
в базисе
|
|
|
|
имеет матрицу
Найти его матрицу в базисе
|
|
|
|
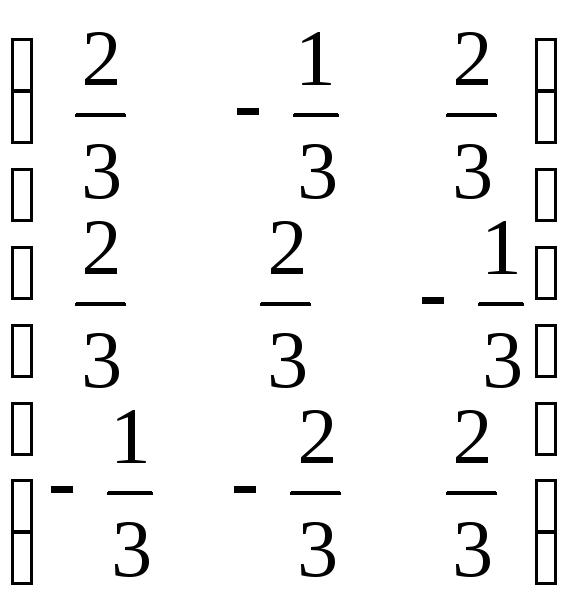
5.13. Найти канонический вид Bортогональной матрицыAи ортогональную матрицуQтакую, что![]()
5.14. Доказать, что для выполнения равенства
![]() ,
где
,
где![]() – числа и
– числа и![]() векторы, необходимо и достаточно, чтобы
было или
векторы, необходимо и достаточно, чтобы
было или![]() ,
или
,
или![]() .
.
5.15. Доказать теорему: для того чтобы две
линейно независимые системы с одинаковым
числом векторов
![]() n-мерного пространстваRnбыли эквивалентны (или порождали одно
и то же подпространство), необходимо и
достаточно, чтобы в любом базисе
соответствующие друг другу миноры
матрицА иВиз координатных
строк векторов этих систем были
пропорциональны.
n-мерного пространстваRnбыли эквивалентны (или порождали одно
и то же подпространство), необходимо и
достаточно, чтобы в любом базисе
соответствующие друг другу миноры
матрицА иВиз координатных
строк векторов этих систем были
пропорциональны.
Глава 6. Линейные операторы
6.1. Определение линейного оператора
Определение.Оператором![]() ,
отображающим векторное пространство
,
отображающим векторное пространство![]() в векторное пространство
в векторное пространство![]() ,
называется функция, которая каждому
вектору
,
называется функция, которая каждому
вектору![]() ставит в соответствие единственный
вектор
ставит в соответствие единственный
вектор![]() ,
что символически записывается в виде
,
что символически записывается в виде![]() .
Вектор
.
Вектор![]() называется образом вектора
называется образом вектора![]() при отображении
при отображении![]() ,
а вектор
,
а вектор![]() – прообразом вектора
– прообразом вектора![]() .
.
Оператор
![]() называется линейным, если:
называется линейным, если:
1)
![]() для любых
для любых![]() из
из![]() (условие аддитивности);
(условие аддитивности);
2)
![]() для любого
для любого![]() ,
где
,
где![]() – произвольное число (условие
однородности);
– произвольное число (условие
однородности);
При
![]() =0
имеем
=0
имеем![]() ,
т.е. линейный оператор преобразует
нулевой вектор в нулевой. Рассмотрим
связь между координатами вектора
,
т.е. линейный оператор преобразует
нулевой вектор в нулевой. Рассмотрим
связь между координатами вектора![]() и координатами вектора
и координатами вектора![]() .
Для этого выразим векторы
.
Для этого выразим векторы![]() и
и![]() соответственно через базис
соответственно через базис![]() пространства
пространства![]() и базис
и базис![]() пространства
пространства![]() :
:
|
|
(6.1.1) |
|
|
(6.1.2) |
Тогда имеем
|
|
(6.1.3) |
Из выражения (6.1.3) следует, что для задания
оператора
![]() достаточно задать образы базисных
векторов
достаточно задать образы базисных
векторов![]() .
.
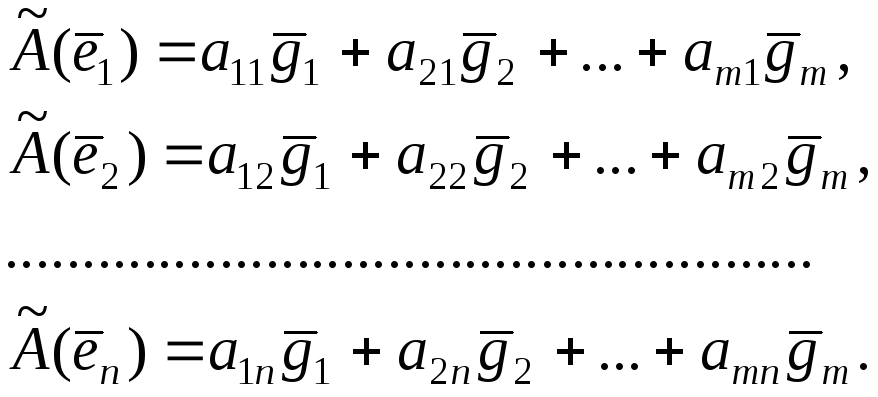
Разложим каждый вектор
![]() по базису
по базису![]() пространства
пространства![]() :
:
|
|
(6.1.4) |
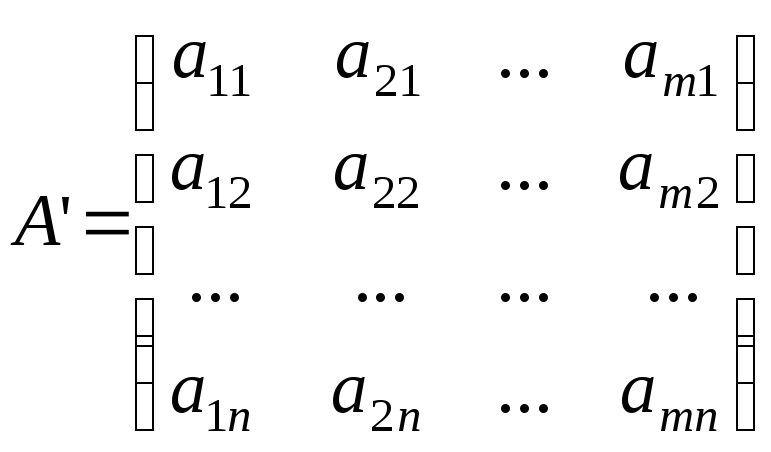
Матрица
![]() из коэффициентов разложений имеет вид:
из коэффициентов разложений имеет вид:
|
|
(6.1.5) |
Из равенства (6.1.3) и (6.1.5) получаем:
![]()
откуда в силу
единственности разложения вектора
![]() по базису
по базису![]() следует, что
следует, что
|
|
(6.1.6) |
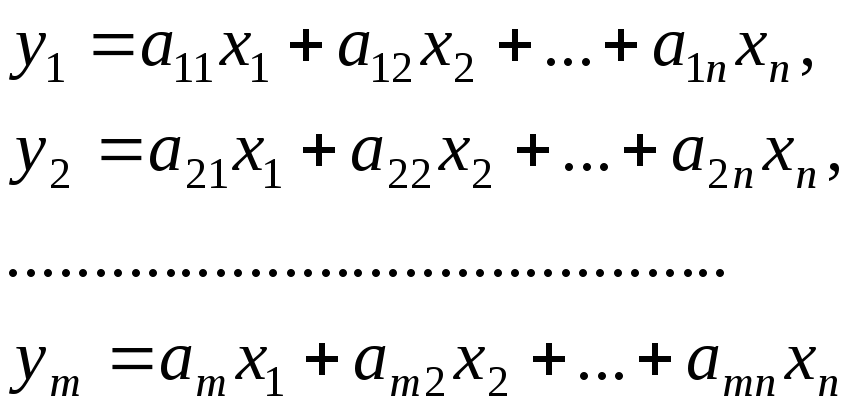
или в матричном виде
|
Y=АХ |
(6.1.7 |
где
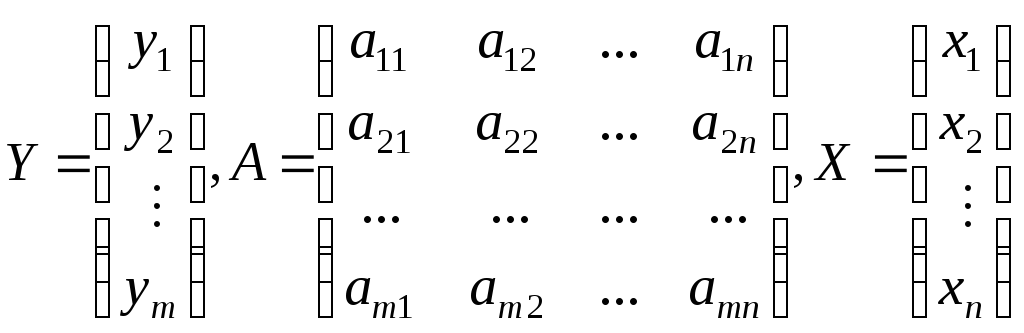
Матрица Аназывается матрицей
линейного оператора![]() .
.
Рассмотрим случай, когда оператор
![]() задается в пространстве
задается в пространстве![]() и отображает это пространство на себя.
и отображает это пространство на себя.
Тогда уравнения (6.1.4) принимают вид:

и матрицей
оператора
![]() является квадратная матрица
является квадратная матрица![]() .
.
Формулы (6.1.6) принимают вид:
Отсюда следует, что всякому линейному
оператору
![]() в пространстве
в пространстве![]() при выбранном базисе соответствует
некоторая квадратная матрица
при выбранном базисе соответствует
некоторая квадратная матрица![]() .
.
Справедливо и обратное утверждение:
всякой матрице
![]() при заданном базисе соответствует
некоторый линейный оператор
при заданном базисе соответствует
некоторый линейный оператор![]() .
.
Таким образом, можно установить взаимно
однозначное соответствие между линейными
операторами
![]() в пространстве
в пространстве![]() и матрицамиАпорядкаn.
и матрицамиАпорядкаn.
Если
![]() ,
то
,
то![]() – невырожденный оператор.
– невырожденный оператор.
Оператор
![]() называется обратным по отношению к
оператору
называется обратным по отношению к
оператору![]() ,
если:
,
если:
![]()
где
![]() – тождественный оператор, матрицей
которого является единичная матрица
порядкаn.
– тождественный оператор, матрицей
которого является единичная матрица
порядкаn.
Рассмотрим, как изменяется матрица
линейного оператора
![]() при переходе к новому базису в пространстве
при переходе к новому базису в пространстве![]() .
.
Пусть в пространстве
![]() заданы два базиса
заданы два базиса![]() и
и![]() ,
связь между которыми задается невырожденной
матрицей перехода
,
связь между которыми задается невырожденной
матрицей перехода![]() .
Тогда связь между координатами векторов
.
Тогда связь между координатами векторов![]() и
и![]() в новом и старом базисах можно выразить
в виде следующих матричных уравнений:
в новом и старом базисах можно выразить
в виде следующих матричных уравнений:
Х=ТХ*, Y=ТY*.
Учитывая, что Y=АХ, получим
ТY*=АТХ,
откуда Y*=Т-1АТХ*.
Обозначив матрицу оператора Ав новом базисе черезА*=Т-1АТ, получимY*=А*Х*.
Матрица А*называется преобразующей матрицей.
Отметим, что матрица АиА*описывают действие одного и того же
оператора![]() в разных базисах.
в разных базисах.
Покажем, что матрицы АиА*подобны, то есть|А*|=|А|. Действительно,
|A*|=|Т-1АТ|=|Т-1||A||T|=|A|.
Из выведенного соотношения следует,
что определитель матрицы Алинейного
преобразования![]() не зависит от выбора базиса в
не зависит от выбора базиса в![]() .
.
Примеры линейных операторов.
Если для каждого вектора

 ,
то оператор
,
то оператор является линейным и называется нулевым
оператором
является линейным и называется нулевым
оператором .
Так как для любого базиса
.
Так как для любого базиса
 ,
то матрицей нулевого оператора
,
то матрицей нулевого оператора является нулевая матрица.
является нулевая матрица.Если для каждого вектора

 ,
то оператор
,
то оператор является линейным и называется
тождественным оператором
является линейным и называется
тождественным оператором .
Очевидно, что матрицей тождественного
оператора является единичная матрицаЕ.
.
Очевидно, что матрицей тождественного
оператора является единичная матрицаЕ.Если для каждого вектора

 ,
то оператор
,
то оператор является линейным и называется оператором
подобия. Так как для любого базиса
является линейным и называется оператором
подобия. Так как для любого базиса
 ,
то матрица оператора подобия равна
,
то матрица оператора подобия равна .
.