

2.4.Анализ напряженного состояния в точке
2.4.1.Преобразование компонентов напряженного состояния при замене системы прямоугольных координат
Напряженное состояние в произвольной точке тела при данном выборе прямоугольной системы координат определяется шестью компонентами напряжений, действующими на трёх взаимно перпендикулярных площадках, проходящих через эту точку и параллельных координатным плоскостям.
Если же в этой точке ввести другую («новую») систему координат, то напряженное состояние будет определяться шестью «новыми» компонентами напряжений, которые должны определяться через шесть «старых».
Обозначим старую координатную систему как x, y, z , а новую – x′, y′, z′. Соответственно, компоненты напряжений в старой системе будут σx , σy , τxy и т.д., а в новой − σx′ , σy′, τx′y′ и т.д.
Пусть ориентация осей x′, y′, z′ относительно осей x, y, z задана направляющими косинусами, представленными в табл. 2.1.
В этой таблице величины l1 , m1 , n1 ,
например, определяют направляющие косинусы оси x′ относительно осей x, y, z , т.е. l1 = cos (x′, x) и т.д.
Таблица 2.1
|
x |
y |
z |
′ |
l1 |
m1 |
n1 |
x |
|||
y′ |
l1 |
m1 |
n1 |
z′ |
l1 |
m1 |
n1 |
Проекции полного напряжения на элементарной площадке, перпендикулярной к оси x′, на старые оси x, y, z можно вычислить по известным формулам:
X x′ = σxl1 + τyxm1 + τzx n1 ,
Yx′ = τxyl1 + σy m1 + τzy n1 ,
Z x′ = τxzl1 + τyz m1 + σz n1 .
Аналогично можем записать проекции полных напряжений, действующих на элементарных площадках, перпендикулярных осям y′, z′.
23
Чтобы получить проекции полных напряжений, действующих на площадках, перпендикулярных к осям x′, y′, z′, на новые оси
x′, y′, z′, воспользуемся тем, что проекция равнодействующей на
какое-либо направление равна сумме проекций её компонентов на это же направление. Так, проектируя полное напряжение, дейст-
вующее на элементарной площадке, перпендикулярной оси |
x′, |
|
на |
|||||||||||||||||||||||||||||||||||||||||||||||||
новые оси x′, |
y′, |
|
z′, |
получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
σx′ = X x′ l1 + Yx′ m1 + Z x′ n1 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
τ |
′ ′ = X |
x |
′ l |
2 |
+ Y ′ |
m |
2 |
+ Z |
x |
′ |
n |
3 |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
x y |
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
τ |
′ ′ = X |
|
′ l |
3 |
+ Y ′ |
m |
3 |
+ Z ′ |
n |
3 |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
x z |
|
|
|
x |
|
x |
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Действительно, |
|
|
|
для |
|
|
частного |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
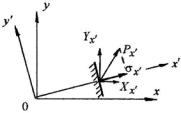
плоского случая (рис. 2.5), имеем: |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σx′ = X x′ l1 + Yx′ m1 , |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ ′ ′ = X |
|
′ l |
2 |
+ Y |
′ |
m |
2 |
. |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x y |
|
|
|
|
|
|
x |
|
|
|
|
x |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
Рис. 2.5 |
|
|
|
|
|
|
|
|
|
|
|
Подстановка |
|
|
найденных |
|
ранее |
||||||||||||||||||||||||||||||
значений |
X x′ , Yx′ , |
|
Z x′ |
в полученные соотношения приводит к |
||||||||||||||||||||||||||||||||||||||||||||||||
следующим соотношениям: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
σ |
x |
′ = σ |
x |
l 2 |
+ σ |
y |
m2 |
+ σ |
z |
n2 |
+ 2τ |
l |
1 |
m |
1 |
+ 2τ |
yz |
m |
1 |
n |
1 |
+ 2τ |
zx |
n l |
, |
|
||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
1 |
|
|
|
1 |
|
|
xy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 |
|
|
|
||||||||||||||
|
|
τ |
′ ′ = σ |
l |
1 |
l |
2 |
+σ |
m m +σ |
n n + τ |
xy |
(l m |
|
|
+ m l |
) + |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
x y |
|
|
x |
|
|
|
|
y |
|
1 |
|
2 |
|
z |
1 |
|
2 |
|
|
|
1 2 |
|
|
|
|
1 2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
+ τyz (m1n 2 + n1m2 ) + τzx (n1l 2 + l1n2 ) . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
Формулы для компонентов напряжений |
|
σ |
y |
′, |
|
|
σ |
z |
′, |
|
τ |
|
′ |
′ , |
τ |
|
′ ′ |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y z |
|
|
|
z x |
|||||
легко получить с использованием круговой замены индексов.
Отметим, что полученные соотношения отвечают формулам преобразования компонентов тензора второго ранга, симметрично-
24
го относительно главной диагонали, при замене системы прямоугольных координат. Соответственно, можно говорить о тензоре напряжений как о тензоре второго ранга, симметричном относительно главной диагонали.
2.4.2. Исследование нормальных напряжений
Интерес с точки зрения прочности представляет не полное напряжение на какой-либо площадке с нормалью n , а его составляющие σn и τn (нормальное и касательное напряжения) и, в частности, экстремальные значения этих напряжений.
Покажем, что в точке тела существуют такие три взаимно перпендикулярные площадки, на которых нормальные напряжения принимают экстремальные (стационарные) значения, а касательные напряжения равны нулю.
Рассмотрим произвольную площадку с нормалью n , имеющей направляющие косинусы l , m , n . Нормальное напряжение на этой площадке представляется в виде:
σn = σxl 2 + σym2 + σzn2 + 2τxylm + 2τyzmn + 2τzxnl .
Выписанное соотношение можно рассматривать как функцию трех переменных l , m , n , которые связаны между собой извест-
ной формулой l 2 + m2 + n2 =1. Соответственно, чтобы найти стационарные значения функции σn = σn (l , m , n), нужно решать задачу на условный экстремум.
Для решения поставленной задачи составляется вспомогательная функция
F (l, m, n, λ)= σn + λ(l 2 + m2 + n2 −1)= λ(l 2 + m2 + n2 −1)+ + σxl 2 + σy m2 + σz n2 + 2τxy l m + 2τyz m n + 2τzx n l ,
частные производные которой по переменным l , m , n приравниваются нулю:
25
∂F / ∂l = 2σxl + 2τxy m + 2τzxn + 2lλ = 0 , ∂F / ∂m = 2σym + 2τxyl + 2τyz n + 2mλ = 0 , ∂F / ∂n = 2σz n + 2τyz m + 2τzx l + 2nλ = 0 .
Полученные три уравнения вместе с условием l 2 + m2 + n2 =1 составляют полную систему уравнений для отыскания всех четырех неизвестных l , m , n и λ, определяющих стационарные значения функции F и, соответственно, нормального напряжения σn .
Представленных условий экстремума достаточно, чтобы, не решая их, сделать некоторые выводы. Перепишем уравнения в форме:
(σxl + τxy m + τzx n) / l = −λ , (σy m + τxyl + τyz n) / m = −λ , (σz n + τyz m + τzx l) / n = −λ .
Можно видеть, что числители полученных соотношений определяют составляющие полного напряжения X n , Yn , Zn на рас-
сматриваемой площадке и, таким образом, условия экстремума функции F приводятся к соотношениям
Xln = Ymn = Znn = const .
Полученные равенства показывают, что на площадке, где функция F (или нормальное напряжение σn ) имеет стационарное
значение, компоненты полного напряжения должны быть пропорциональны направляющим косинусам нормали к площадке.
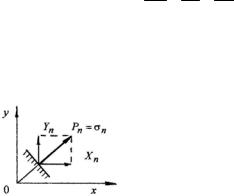
Указанная ситуация реализуется, когда полное напряжение направлено по нормали к этой площадке (рис. 2.6). Действительно, в этом случае
Рис. 2.6 |
X n = σn l , Yn = σn m X n / l =Yn / m . |
26
Но если полное напряжение направлено по нормали к площадке, то на этой площадке касательное напряжение равно нулю.
Таким образом, мы доказали, что действительно существуют такие площадки, где нормальное напряжение имеет стационарное значение и где касательное напряжение равно нулю. Эти площадки называют главными площадками, а соответствующие нормальные напряжения − главными.
Теперь остается определить, сколько может быть главных площадок и, соответственно, главных нормальных напряжений в любой точке тела.
Пусть имеем главную площадку с нормалью n и направляющими косинусами l , m , n . Величина главного (полного) напряжения на ней равна σ. Запишем проекции этого напряжения на координатные оси.
С одной стороны, эти проекции можно определить непосредственно:
X n = σl , Yn = σm , Zn = σn .
С другой стороны, эти же проекции можем записать по известным формулам:
X n = σxl + τyxm + τzx n ,
Yn = τxyl + σy m + τzy n ,
Z n = τxzl + τyz m + σz n .
Из сопоставления приведенных соотношений следует, что
(σx − σ)l + τyx m + τzx n = 0 |
, |
τxyl + (σy − σ) m + τzy n = 0 |
, |
τxzl + τyz m + (σz − σ) n = 0 .
Полученную систему уравнений можно рассматривать как систему уравнений для отыскания направлявших косинусов l , m , n площадок, на которых действуют главные нормальные напряжения. Рассматриваемые уравнения являются линейными и однород-
27
ными относительно неизвестных l , m , n , и могут дать решения, отличные от нуля, только в том случае, если определитель системы уравнений равен нулю (нулевое решение системы не рассматриваем, поскольку направляющие косинусы l , m , n связаны соотно-
шением l 2 + m2 + n2 =1). Вычисляя определитель системы и приравнивая его нулю, приходим к следующему уравнению относительно главного напряжения σ:
σ3 – ( σx + σy + σz ) σ2 + ( σxσy + σyσz + σzσx – τ2xy – τ2yz – τ2zx ) σ −
− ( σxσyσz + 2 τxyτyzτzx – σxτ2yz – σyτ2zx – σzτ2xy ) = 0 .
Полученное уравнение имеет три действительных и, в общем случае, три различных корня (соответствующее математическое доказательство имеется). Эти три корня определяют значения трех главных нормальных напряжений σ1 , σ2 , σ3 , которым соответст-
вуют три группы направляющих косинусов li , mi , ni ( i = 1, 2, 3)
для трех главных площадок. В общем случае индексы 1, 2, 3 присваиваются главным напряжениям так, чтобы выполнялись неравенства σ1 ≥ σ2 ≥ σ3 .
По определению главные нормальные напряжения так же, как и ориентация соответствующих им главных площадок, должны сохраняться в данной точке без изменения при любом преобразовании системы координат x, y, z . Следовательно, они обладают
свойством инвариантности по отношению к выбору (или повороту) осей x, y, z . Для обеспечения указанного свойства необходимо,
чтобы коэффициенты при σ в уравнении являлись инвариантами относительно ортогонального преобразования координат.
Выпишем эти коэффициенты, которые в дальнейшем будем называть инвариантами тензора напряжений:
I1σ = σx + σy + σz ,
I2σ = σxσy + σyσz + σzσx – τ2xy – τ2yz – τ2zx ,
I σ = σ σ σ + 2 τ τ τ – σ τ2 – σ τ2 – σ τ2 .
3 x y z xy yz zx x yz y zx z xy
28
Первый из них называется линейным инвариантом, второй – квадратичным и третий – кубичным.
Значения направляющих косинусов l , m , n , определяющие одну из главных площадок, находим с помощью двух уравнений из
системы и уравнения l 2 + m 2 +n 2 =1. Третье уравнение системы «пропадает» в силу равенства нулю определителя системы.
Исследования полученных значений li , mi , ni ( i = 1, 2, 3) по-
казывают, что главные площадки, соответствующие найденным главным напряжениям σi ( i = 1, 2, 3) взаимно перпендикулярны.
Ортогональность главных площадок можно показать следующим образом. Для первой площадки имеем:
σ1 l1 = σxl1 + τyx m1 + τzx n1 , σ1 m1 = τxyl1 + σy m1 + τzy n1 , σ1 n1 = τxzl1 + τyz m1 + σz n1 .
Умножим первое уравнение на l 2 , второе – на m2 , третье – на n 2 и сложим. Получим:
σ1(l1l2 + m1m2 + n1n2 )=
= σxl1l2 + σym1m2 +σzn1n2 + τxy (m1l2 + m2l1)+...
Аналогичная процедура для второй площадки, но с умножением первого уравнения на l1 , второго – на m1 , третьего – на n1 , позво-
ляет получить
σ2 (l1l2 + m1m2 + n1n2 )=
= σxl1l2 + σym1m2 + σzn1n2 + τxy (m1l2 + m2l1)+...
Теперь вычтем из уравнения, полученного для первой площадки, уравнение, полученное для второй. Будем иметь:
29