

Glava_1
.pdfПетля 2
III
Петля 1
|
|
(B |
p |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
II |
|
|
|
|
|
|
|
7 |
|
6 |
|
5 |
4 |
Петля 3 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2' |
|
|
1' |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
(3 |
p |
) |
|
|
|
|
|
|
I |
|||
3' |
|
|
|
|
|
|
|||
|
|
|
|
|
6' |
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4' |
|
|
|
5' |
|
|
|
|
11 |
|
|
|
|
15 |
Петля 4 |
|
|
|
12 |
|
|
|
|
|
|
|||
13 |
|
|
14 |
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
IV |
Каналы ИК 2, 7, 10, 15 - первый комплект АКНП (ПД-РД) |
|||
Каналы ИК 5, 8, 13, 16 - второй комплект АКНП (ПД-РД) |
|||
Каналы ИК 1, |
6, |
11 |
- первый комплект АКНП (ДИ) |
Каналы ИК 3, |
9, |
14 |
- второй комплект АКНП (ДИ) |
Каналы ИК 4,12 - АФП |
|||
Каналы 1', 2', 3', 4', 5', 6' - внутриреакторная СКП |
|||
Рис. 2.5.1. Функциональное распределение ионизационных камер АКНП
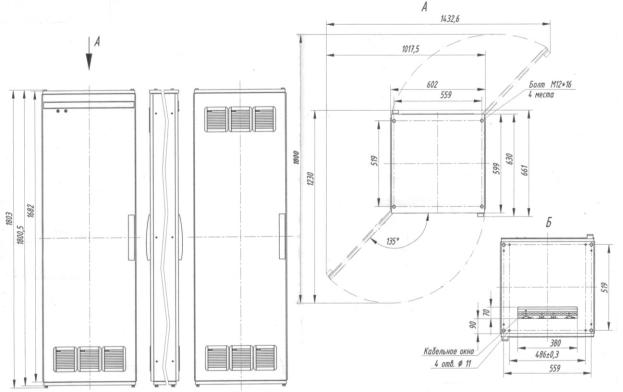
Конструктивно оборудование аппаратуры контроля нейтронного потока УНО (устройство накопления и обработки) выполняется в стационарных шкафах фирмы Schroff, допускающих одностороннее обслуживание. Габаритные и установочные размеры УНО показаны на рисунке 2.5.2.
Рис. 2.5.2 Размеры шкафа УНО
2.6. Система группового и индивидуального управления (СГИУ)
СГИУ выполняет следующие функции:
реализация заданной последовательности перемещения групп ОР СУЗ;
ручное индивидуальное и групповое управление ОР СУЗ;
поочередное движение вниз групп ОР СУЗ по команде ПЗ-1 (при снятии сигнала ПЗ-1 движение прекращается);
введение запрета на движение ОР СУЗ вверх при команде ПЗ-2 (при снятии сигнала ПЗ-2 движение разрешается);
реализация необходимых действий при поступлении команды УПЗ;
управление регулирующими группами по сигналам АРМ;
контроль положения ОР СУЗ;
представление информации о положении ОР СУЗ на БПУ и РПУ;
выдачу информации в подсистему АЗ-ПЗ, СКУД и СВБУ;
самодиагностирование;
диагностирование привода и датчика положения шагового (ДПШ).
Для реализации этих функций СГИУ выполняет следующие задачи:
перемещение ОР СУЗ вверх или вниз с рабочей скоростью;
остановку и удержание ОР СУЗ в любом положении по высоте активной зоны (с точностью 2 см);
удержание ОР СУЗ в любом положении по высоте активной зоны при недопустимом снижении токов электромагнитов путем подключения фиксирующего электромагнитов к аккумуляторной батарее (автоматический подхват) с выдачей сигнала неисправности;
остановку ОР СУЗ в крайних верхнем (КВ) и нижнем (КН) положениях по сигналам конечных выключателей;
защиту от неуправляемого движения ОР СУЗ вверх при возникновении неисправностей в аппаратуре силового управления;
снятие ОР СУЗ с упоров;
дотягивание ОР СУЗ до крайних нижнего и верхнего положения;
выравнивание положений приводов ОР СУЗ внутри рабочей группы;
одновременное перемещение вверх или вниз ОР СУЗ, собранных в группы по команде оператора или АРМ, с передачей и без передачи движения;
поочередное движение вниз групп ОР СУЗ с рабочей скоростью с передачей движения по команде ПЗ-1 по командам от исполнительной части;
введение запрета на движение ОР СУЗ вверх при поступлении команды ПЗ-2 по командам от исполнительной части подсистемы;
реализацию необходимых действий при поступлении команды УПЗ по командам от исполнительной части;
одновременное перемещение вверх или вниз выбранных оператором ОР СУЗ в режиме индивидуального управления.
По функциям, связанным с контролем положения приводов, СГИУ выполняет следующие задачи:
прием и обработку сигналов от датчика положения шагового (ДПШ) привода;
контроль положения ОР СУЗ по сигналам датчиков ДПШ по высоте активной зоны с дискретностью 20 мм, а также контроль положения ОР СУЗ по зонам;
формирование сигналов для индикации по зонам и в сантиметрах;
формирование сигналов конечных верхнего КВ и нижнего КН положений ОР
СУЗ;
формирование промежуточных сигналов о положении привода;
передачу информации по положению ОР СУЗ реактора в СКУД, подсистему АЗПЗ и СВБУ;
формирование сигнала падения ОР СУЗ;
формирование сигнала неисправности аппаратуры контроля положения привода;
формирование сигнала направления (вверх, вниз) перемещения ОР СУЗ в режиме регулирования.
По функциям, связанным с представлением информации, СГИУ выполняет следующие задачи:
на БПУ и РПУ обеспечена «грубая» индикация положения ОР СУЗ (по зонам);
на БПУ на пульте оператора имеется цифровая индикация положения любого ОР СУЗ по высоте активной зоны в сантиметрах от низа активной зоны по 191 фиксированной точке с дискретностью 2 см, и в процентах от общей длины активной зоны. При этом оператор имеет сигнализацию о выборе ОР СУЗ и его местоположении в активной зоне;
обеспечена индикация положения одновременно всех ОР СУЗ рабочей группы.
обеспечена индикация направления (вверх, вниз) приводов в режиме регулирования;
на пульте оператора на БПУ выполняется световая и звуковая сигнализация. СГИУ обеспечивает оператору БПУ:
выбор любой группы ОР СУЗ для ручного управления;
выбор одной группы ОР СУЗ из состава регулирующих (группы 9-12) в качестве рабочей для автоматического регулирования;
выбор от одного до шести ОР СУЗ из состава одной группы и их перемещения в активной зоне.
СГИУ обеспечивает следующий приоритет команд управления:
команды АЗ;
команды ПЗ (УПЗ, ПЗ-1, ПЗ-2);
команды индивидуального управления;
команды ручного группового управления;
команды автоматического управления.
Датчик положения шаговый включает в себя набор последовательно соединенных катушек. Штанга, перемещающаяся вдоль катушек, имеет набор шунтов, расположенных вдоль ее длины и перемежающихся немагнитными проставками. Для любого положения штанги в пределах ее общей зоны перемещения существует единственная (неповторяющаяся) комбинация напряжений на катушках датчика, дешифрация которой позволяет судить о положении штанги. Количество контролируемых положений штанги – 191. Перемещение штанги осуществляется в пошаговом режиме с дискретностью 20 мм.
Датчик запитан от источника переменного тока.
СГИУ по функциям диагностики приводов и ДПШ выполняет следующие задачи:
контроль связей с датчиком и приводом с выдачей сигнала для формирования обобщённого сигнала «неисправность»;
контроль и представление информации о наличии ОР СУЗ на штанге;
контроль, регистрацию с указанием местоположения ОР СУЗ:
1)пропуска шагов;
2)проскальзывания штанги с ОР СУЗ с указанием количества шагов;
3)времени шага;
контроль, регистрацию и представление информации (по запросу) о последней токовой диаграмме любого ОР СУЗ;
измерение, регистрацию времени падения каждого ОР СУЗ при срабатывании АЗ
ипри сбросах по команде оператора, включая:
1)время прохождения каждой зоны;
2)суммарное время падения;
3)время задержки от поступления команды АЗ до начала движения ОР СУЗ;
измерение времени срабатывания аварийной защиты;
подсчет и регистрацию числа шагов по каждому ОР СУЗ;
подсчет и регистрацию количества сбросов по каждому ОР СУЗ;
контроль и регистрацию наличия демпфирования при сбросе ОР СУЗ с измерением амплитуды демпфирования.
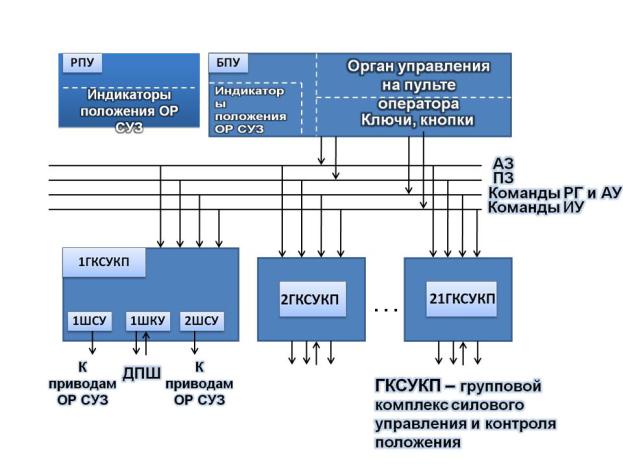
На рис. 2.6.1 приведена упрощенная схема СГИУ, основой которого является групповой комплекс силового управления и контроля положения (ГКСУКП), обслуживающий 6 - 7 приводов ОР СУЗ. Каждый такой комплекс собирается на основе двух шкафов силового управления (ШСУ) и одного шкафа контроля и управления (ШКУ). На рис. 2.6.2 приведена структурная схема одного группового комплекса силового управления и контроля положения.
Рис. 2.6.1 Упрощенная схема СГИУ
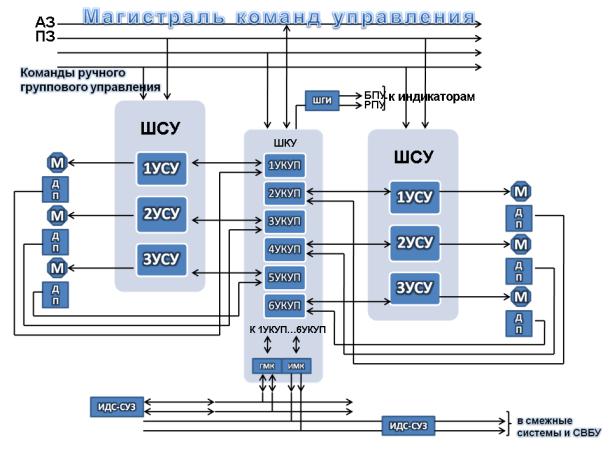
Рис. 2.6.2 Схема группового комплекса управления и контроля положения (ГКСУКП)
Основной структурной единицей системы группового и индивидуального управления является групповой комплекс силового управления и контроля положения, состоящий из:
|
шести |
устройств контроля положения и управления приводами ОР, |
|
конструктивно выполненных в виде одного шкафа контроля и управления ШКУ2; |
|||
|
шести |
устройств силового управления |
приводами ОР, конструктивно |
выполненных в виде двух шкафов силового управления ШСУ (по три устройства силового управления в каждом шкафу);
двух преобразовательных трансформаторов для двух шкафов силового управления.
Комплекс осуществляет управление шестью приводами ОР, которые могут относиться к одной группе ОР, или двумя независимыми «тройками» приводов ОР, относящимися к двум различным группам ОР.
Шкаф силового управления ШСУ предназначен для питания электромагнитов трех приводов ШЭМ-3 и состоит из трех идентичных устройств силового управления. Каждое устройство силового управления выполняет следующие функции:
перемещение ОР вверх и вниз путём формирования токов электромагнитов привода в соответствии с заданными циклограммами токов;
остановку и удержание ОР в любом положении по высоте активной зоны путём подачи на фиксирующий электромагнит привода выпрямленного тока;
сброс ОР путём обесточивания электромагнитов привода по сигналам аварийной
защиты;
удержание ОР в любом положении по высоте активной зоны при недопустимом снижении токов запирающего и фиксирующего электромагнитов;
защиту от неуправляемого движения вверх при возникновении неисправностей в аппаратуре силового управления;
формирование сигналов неисправности аппаратуры.
Устройства контроля положения органов регулирования реактора, входящие в состав шкафов контроля и управления ШКУ, обеспечивают:
электропитание датчиков положения ДПШ;
контроль положения шести ОР по сигналам датчиков положения ДПШ;
передачу кодов положения шести ОР в шкафы ШСР-У по сети стандарта Ethernet для реализации заданной последовательности перемещения штатных (фиксированных) групп ОР при автоматическом и ручном групповом управлении с передачей движения от группы к группе;
прием сигналов управления перемещением шести ОР вверх и вниз от трех серверов управления ШСР-У по сети стандарта Ethernet;
формирование трех независимых дискретных сигналов управления перемещением ОР вверх и вниз в шесть устройств силового управления, в каждом из которых формирование команды на перемещение ОР осуществляется по мажоритарному принципу «два из трех»;
формирование диагностической информации о состоянии шести приводов ШЭМ-3 и датчиков положения ДПШ;
передачу информации о положении ОР по последовательному интерфейсу RS-485
ваппаратуру АКНП;
формирование сигналов о положении шести ОР и передачу их в шкаф групповой индикации ШГИ для индикации положения групп ОР реактора по зонам на БПУ и на РПУ;
формирование сигнала несанкционированного падения ОР;
передачу информации о положении шести ОР и диагностической информации о состоянии шести каналов контроля положения и силового управления в оборудование ПТК ИДС.
Организация электропитания устройств контроля положения обеспечивает представление информации о положении групп ОР по зонам в течение 1 ч в режиме полного обесточивания энергоблока.
В состав ПТК СГИУ входит следующее оборудование:
шкафы ШКУ, предназначенные для контроля положения и управления не более чем для шести ОР, разделенных на две группы по три ОР;
шкафы силового управления ШСУ, осуществляющие управление приводами трех
ОР;
преобразовательные трансформаторы типа ТС3М-16-ОМ5, обеспечивающие электропитание шкафов ШСУ;
шкафы серверов управления ШСР-У, реализующие распределение команд управления на группы ОР и на отдельные ОР в соответствии с заданной логикой работы СГИУ и АРМ;
шкаф рабочих станций пульта оператора ШРСП;
групповые цифровые «зонные» индикаторы положения ОР типа ИП;
шкаф групповой индикации ШГИ;
шкафы промежуточных клеммников ШПК11, ШПК12, ШПК13;
рабочая двухмониторная станция на БПУ.
Оборудование ПТК СГИУ представляет собой трехканальную магистрально – модульную систему, в которой передача команд на перемещение ОР в активной зоне реактора, формируемых в соответствии с заданными алгоритмами управления и режимами работы СГИУ и АРМ, а также технологической и диагностической информации осуществляется с использованием сетевых технологий.
При построении ПТК СГИУ принята трехуровневая архитектура. На верхнем уровне – уровень серверов управления – осуществляется централизованное трехканальное формирование команд управления в соответствии с заданными алгоритмами управления и режимами работы СГИУ и АРМ. На среднем уровне – уровень концентраторов – осуществляется трехканальный контроль и управления группами ОР. На нижнем уровне системы осуществляется контроль и управления отдельными ОР при условии обработки команд управления по мажоритарному принципу «два из трех».
Шкафы серверов управления ШСР-У и шкаф рабочих станций пульта оператора ШРСП образуют верхний уровень ПТК СГИУ. Шкафы серверов управления ШСР-У образуют три независимых сегмента локальной сети Ethernet, к которым подключаются устройства нижних уровней ПТК СГИУ, образующие три независимых канала, каждый из которых включает тракты контроля и управления всеми ОР 12 штатных групп. Команды на перемещение ОР вверх или вниз в активной зоне реактора формируются шкафами ШСР-У автоматически или по заданию оператора БПУ в соответствии с заданными алгоритмами управления и режимами работы СГИУ и АРМ. Кроме того, шкафы ШСР-У осуществляют формирование и передачу технологической и диагностической информации в оборудование ПТК ИДС для регистрации и архивирования и в шкаф ШРСП для представления на мониторе оператора БПУ.
Шкаф ШРСП предназначен для реализации функций рабочих станций пульта в составе дублированных каналов интерактивного (мониторного) управления СГИУ и АРМ, а также отображения технологической и диагностической информации по этим подсистемам. В шкафу ШРСП организованы два независимых (дублирующих друг друга) канала связи с резервированной двухмониторной рабочей станцией на БПУ с одной стороны и тремя сегментами локальной сети Ethernet (сети ИУС СГИУ) с другой стороны.
Выбор режима работы СГИУ и АРМ, выбор ОР в индивидуальное управление, задание изменения уставок для АРМ с отображением текущих и заданных значений мощности реактора и давления пара в ГПК осуществляется на основном видеокадре СГИУ с помощью «виртуальных» ОДУ, представленных на мониторе оператора БПУ. Подача управляющих команд в режимах ручного группового управления и при индивидуальном управлении осуществляется с помощью органов ручного управления, размещаемых на секции СГИУ пульта оператора. После ввода и первичной обработки по заданным алгоритмам эти задания передаются серверам управления трех шкафов ШСР-У по трем сегментам локальной сети Ethernet для дальнейшей обработки по заданным алгоритмам и выработки команд на перемещение ОР в активной зоне реактора.
Устройства силового управления (УСУ) приводами ОР, входящие в состав шкафов ШСУ, обеспечивают:
перемещение ОР вверх и вниз путём формирования токов электромагнитов привода в соответствии с заданными циклограммами токов;
остановку и удержание ОР в любом положении по высоте активной зоны путём подачи на фиксирующий электромагнит привода выпрямленного тока;
сброс ОР путём обесточивания электромагнитов привода по сигналам аварийной
защиты;
удержание ОР в любом положении по высоте активной зоны при недопустимом снижении токов запирающего и фиксирующего электромагнитов;
защиту от неуправляемого движения вверх при возникновении неисправностей в аппаратуре силового управления;
формирование сигналов неисправности устройств силового управления и их выдачу сигналов в шкафы ШКУ для дальнейшей передачи по сетевым связям в шкафы ШСР-Д.
Шкаф ШГИ предназначен для приема от шкафов ШКУ: - кодов положения ОР в виде номера шага, - кодов состояния каналов контроля и управления,
- формирует по заданному алгоритму коды положения (номера зоны) 12 групп ОР - кодов, задающих цветность индикации, и передачу этой информации на
индикаторы положения групп ОР на БПУ и РПУ по дублированным интерфейсам.
Шкаф ШГИ содержит два независимых устройства формирования информации о положениях групп ОР.
Отображение на БПУ неисправностей трактов контроля и управления ОР реактора осуществляется изменением цветности индикации групповых индикаторов положения при неисправностях:
собственно аппаратуры тракта контроля и управления ОР;
датчиков положения (обрыв линий связи с катушками датчика, превышение или снижение напряжения на катушках датчика, нарушение питания датчика).
Шкафы промежуточных клеммников ШПК11 и ШПК11.1 обеспечивают связь шкафов ШСУ4 с обмотками приводов ШЭМ-3. Шкафы промежуточных клеммников ШПК12
иШПК12.1 обеспечивают связь шкафов ШКУ2 с датчиками положения ДПШ. Шкаф промежуточных клеммников ШПК13 обеспечивает прием управляющих сигналов от оборудования ИЧ АЗ-ПЗ, их размножение и передачу в оборудование СГИУ.
2.7. Информационно-диагностическая сеть СУЗ
В состав СУЗ входит программно-технический комплекс информационнодиагностической сети СУЗ (ПТК ИДС СУЗ), который предназначен для:
1.Сбора, обработки и архивирования информации по функционированию оборудования СУЗ.
2.Сбора, обработки и архивирования информации по нейтронно-физическим и технологическим параметрам РУ, сейсмическим воздействиям на РУ.
3.Регистрации в системе единого времени АСУ ТП и технологической сигнализации на табло БПУ факта и первопричин срабатывания защит.
4.Регистрации в системе единого времени АСУ ТП неисправностей оборудования СУЗ с технологической сигнализацией этих событий на табло БПУ.
5.Информационной поддержки оперативного персонала БПУ и участия в реализации функции СГИУ по индивидуальному управлению ОР СУЗ с помощью дисплейных средств.
6.Информационной поддержки персонала при диагностике неисправностей оборудования СУЗ.
ИДС СУЗ представляет собой сетевую иерархическую структуру на базе средств вычислительной техники с двумя уровнями иерархии (рис. 2.7.1). На нижнем уровне иерархии используются устройства (микроконтроллеры) программно-аппаратного контроля
идиагностики в составе:
-каналов инициирующей части АЗ, ПЗ,
-каналов АРМР,
-каналов контроля и управления СГИУ,
-каналов индикации положения ОР СУЗ на индикаторах панелей БПУ и РПУ,
-первого и второго комплектов исполнительной части АЗ, ПЗ,
-оборудования надежного электропитания СУЗ,
-оборудования силового электропитания приводов СУЗ.