

Точность в установившихся режимах
В зависимости от типа входного воздействия установившиеся режимы подразделяются на статические и динамические.
![]() ,
,![]() ,
,![]() ,
,![]() .
.
Аналогично для возмущения f(t).
Предполагается, что изменение входных воздействий относительно медленно, когда переходной составляющей можно пренебречь. Соразмерить это можно, сопоставив темп изменения входного воздействия с наибольшей постоянной времени системы.
Основным показателем качества системы в установившемся режиме является точность. Точность характеризуется величиной ошибки.
Ниже при получении величины ошибки в системе при различных входных воздействиях использованы следующие математические заготовки:

![]() ,
,
![]() .
.
1)
![]()
![]() ;
;![]() .
.
2)
![]() ;
;![]() ;
;![]() .
.
3)
![]() ;
;![]() ;
;![]() .
.
Введем обозначения:
![]() -
заданное, желаемое значение выходной
переменной,
-
заданное, желаемое значение выходной
переменной,
![]() -
реальное значение выходной переменной
системы,
-
реальное значение выходной переменной
системы,
![]() -
абсолютная ошибка в системе:
-
абсолютная ошибка в системе:
![]() .
.
![]() - относительная ошибка, может быть
вычислена в процентах.
- относительная ошибка, может быть
вычислена в процентах.
Чаще в системе вместо ошибки рассматривается рассогласование. Ошибка (рассогласование) имеет две (или более) составляющих:
![]() .
.
![]() -
ошибка воспроизведения задающего
воздействия,
-
ошибка воспроизведения задающего
воздействия,
![]() -
ошибка, создаваемая возмущением. При
приложенных к системе нескольких
возмущениях ошибка
-
ошибка, создаваемая возмущением. При
приложенных к системе нескольких
возмущениях ошибка![]() имеет несколько слагаемых.
имеет несколько слагаемых.
Значения составляющих ошибки в установившихся режимах можно определить, как ранее показано, с помощью теоремы о конечном значении:
![]() ,
,
![]() ,
,
здесь ![]() и
и![]() - изображения составляющих ошибки,
- изображения составляющих ошибки,![]() и
и![]() - изображения воздействий
- изображения воздействий![]() и
и![]() соответственно,
соответственно,
![]() и
и![]() - передаточные функции ошибки
слежения и от возмущения.
- передаточные функции ошибки
слежения и от возмущения.
Система, в которой постоянное внешнее возмущение создает ошибку в установившемся режиме, называется статической. Если постоянное внешнее воздействие не создает установившейся ошибки, то системаастатическаяотносительно этого воздействия.
Пример:
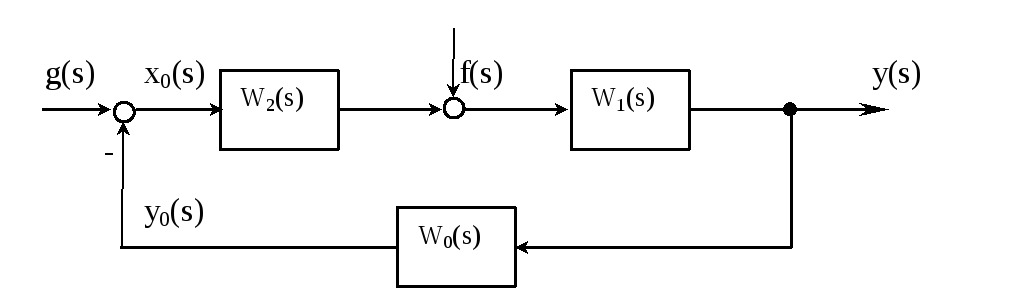
ПФ разомкнутой системы
![]() .
.
![]() ;
;![]() .
.
1) Пусть:
![]()
![]()
![]() ,
,
![]() -нормированные полиномы.
-нормированные полиномы.
Тогда
![]() ,
,![]() ,
,![]() -
передаточный коэффициент разомкнутой
системы.
-
передаточный коэффициент разомкнутой
системы.
Тогда:
![]()
![]() здесь
здесь![]() - коэффициентстатизма.
- коэффициентстатизма.
Следовательно, в данном случае система статическая, и установившаяся ошибка пропорциональна коэффициенту статизма, который тем меньше, чем больше передаточный коэффициент Кразомкнутой системы. Итак, одна из мер уменьшения ошибки - увеличение коэффициента усиления К. Но с увеличениемКухудшаются показатели качества переходных процессов системы, и приКбольше граничного значения система оказывается неустойчивой. Это ограничение часто не позволяет снизить ошибку до требуемой величины. Нужны кардинальные меры. В качестве их могут рассматриваться введение астатизма или компенсация возмущений.
Введение астатизма.
Пусть
 .
.
Тогда
![]()
![]() ;
;![]() ;
;![]() .
.
Система астатическая относительно
задающего воздействия вследствие того,
что на участке с передаточной функцией
![]() имеется последовательно включенное
интегрирующее звено.
имеется последовательно включенное
интегрирующее звено.
3) Пусть
![]()
![]()
![]()
![]() .
.
Тогда
![]()
![]() ;
;![]() ;
;![]() .
.
Система астатическая относительно
задающего воздействия и возмущения,
так как на участке с передаточной
функцией
![]() имеется интегрирующее звено.
имеется интегрирующее звено.
Итак, при наличии интегрирующего звена
в прямой цепи система с жесткой обратной
связью является астатической относительно
задающего воздействия. Статизм по
заданию устранен! Если интегрирующее
звено расположено вне участка
![]() ,
то статизм по возмущению равен нулю. В
том случае, если интегрирующее звено
расположено внутри участка
,
то статизм по возмущению равен нулю. В
том случае, если интегрирующее звено
расположено внутри участка![]() ,
то имеет место статизм по возмущению
(ошибка).
,
то имеет место статизм по возмущению
(ошибка).
Для динамических установившихся режимов
в статических системах ошибка стремится
к бесконечности. Введение астатизма
ограничивает установившуюся динамическую
ошибку. Пусть к астатической системе
приложено линейно изменяющееся задающее
воздействие: ![]() .
При этом создается установившаяся
ошибка
.
При этом создается установившаяся
ошибка![]() ,
где
,
где![]() -
передаточный коэффициент разомкнутой
системы, называемый в этом случаедобротностью по скорости. Добротность
системы по скорости характеризует
отношение скорости заданного
установившегося движения к величине
установившейся ошибки.
-
передаточный коэффициент разомкнутой
системы, называемый в этом случаедобротностью по скорости. Добротность
системы по скорости характеризует
отношение скорости заданного
установившегося движения к величине
установившейся ошибки.
Аналогично для системы с астатизмом
второго порядка (имеется два интегрирующих
звена, соединенных последовательно). В
такой системе можно говорить о добротности
системы по ускорению, как отношении
ускорения заданного установившегося
движения к величине установившейся
ошибки. То есть то при приложенном
входном воздействии с постоянным
ускорением создается установившаяся
ошибка
![]() , где
, где![]() -
передаточный коэффициент усиления
разомкнутой системы, называемыйдобротностью по ускорению.
-
передаточный коэффициент усиления
разомкнутой системы, называемыйдобротностью по ускорению.
В том случае, если входное
воздействие изменяется по гармоническому
закону![]() , то установившаяся ошибка в линейной
системе также будет гармонической
, то установившаяся ошибка в линейной
системе также будет гармонической![]()
![]() .
.
Значение
![]() определяется с помощью частотной
передаточной функции
определяется с помощью частотной
передаточной функции![]() для ошибки
для ошибки![]() .
.
Этой формулой можно пользоваться при произвольном задающем воздействии, разлагаемом в гармонический ряд.
Компенсация возмущенийпроизводится для одного, максимум двух главных возмущений. Основывается на четвертой форме инвариантности.
С целью компенсации влияния возмущения вводится специальное устройство. Сами возмущения прямо или косвенно измеряются с помощью различного рода преобразователей неэлектрических величин.
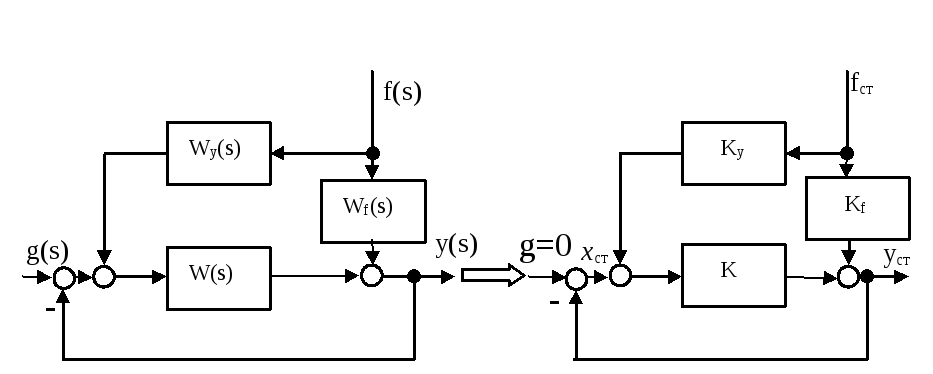 Если
в рассматриваемом примере потребовать
равенства нулю статической ошибки от
возмущения
Если
в рассматриваемом примере потребовать
равенства нулю статической ошибки от
возмущения
![]() ,
,
тогда коэффициент усиления корректирующего устройства определится как:
![]() .
.