

Таблица
8-2
Разновидность
ИМ
Род
тока и частота
Уравнение
преобразования
Максимальная
чувствительность, рад/А
Минимальный
предел измерения, А
Высший
класс точности
Область
применения
Электромагнитный
Постоянный,
переменный 40 Гц—8 кГц
I
dL
2W
да. '
0.15
• 10»
10-2
0,2
Амперметры,
вольтметры
Электродинамический
То
же 40 Гц—20 кГц
1
дМ12
, , а=
и/ 0а /1/г
Cos*
0,15
• 10»
Ю-2
0,1
Амперметры,
вольтметры, ваттметры, фазометры
Ферроди-
н амн чески й
ц>
То
же 40 Гц—1.5 кГц
1
, ,
а=
W
<?а
0.3
- 10®
0,5
• 10-2
0,5
Самопишущие
и щитовые амперметры, вольтметры,
ваттметрм
Магнитоэлектрический
Постоянный
1
1,5
. 10'
10-'
0.1
Амперметры,
вольтметры, гальванометры
Индукционный
Переменный
50 Гц
ff
-^r
fill2 sin t|)
-
-
0,5
Счетчики
Примечание. В формулах для переменного тока / —действующий ток, я))— угол сдвига между токами h и /2.
нужного значения (5—20 мкН-м) достигается увеличением тока и числа витков, т. е. потребляемой мощности. Электромагнитные ИМ применяются главным образом в щитовых амперметрах.
Электродинамический ИМ вообще не содержит ферромагнитных элементов. Благодаря этому его момент Мвр = IJ^dM^lda определяется чисто геометрическими параметрами катушек и преобразование тока в момент осуществляется с очень высокой точностью. Но момент, создаваемый электродинамическим ИМ, очень мал по значению, поэтому существенно сказываются на точности преобразования все «паразитные» моменты (рис. 8-27, а). Для того чтобы их свести к минимуму, все детали ИМ выполняют из неферромагнитных материалов, а детали крепления катушек — даже из непроводящих материалов, чтобы исключить их влияние на взаимоиндуктивность. Подвижная часть крепится, как правило, на растяжках. Для защиты от внешних магнитных полей ЭД механизм закрывается экраном, который должен быть достаточно удален от катушек, чтобы не влиять на их взаимоиндуктивность. Приборы с ЭД механизмами имеют большие габариты и потребляют большую мощность. ЭД механизмы применяются в лабораторных высокочастотных приборах переменного тока.
Ферродинамические ИМ, не отличаясь по принципу действия от электродинамических, имеют совершенно другое конструктивное вы
полнение, так как в них магнитная цепь выполняется из ферромагнитного материала. Введение ферромагнетиков увеличивает погрешность преобразования токов в момент, но позволяет существенно увеличить при том же потреблении мощности сам момент и тем самым снизить погрешности от «паразитных» моментов. Ферродинамические ИМ применяются в щитовых и самопишущих приборах, где моменты трения в опорах особенно велики.
ЭД и ФД механизмы являются множительными преобразователями и могут в зависимости от схемы включения их обмоток измерять ряд электрических величин: ток, напряжение, мощность, частоту, угол сдвига между двумя напряжениями.
I
' ' I
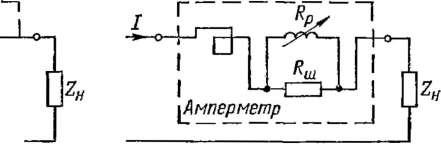
Миллиамперметр
\
ПвР
1 да Яш+Rn
_
2 дИ12- р-1
~ШГ
ГВольтметр f
I '
да RA+RP
Рис. 8-28
Некоторые схемы включения и формулы, связывающие вращающий момент с измеряемой величиной, приведены на рис. 8-28.
Магнитоэлектрический ИМ обладает рядом преимуществ по сравнению с другими ИМ, а именно: сильное магнитное поле, создаваемое постоянным магнитом, и, следовательно, относительно большие вращающие моменты, малое потребление и инвариантность к внешним магнитным полям, отсутствие успокоителя в виде специального конструктивного элемента и, следовательно, при световом отсчете почти симметричная подвижная часть, линейная зависимость между углом поворота и током и, наконец, высокая точность.
j
Ваттметр
8-6. ИНДУКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
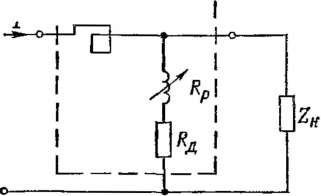
Типы индуктивных преобразователей. На рис. 8-29, а изображен наиболее распространенный преобразователь с малым воздушным зазором 6, который изменяется под действием измеряемой величины Р. Рабочее перемещение в преобразователях с переменным зазором составляет 0,01—10 мм. В этих преобразователях могут быть использованы ферритовые элементы 2 (рис. 8-29, б), выпускаемые промышленностью; для изготовления подвижного сердечника 1 используется основание такого же элемента 2, стенки которого сошлифовываются. На рис. 8-29, в изображен преобразователь с разомкнутой магнитной цепью. Он представляет собой катушку 7, внутри которой помещен стальной сердечник 2. Перемещение сердечника вызывает изменение индуктивности катушки. Этот тип преобразователя применяется для измерения значительных перемещений сердечника (10—100 мм).
s) 1
Рис.
8-29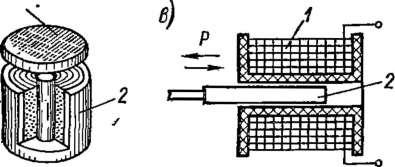
Одним из основных достоинств индуктивных преобразователей является возможность получения большой мощности преобразователя (до 1—5 В-А), что позволяет пользоваться сравнительно малочувствительным указателем на выходе измерительной цепи и регистрировать измеряемую переменную величину самописцем или вибратором осциллографа без предварительного усиления. Лишь при малогабаритных преобразователях приходится прибегать к включению усилителя.
Электрическое сопротивление индуктивного преобразователя (рис. 8-29, а), если считать, что все сопротивление утечки Rn включено параллельно зазору, выразится формулой
ЖЕ
и
Mo
s
ш
+
V(Ru+Rd\RyT?
+
Xi
Из
этой формулы видно, что Z
связано с длиной 6 воздушного
зазора зависимостью, близкой к
гиперболической. С увеличением зазора
и, следовательно, сопротивления R0
полное электрическое сопротивление
уменьшается так, как показано на рис.
8-30,
а: от Zmax
= —
\Ro
+ i<ow2I(RM
+ jXj[
при бесконечно малом зазоре до
ZmiB
=
f Ям-НХм+ЯбЧЯут"
= | Ro + faw2/(Rm 4- jXw + RyT) | при бесконечно большом зазоре. Линейный участок характеристики преобразователя с начальным зазором 60 ограничен значением Д6, равным (0,1 -г- 0,15) 60. Относительное изменение сопротивления AZ/Z из-за наличия активного сопротивления обмотки, потока утечки и магнитного сопротивления магнитопровода в 2—5 раз меньше относительного изменения зазора ее = Д6/60. Кроме того, следует обратить внимание на то, что при изменении сопротивления зазора Rб изменяется не только реактивная X = сош2 (RM + Я5 || RyJ/Z^ но и активная R = R0 + оw2XJZl составляющая сопротивления Z, и вектор сопротивления изменяется так, как показано на рис. 8-30, б.
Расширения линейного участка характеристики можно добиться, если выбрать в качестве выходной величины преобразователя не сопротивление Z, а проводимость У, которая (если пренебречь сопротивлением R) связана с изменением зазора как
Y 5=5 Z e я (^м + + ((^ут)-
Изменение проводимости при относительном изменении зазора = = М/60 составит
А = С+ЧI куг)[>+('-и6)(Лв.|лут)]
и будет почти линейно связано с изменением зазора, в особенности при RyT Уравнение можно представить как
СОW2 ! СОW2 ' сош2 *
и очевидно, что в векторной диаграмме (рис. 8-30, е) приращению проводимости ДЬ в комплексной плоскости соответствует вектор, параллельный мнимой оси и сохраняющий свое направление независимо ни от размера рабочего зазора 6, ни от частоты питающего напряжения (при изменении со одинаково изменяются обе составляющие проводимости).
Существенно уменьшить погрешности и увеличить линейный участок характеристики позволяет применение дифференциальных пре
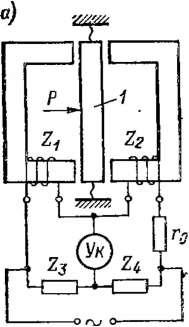
образователен (см. § 3-2). Поэтому в практике индуктивные преобразователи всегда выполняются дифференциальными. На рис. 8-31, а показана схематическая конструкция преобразователя для измерения малых перемещений, на рис. 8-31, б — для измерения больших перемещений. В том и другом преобразователе происходит перемещение сердечника 1 и при перемещении в 'направлении стрелки — увеличение сопротивления Z2 и уменьшение сопротивления Zx.
Измерительные цепи индуктивных преобразователей. Наиболее распространенной измерительной цепью является неравновесный измерительный мост, в два пле- б) ча которого включены две по
ловины дифференциального преобразователя (рис. 8-31). Как было показано выше, с измеряемой величиной линейно связана проводимость преобразователя. Поэтому оптимальным (см. § 3-2) является включение преобразователей параллельно источнику и питание моста от источника напряжения. Уравновешивание моста в начальном положении, т. е. при отсутствии входной величины (технологически трудно получить точное равенство сопротивлений двух половин преобразователя), производится по двум составляющим — изменением сопротивления нерабочего плеча Z3 или Z4 и изменением сопротивления г0, включаемого в плечо, имеющее меньшее активное сопротивление. Частота и напряжение питания моста выбираются на основании соображений, изложенных в § 8-2. Если при А6 = 0 цепь была уравновешена, то при Д6 0 через указатель потечет ток, равный 1ук = UAY, где AY — приращение электрической проводимости преобразователя.
Ток /ук сдвинут по фазе относительно напряжения питания. Угол сдвига <р = 90°, если RyK 0, и ф — 0 при RyK -> оо; при согласовании сопротивления указателя с выходным сопротивлением моста ф = 45°. Это обстоятельство необходимо учитывать при наличии в измерительной цепи фазочувствительных устройств.
8-7. ТРАНСФОРМАТОРНЫЕ (ВЗАИМОИНДУКТИВНЫЕ)
ПРЕОБРАЗОВАТЕЛИ
![]()
J1 1
t
Z; У
Ш
Рис.
8-31
ЭДС Е2 равна нулю, так как обмотки включены встречно. При смещении сердечника ЭДС Е2 определяется по формуле
Ег = Еа-Е6 = /ош> = Jpgh (Zm6 - ZMO).
\ ЛМЙ б / ^мЛб
Полагая, что ZM6 = ZH + AZM, a ZMO = ZM — AZM, можно упростить это выражение:
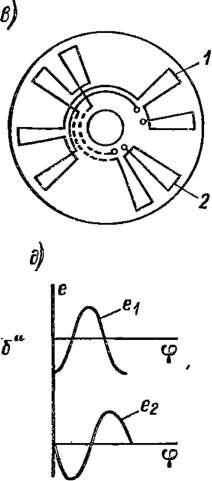
На рис. 8-32, б показан преобразователь угла поворота. Напряжение питания подводится к обмотке 1. Обмотка 2 в этом преобразовав теле выполнена в виде рамки, имеющей возможность поворачиваться в кольцевом зазоре магнитной цепи 4. При крайних положениях рамки (аг и а2) индуктированная в ней ЭДС £2 имеет максимальное значение.
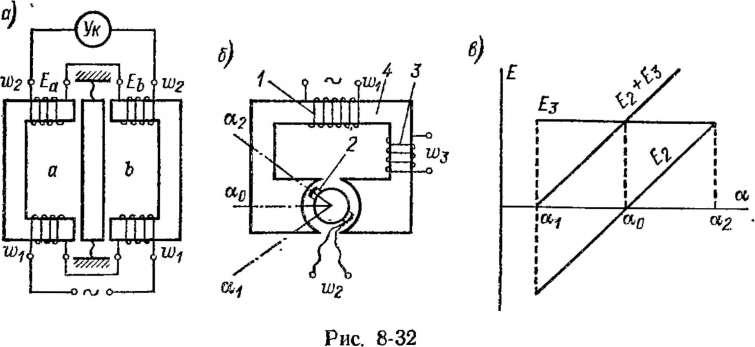
По мере поворота рамки в горизонтальное положение ЭДС Е2 линейно уменьшается до нуля (рис. 8-32, е). При переходе рамки через горизонтальное положение фаза ЭДС Е2 изменяется на 180°. В тех случаях, когда хотят получить изменение ЭДС преобразователя от нуля до максимума при повороте рамки из одного крайнего положения аг в другое а2, последовательно с рамкой включают дополнительную обмотку 3. Зависимость ЭДС Е2у Ез и (Еъ + ^з) от угла отклонения рамки приведена на рис. 8-32, в. . Преобразователи подобного типа можно применять для измерения больших угловых перемещений, и конструктивно для этих целей можно использовать измерительные механизмы ферродинамических приборов. Поэтому и сами преобразователи иногда называют ферродинамическими.
Преобразователь (рис. 8-33, а) с распределенными магнитными параметрами предназначен для измерения больших линейных перемещений и состоит из магнитопровода 4 с рабочей частью в виде двух параллельных полос, обмотки возбуждения 1 и подвижной обмотки 2. При перемещении обмотки 2 от положения 3 до положения 5 индуктированная в обмотке 2 ЭДС возрастает, причем зависимость приращения ЭДС от перемещения обмотки 2 оказывается практически линей- нои, если магнитное сопротивление участка 3—5 магиитопровода мало по сравнению с магнитным сопротивлением зазора. Преобразователи подобного типа относительно просто выполнить и с требуемой функциональной зависимостью, применив для этого профилированный магнитопровод (рис. 8-33, б). Неподвижные обмотки преобразователя соединены так, чтобы их потоки в магнитопроводе были направлены встречно. Тогда в положении 0—О ЭДС подвижной обмотки будет равна нулю. При смещении обмотки вправо или влево от нейтрали в ней наводится ЭДС, фаза которой отличается на 180°. Подробно вопросы расчета и конструирования преобразователей с распределенными параметрами и функциональных преобразователей рассмотрены в работах Л. Ф. Куликовского и его учеников.
Рис.
8-33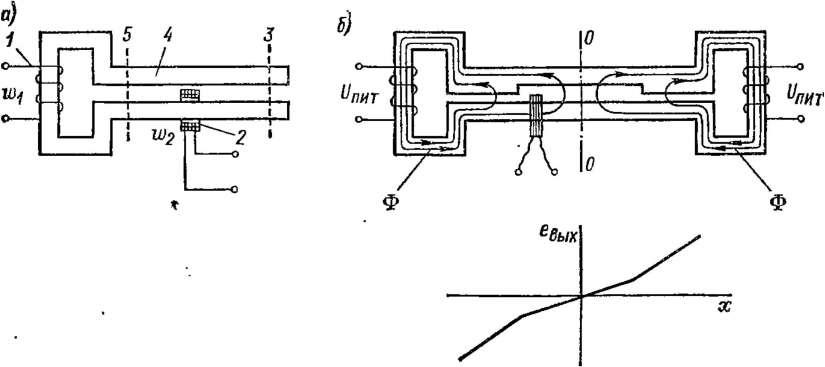
В трансформаторном преобразователе с подвижным сердечником необходимо обеспечить такой режим питания, чтобы МДС первичной обмотки, а следовательно, и ток первичной цепи не изменялись при перемещении сердечника. Для этого в одинарных преобразователях необходимо включить в первичную цепь высокоомный добавочный резистор, а в дифференциальных преобразователях — последовательно соединить первичные обмотки, сопротивления которых изменяются с обратным знаком.
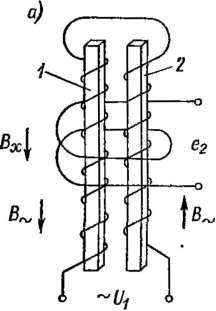
Индуктосины. Для точного измерения угла поворота применяются круговые индуктосины с печатными обмотками. Принцип действия кругового индуктосина иллюстрируется рис. 8-34. На торцевых поверхностях, обращенных друг к другу и разделенных малым воздуш- н/э1м зазором (0,1—0,2 мм) (рис. 8-34, а), ротор и статор несут печатные обмотки, имеющие вид радиального растра. Обмотка статора, к которой подводится напряжение питания высокой частоты (около 10 кГц), показана на рис. 8-34, б; обмотка ротора, в которой наводится ЭДС еВых> — на рис. 8-34, в. На рис. 8-34, г изображено сечение обмоток и магнитное поле статора, напряженность которого Иу меняется вдоль оси х. Максимальная ЭДС наводится в обмотке ротора, когда ее витки находятся под витками статора. При смещении обмотки на
угол (p,v — п/р> где р — число полюсных шагов статор ной обмотки, угол сдвига индуктированной ЭДС изменяется на 180°. Симметрия ЭДС, наводимых в обмотке ротора в положениях я и б, нарушается из-за того, что электромагнитную связь имеют не только радиалы-ю расположенные проводники обмоток, но и их лобовые части, расположенные по окружности. ЭДС, индуктируемая в лобовых частях обмоток, не зависит от углового перемещения обмоток и дает постоянное смещение. Для того чтобы это смещение исключить, применяется секционная обмотка, отдельные секции которой смещены относительно друг друга на угол nip и включены встречно, как показано на рис. 8-34, в. При таком включении ЭДС радиальных участков обмотки складываются, а ЭДС дуговых участков вычитаются.
Витки
статора
Витки
ротора в
WVW*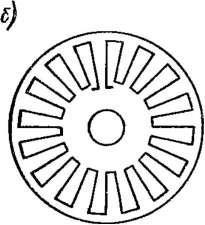
{///////////////////л
(1*00000000 fi О • О О О О ООО
Рис. 8-34
Для однозначного определения направления поворота подвижного диска в пределах одного периода повторения кривой ЭДС вторичная обмотка выполняется многофазной, в простейшем случае — двухфазной, как показано на рис. 8-34, в. Фазовые обмотки смещаются относительно друг друга на угол (2п + 1) л/(2р). Тогда при смещении ротора относительно некоторого положения, в котором ЭДС обмотки 1 считаем условно положительной, ЭДС ех и е2 в обмотках 1 и 2 вдоль угла поворота диска будут меняться так, как показано на рис. 8-34, д. Значение ег определяет угол поворота, а угол сдвига е2 относительно е1 определяет направление угла поворота. Выходной величиной индукто- сина может служить как ЭДС, индуктируемая во вторичной обмотке, так и ее фаза. Однако в том и другом случае измеряемое угловое перемещение не должно превышать полюсного деления, т. е. фдг = = ±п/р. Для того чтобы измерять большие углы поворота, индукто-
син дополняется датчиком грубого отсчета угла, который также может быть выполнен с применением печатных обмоток.
Технологически представляется достаточно сложным выполнить печатную обмотку так, как показано на рис. 8-34, е, поскольку в ней шаг между проводниками неравномерный, Для того чтобы избежать этих технологических трудностей, обе обмотки ротора и статора выполняются с равномерным шагом, но с разным числом витков. Причем эта разность подбирается таким образом, чтобы на части ротора, занимаемой одной секцией обмотки первой фазы, набегало угловое смещение между обмотками ротора и статора, равное я/(2р). Тогда ЭДС следующей секции, которая принадлежит второй фазе, будет сдвинута, относительно ЭДС первой секции на электрический угол я/2, ЭДС третьей секции, включаемая встречно с ЭДС первой, будет сдвинута относительно первой секции на угол л и т. д. Таким образом, осуществляются те же сдвиги, что и в обмотках, показанных на рис. 8-34, в. Вследствие веерного разнесения векторов ЭДС, индуктируемых в радиальных проводниках каждой секции, в пределах угла л/2 их суммарная ЭДС падает на 10%.
Полюсный шаг в существующих индуктосинах составляет 0,5— 1,5.мм, сопротивление обмоток небольшое (0,5—5 Ом), ток питания статорной обмотки 0,1—0,5 А, выходная ЭДС 5—10 мВ.
Основными источниками погрешностей индуктосинов являются неточность выполнения обмоток по углу, неплоскостность токопрово- дящих слоев ротора и статора и радиальные эксцентриситеты обмоток, вызванные несовпадением геометрических осей вращения обмоток с реальной осью вращения. Суммарная погрешность измерения углов с помощью индуктосинов составляет 3—10".
ближении
к ним проводящего тела. Как было
сказано выше, глубина проникновения
электромагнитной волны в материал
Рис.
8-35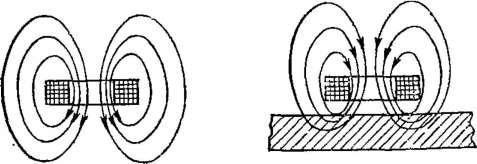
8-8. ВИХРЕТОКОВЫЕ ИНДУКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
Принцип действия вихретокового преобразователя основан на изменении индуктивности и взаимоиндуктивности катушек при при-
определяется формулой 20,05= K2/(co,uy). На низких частотах (50 Гц) для меди и алюминия значение 2а.оо составляет около 10 мм,
на высоких частотах (500 кГц) глубина проникновения уменьшается до 0,1 мм. На рис. 8-35 показано, как искажается магнитное поле катушки при приближении проводящей пластины. Присутствие вблизи витка с переменным током проводящей среды приводит к изменению его первоначального поля и электрических параметров витка, т. е.
его активного и реактивного сопротивления: активное сопротивление витка увеличивается за счет роста потерь в проводящей среде, а индуктивное сопротивление уменьшается.
Значение вносимых сопротивлений RBH и Хвк зависит при постоянной частоте питания и геометрических размерах обмотки от расстояния 6 от обмотки до пластины, электрической проводимости и толщины пластины, пока толщина не превышает величины d = 2Z0>05.
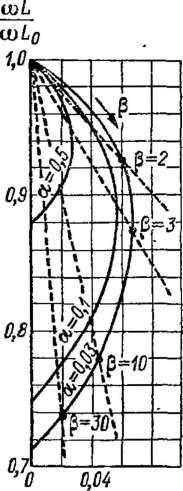
В качестве примера на рис. 8-36 приведены зависимости относительного изменения активного и индуктивного сопротивлений витка радиусом находящегося над проводящим полупространством, от а = 2SIR и Р —V2R/zq9qS.
Вихретоковые преобразователи находят самое широкое применение в области бесконтактного контроля линейных размеров тонких пластин и толщины покрытий (индукционная тол- щинометрия) и обнаружения дефектов — поверхностных царапин и трещин. Для этих целей используются накладные (рис. 8-37, а), экранные (рис. 8-37, б) и щелевые (рис. 8-37, в) датчики.
Применять вихретоковые датчики для измерения перемещения, очевидно, имеет смысл только в тех случаях, когда датчик не должен
0,08
R^
wig
Рис.
8-36
/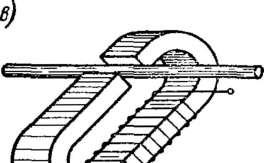
Рис. 8-37
тушкой, помещенной в магнитопровод с перемещающимся сердечником. Кроме того, вихретоковые преобразователи имеют большие погрешности, обусловленные главным образом температурными изменениями электрической проводимости проводящего тела.
8-9. МАГНИТОУПРУГИЕ ПРЕОБРАЗОВАТЕЛИ
Принцип
действия
магнитоупругих преобразователей
основан на изменении магнитной
проницаемости [л ферромагнитных тел в
зави
симости от возникающих в них механических напряжений (магнито- упругий эффект), обусловленных воздействием на ферромагнитные тела механических сил Р (растягивающие, сжимающие, изгибающие, скручивающие). Изменение магнитной проницаемости Afx/fx для различных материалов составляет 0,5—3% при изменении а на i МПа.
Типы магнитоупругих преобразователей можно разбить на две основные группы. К первой группе относятся преобразователи, в которых используются изменения магнитной проницаемости чувствительного элемента в одном направлении; магнитный поток в них направлен в большей части магнитной цепи вдоль линии действия уси-
•I
I
ТШШЪ,
у///////////,
ч
%=f(r)
V=const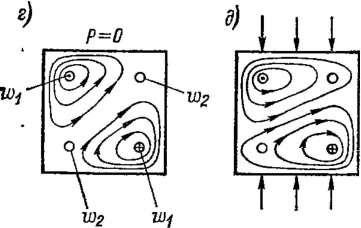
Рис.
8-38
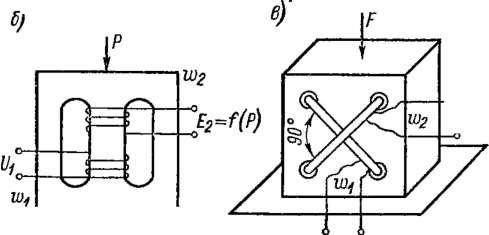
ли я. В преобразователях этой группы под действием измеряемой силы изменяется индуктивность обмотки (рис. 8-38, а) или индуктивность между обмотками (рис. 8-38, б). В первом случае реализуется цепь преобразований Р а ->- \i ZM ->- L Z, во втором —Р а ->■ \х ->- ZM М -> Е2.
Ко второй группе относятся преобразователи, в которых используется изменение магнитной проницаемости одновременно в двух взаимно перпендикулярных направлениях или, иначе говоря, магнитная анизотропия материала чувствительного элемента. В этих преобразователях магнитный поток направлен под углом 45° к линии действия измеряемого усилия (рис. 8-38, в). В ненагруженном состоянии преобразователя силовые линии первичной обмотки (рис. 8-38, г) располагаются симметрично и не сцепляются со вторичной обмоткой, в результате этого ЭДС вторичной обмотки равна нулю. После приложения усилия вследствие изменения магнитной проницаемости материала магнитные силовые линии (рис. 8-38, д) «вытягиваются» в направлении большей проницаемости, «сокращаются» в направлении
меньшей проницаемости и, сцепляясь со вторичной обмоткой, индуктируют в ней ЭДС, пропорциональную приложенному к преобразователю усилию. При изменении знака нагрузки изменяется и фаза выходной ЭДС. Из-за начальной магнитной анизотропии материала при отсутствии нагрузки уже существует некоторая ЭДС. Для ее уменьшения в датчиках из листового материала чередуют листы с взаимно перпендикулярными направлениями проката, кроме этого, специальным образом располагают отверстия, выбирая угол между обмотками; используют дополнительную обмотку или магнитный шунт.
Магиитоанизотропные
свойства проявляются и при скручивании
ферромагнитных тел. Этот эффект,
называемый эффектом Видемана, заключается
в том, что при прохождении тока через
стержень, на который воздействует
крутящий момент, в стержне, кроме
кругового магнитного потока, возникает
продольный магнитный поток, наводящий
в обмотке, намотанной на стержень
(рис. 8-39,
а)),
ЭДС, пропорциональную крутящему
моменту. При скручивании ферромагнитного
стержня, находящегося в продольном
магнитном поле (рис. 8-ЗУ, 6), в стержне
появляется винтовая составляющая
потока, которую можно считать результатом
суперпозиции продольного и кругового
потоков. Круговой поток наводит в
контуре, образованном стержнем и
подключенным к нему милливольтметром,
ЭДС, пропорциональную потоку и
зависящую от крутящего момента. Датчики,
основанные на эффекте Видемана, подробно
исследованы Е. Ф. Фурмаковым. Приводятся
следующие экспериментальные данные:
при диаметре скручиваемой проволоки
из стали марки «Э»
1,5
мм и длине активного участка 30 мм
поле возбуждения частотой 1000 Гц и
напряженностью И
= 500 А/м наводит ЭДС
е
= 20 мВ при крутящем моменте Мко
= =Ч0"2
Н-м. ■ 1
Основы расчета магнитоупругих датчиков. Характеристики маг- нитоупругого датчика определяются в первую очередь магнитоупру- гой чувствительностью Su. материала, из которого изготовлена магнитная цепь датчика. Величина — зависит от типа материала,
Рис.
8-3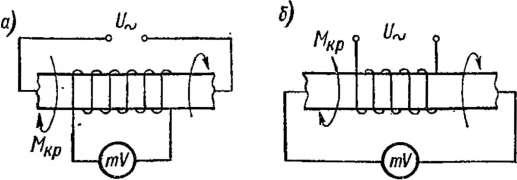
подробные характеристики магнитоупругих свойств приводятся в работах П. Б. Гинзбурга, М. И. Столбуна и Г. И. Шевченко.
Ориентировочные значения магнитоупругой чувствительности в процентах на мегапаскаль для некоторых сталей приведены ниже:
Растяжение Сжатие
„ « j/".-i 1, 13
/ уd м У 1) 14
-в) 146
д 166
Vl 1 11 178
Rr _ \f 2 V \Г2 ■ 2,0 245
^ -(0,1 4-1,5) со- 277
Еш-чГ™ hKreOMy, 281
а) 1 xl 307
/ = у J [^sin(— + cpJJ = (12-2) 344
0,8 1,2 1,6 мкм 363
СПИСОК ЛИТЕРАТУРЫ 378
Для катушек без сердечников уравнения преобразования существенно упрощаются и для основных видов преобразователей сводятся к следующим:
а) для неподвижной катушки в переменном магнитном поле (В = = Вт cos со/ , а = 0)
e^(owSBmsin(ot)
б) для катушки, вращающейся с частотой Q в постоянном магнитном поле с индукцией В0
e = QwSB0 sin Qt;
в) для контура, отдельные участки которого линейно перемещаются в магнитном поле, изменяя площадь потока сцепления с контуром,
e = §[vB] d\; i
г) для отрезка длиной I, движущегося в однородном магнитном поле со скоростью v так, что направления векторов !, В и v взаимно перпендикулярны,
e=vBL
к
Индукционные преобразователи широко применяются для измерения параметров магнитных полей, частоты вращения, параметров вибрации и сейсмических колебаний, расхода жидких веществ.
Индукционные преобразователи для измерения параметров магнитных полей. Для измерения магнитной индукции переменного магнитного поля применяются преобразователи со стационарными (неподвижными) обмотками. Функция преобразования преобразователя соответствует уравнению (8-5). Коэффициент преобразования, связывающий действующее значение индуктируемой ЭДС с амплитудным значением индукции периодически симметрично меняющегося магнитного поля, определяется выражением
Кв = Е/Вт = 4kJwS cos сф//[1 + N Qx' - 1)J,
где — коэффициент формы кривой; / — частота переменного магнитного поля.-При искаженной форме кривой обычно измеряют среднее значение индуктируемой ЭДС £ср = Е/кф.
Для измерения индукции постоянного магнитного поля могут быть использованы как преобразователи с условно стационарной обмоткой, так и преобразователи с принудительным движением обмотки. В преобразователях со стационарной обмоткой изменение магнитного потока, сцепляющегося с витками обмотки, может происходить в результате изменения самого измеряемого поля, например при измерениях магнитного поля, вызываемого включением какого-то агрегата, или в результате однократного изменения положения самого преобразователя — удаления преобразователя из магнитного поля или поворота в поле на 90 или 180°.
Выходным сигналом такого преобразователя является импульс тока или импульс ЭДС, которые возникают при изменении полного магнитного потока. Изменение потока связано с ЭДС и током как
и h
и и
где г — полное сопротивление измерительной цепи с учетом сопротивления преобразователя; Q — количество электричества.
В качестве интеграторов используются баллистический- гальванометр (при интегрировании тока) или магнитоэлектрические, фото- гальванометрические и электронные веберметры с операционными усилителями, применяемые для интегрирования ЭДС.
Индукционные преобразователи для измерения параметров магнитных полей в воздушном пространстве обычно выполняются в виде измерительных катушек различной формы, начало и конец обмотки которых находятся в одном месте, чтобы не создавались дополнительные контуры за счет подводящих проводов.
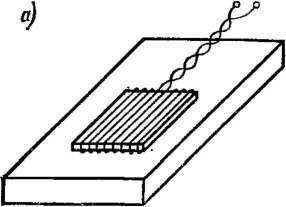
Рис. 8-43
ч
Для измерения магнитной индукции и напряженности неоднородных магнитных полей целесообразно использовать шаровые индукционные преобразователи (рис. 8-43, б). Магнитный поток, сцепляющийся с такой катушкой, равен Ф = 4этг3йуБ0/3, где В0 — индукция в центре преобразователя; г — радиус сферы; w — число витков на единицу длины оси zz\ которая должна совпадать с вектором В0.
Для измерения МДС используются индукционные преобразователи, называемые магнитными потенциалометрами, обычно выполняемые в виде равномерной обмотки на гибком изоляционном каркасе. Обмотка выполняется с четным числом слоев так, чтобы выводы находились в середине обмотки (рис. 8-43, е). Магнитный потен ци ал омет р помещается в магнитное поле таким' образом, чтобы его концы находились в точках А и В, между которыми измеряется МДС. Магнитный поток, сцепляющийся с витками потенциалометра, равен XF = в
= 5ш}х0 $ Нх dl = <Si&>fA0/v
А
Порог чувствительности средств измерений со стационарными индукционными преобразователями определяется главным образохм Механическими "помехами (вибрации, сейсмические и акустические воздействия), которые приводят к колебаниям преобразователя и наведению дополнительной ЭДС, а также дрейфом интегрирующего выходного преобразователя. Наиболее чувствительные магнитоэлектриче
ские веберметры имеют цену деления 5-Ю"6 Вб, афотогальванометри- ческие веберметры — 4*10~8 Вб.
Индукционные преобразователи с вращающимися или вибрирующими чувствительными элементами имеют функции преобразования, которым соответствуют уравнения (8-6)—(8-8).
На рис. 8-44, а показана схема а-преобразователя (так называемого измерительного генератора), который состоит из рамки 1 с числом витков w и вращается при помощи двигателя 2 с угловой частотой Q = dajdt, где а2 — угол между магнитной осью преобразователя и поперечной компонентой вектора магнитной индукции В01 = В0 sin аь где аг — угол между осью вращения преобразователя и вектором В{). При р/ = 1 из уравнения (8-6) получаем е [а (£)] = NSB0 sinax х
Xsiua2da2/dt.
Учитывая,
чтоа2=Ш,
имеем
e[a(t)\=^
QwB0
sin
oti
sin
Q^,
Рис.
8-44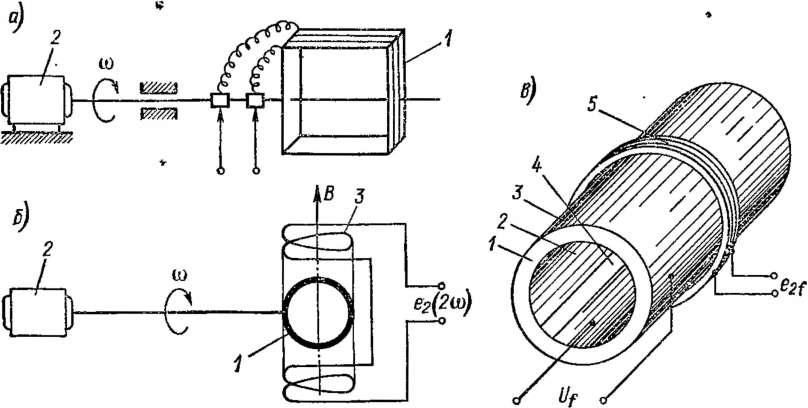
Коэффициент преобразования преобразователя kB — Em/BQ = toS, где Em — амплитудное значение генерируемой ЭДС.
Преобразователи с вращающейся катушкой отличаются высокой чувствительностью (до 300 В/Тл). Порог чувствительности ограничен уровнем шума коллектора и наводками от электродвигателя и цепи питания. Для снижения порога чувствительности используются бесколлекторные токосъемы, а вращение генератора осуществляется через редуктор, с тем чтобы частота выходного сигнала отличалась от частоты сети и не была кратной частоте вращения двигателя.
На рис. 8-44, б изображен четногармонический преобразователь. В качестве вращающегося элемента используется короткозамкнутое кольцо 1, которое вращается двигателем 2 в неподвижной обмотке 3. Магнитное поле, создаваемое током, индуктированным в коротко- замкнутом кольце при его вращении во внешнем поле с индукцией В01 изменяется с одинаковой частотой как по модулю, так и по направлению. Вследствие этого проекция вектора магнитной индукции поля на ось неподвижной обмотки, совпадающей с вектором измеряемой магнитной индукции £0, будет изменяться пропорционально cos2 Qt. Суммарный поток, пронизывающий неподвижную катушку (активным сопротивлением кольца пренебрегаем), равен Ф£ = = SB0 — SB0 cos2 Qt = 0,55Б0 (1—cos 2Q/), и ЭДС, наводимая в неподвижной обмотке, е = QwSB0 sin 2Qt.
Разнесение частот напряжения питания и полезного сигнала позволяет отфильтровать наводки и создать на рассмотренном принципе индукционные преобразователи с порогом чувствительности 1(Г10 Тл.
На рис. 8-44, в показан 5-преобразователь с радиальными колебаниями, возбуждаемыми электр остр и кци он ным вибратором. Вибратором является тонкостенный цилиндр 1 из сегнетокерамики PbZrOg с металлизированными внутренней 2 и внешней 3 поверхностями, куда подводится переменное управляющее напряжение Uf. Внутренний электрод имеет продольный разрез 4, а внешний представляет собой короткозамкнутый виток, на котором находится вторичная многовит- ковая обмотка 5. Вследствие радиальных электр остр и кци онных коле
Рис.
8-45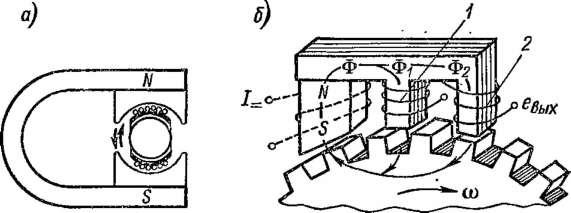
баний периодически изменяется площадь поперечного сечения коротко- замкнутого витка, и при наличии постоянного магнитного поля, вектор магнитной индукции которого направлен по оси цилиндра, в наружном короткозамкнутом витке возникает переменный ток, который вызывает во вторичной обмотке ЭДС, пропорциональную индукции В0. Частота электр остр и кци онных колебаний и выходной ЭДС равна удвоенной частоте управляющего напряжения.
Индукционные преобразователи для измерения частоты вращения. Для измерения частоты вращения используются а - и ^-преобразователи. Конструктивно они отличаются от преобразователей магнитной индукции тем, что дополняются устройством (обычно постоянный магнит), создающим магнитное поле с заданной индукцией, а вращение подвижных элементов осуществляется объектом, частота вращения которого измеряется. На рис. 8-45, а показано принципиальное устройство тахогенератора, выходная ЭДС которого QBNwS sin Qt, где Q — частота вращения катушки.
Для измерения частоты вращения используются также ^-преобразователи с неподвижной обмоткой. Принцип действия такого преобразователя показан на рис. 8-45, б. В этом преобразователе постоянный магнит и катушка, содержащая две полуобмотки с числом витков ш, неподвижны.. При вращении ротора происходит перераспределение
магнитного потока постоянного магнита: увеличивается поток через полюс магнитопровода, под которым проходит зубец ротора, и уменьшается поток через полюс, под которым проходит паз ротора. Поток постоянного магнита остается при этом неизменным, так как полное магнитное сопротивление для суммарного потока остается почти постоянным. Таким образом, в части магнитопровода, образованной полюсами 1 и 2 и ротором, за счет изменения размагничивания полюсов при вращении ротора появляется переменная составляющая магнитного потока, и в катушке индуктируется ЭДС, частота Q которой определяется частотой вращения QMX и числом п зубцов ротора: Q = nQMX, а амплитуда Ет = 20ДФмш, где ДФМ — амплитуда переменной составляющей потока. В подобных преобразователях в качестве выходной величины чаще используется не ЭДС, а частота.
Индукционные преобразователи параметров вибрации. Принцип действия преобразователя виброскорости поясняется рис. 8-46, а. В катушке, колеблющейся в зазоре, индуктируется ЭДС е = = QXmBNwlcp sin Q/, где QXm sin Q/ = х' — скорость катушки, совершающей колебания х = Хт cos Qt\ BN — индукция в зазоре; w и — число витков и средняя длина витка.
Если индукция в зазоре преобразователя составляет В^ ~ 0,5 Тл, диаметр обмотки d — 20 мм, площадь окна, заполняемого проводом, S0KH =(1X5) мм, то, выбрав провод диаметром 0,05 мм (w' = 180 витков/мм2), можно получить коэффициент преобразования kv — 10 В/(м/с), н амплитуда выходного напряжения преобразователя, подвижная часть которого совершает колебания с амплитудой Хт = = 1 мм и частотой f ~ 10 Гц, составляет 0,630 В.
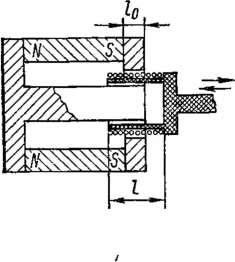
выходного электрического сигнала, повторяющего по форме входной механический сигнал, усредненное по всем виткам значение индукции при колебаниях катушки должно оставаться постоянным. Для этих целей длина катушки I выбирается или меньше ширины зазора /0 так, чтобы при колебаниях катушка не доходила до его краев, или больше ширины зазора так, чтобы края катушки были всегда за пределами зазора (см. §8-2 и 8-4). Обычно индукционные преобразователи применяются для измерения параметров вибраций в диапазоне частот 1—50 Гц при амплитуде вибраций не более 1—5 мм. Чувствительность индукционных преобразователей сейсмоприемников достигает 140 В/(м/с) (например, для СК-1П).
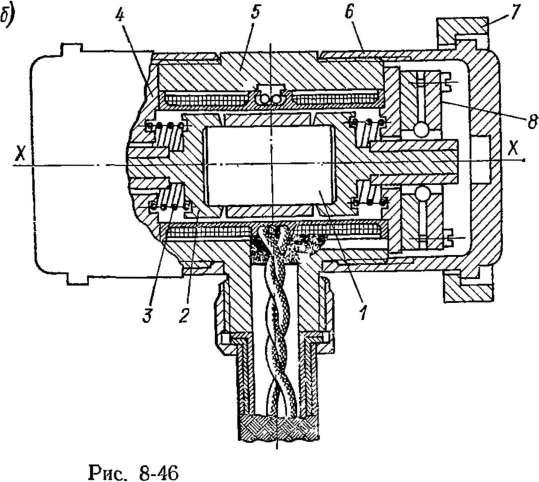
Устройство датчика виброметра показано на рис. 8-46, б. По измерительной оси хх расположена подвижная часть, представляющая
еВых
Рис.
8-47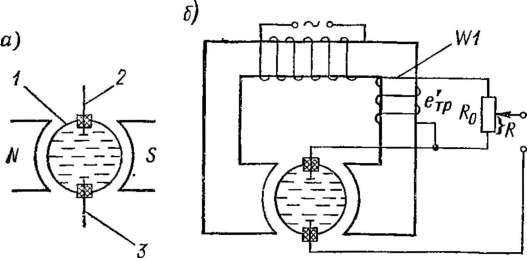
собой магнит 1 и полюсные наконечники 2. Подвижная часть крепится в подшипниках 5, ограничивающих ее перемещения по осям, перпендикулярным измерительной, и поджимается пружинами 3. Измерительная обмотка, состоящая из двух половин, намотана на медный каркас 4 и укреплена в стальной обойме 5, которая одновременно служит корпусом. Датчик закрывается крышками 6 и при помощи фланца 7 крепится к объекту измерения. Магнитные поля в рабочих зазорах, в которых расположены измерительные полуобмотки, направлены встречно; благодаря этому уменьшается погрешность от влияния внешнего магнитного поля. Медный каркас за счет наводимых в нем при движении магнита токов служит для увеличения коэффициента успокоения (см. § 8-5).
Индукционные преобразователи расходомеров. Принцип действия индукционного преобразователя расходомера поясняется рис. 8-47, а. В потоке жидкости, движущейся в трубопроводе 1 из немагнитного материала между полюсами магнита, возникает ЭДС, значение которой ■ пропорционально скорости движения потока: е = BDvf где В — магнитная индукция; D — диаметр трубы; v — скорость движения жидкости. Эта ЭДС снимается с помощью электродов 2 и 3, изолированных от трубопровода.
Как видно из приведенного уравнения, генерируемая в преобразователе ЭДС не зависит от свойств жидкости, и поэтому индукционные расходомеры принципиально могут быть применены для самого широкого класса жидкостей, идиако свойства жидкостей определяют внутреннее сопротивление преобразователя и возможности дальнейшего точного преобразования и измерения ЭДС, поэтому в технических характеристиках расходомера всегда указывается минимальная электрическая проводимость жидкости, для измерения расхода которой он может быть применен.
Индукционные расходомеры используются для измерения скоростей жидких металлов (жидкости с электронной проводимостью), водных растворов (жидкости с ионной проводимостью), и, кроме того, делаются попытки применить их для измерения скоростей диэлектрических жидкостей. Индукционные преобразователи расходомеров промышленного назначения имеют чувствительность 0,5—-1,5 мВ/(м/с). Диаметр трубопроводов может быть весьма значительным, и поэтому для создания магнитного поля используются обычно не постоянные магниты, а электромагниты. В расходомерах для жидких металлов применяются электромагниты, питаемые постоянным током. В расходомерах для воды и электролитов используются электромагниты (рис. 8-47, 6), питаемые для исключения напряжения поляризации только переменным током (частота 10—1000 Гц). В этом случае выходной сигналов = BmDv sin соt также является переменной ЭДС и из него легко могут быть исключены гальванические и термо-ЭДС. Однако в переменном магнитном поле, кроме ЭДС, обусловленной движением контура, будет индуктироваться ЭДС ехр = —д*¥Idt = = соBmSK cos со£, называемая трансформаторной.
Для того чтобы уменьшить трансформаторную ЭДС, провода вторичного контура стремятся расположить так, чтобы площадь SIt сцепления контура с переменным потоком была минимальной. Положение проводников, находящихся в поле, должно быть строго фиксировано, чтобы величина 5К не изменялась. В контур вводятся специальные компенсационные петли (обмотка W1 на рис. 8-47, б), в которых наводится ЭДС е'тр, включаемая встречно с ЭДС егр и регулируемая так, чтобы е-гр — e'rpR/R0 « 0.
Кроме того, помеха в виде трансформаторной ЭДС и полезная ЭДС, пропорциональная скорости движения, как видно из приведенных выражений, сдвинуты по фазе на угол л/2 и могут быть разделены "на выходе фазочувствительным усилителем.
8-11. МАГНИТОМОДУЛЯЦИОННЫЕ ПРЕОБРАЗОВАТЕЛИ
Магнитомодуляционными называются преобразователи, действие которых основано на изменении магнитного состояния ферромагнитного материала при одновременном намагничивании в постоянном и переменном полях. Модуляция магнитным потоком возможна за счет нелинейных свойств магнитной цепи (см. § 8-1 и 8-2).
Магнитомодуляционные преобразователи (ММП) широко используются в счетно-решающей технике в качестве логических элементов и запоминающих устройств. В измерительной технике ММП применяются для измерения напряженности постоянного магнитного поля (феррозонды), для преобразования постоянного тока в переменный с уменьшением абсолютного значения тока (измерительные трансформаторы постоянного тока), для преобразования постоянного тока в переменный с увеличением абсолютного значения тока (магнитные усилители), для измерения перемещения объекта, с которым связывается подвижная часть преобразователя, несущая постоянный магнит (маг* нитомодуляционные преобразователи перемещения).
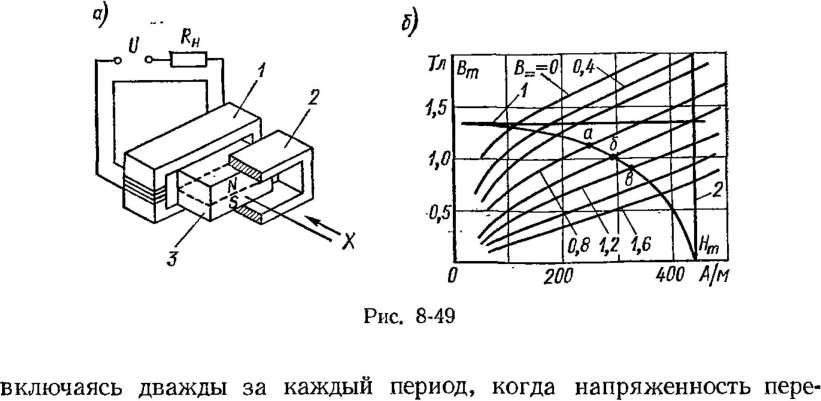
На рис. 8-48, а представлена упрощенно в виде ломаной линии 1 основная кривая намагничивания В = f (Н) ферромагнитного материала; там же показана кривая 2 магнитной проницаемости \х (Н) = = В/Н и кривая 3 дифференциальной магнитной проницаемости

|ад (//) = dBIdH. На этом же рисунке даны кривые 4, 5, и 6 напряжен- ностей переменного магнитного поля Н = Нт sin со/, наложенного на постоянное с напряженностью //„. При этом напряженность переменного поля может быть много меньше напряженности постоянного поля (кривая 4), сравнима с ней по значению (кривая 5) или больше ее (кривая 6), а напряженность постоянного магнитного поля может быть как меньше, так и больше напряженности насыщения НПйС.
Для магнитной цепи ММП характерны три различных режима работы: а) и меньше //нас; б) //_ ^ #ШС1 ^ Hj,;
в) > Янас, //_ <; В первом режиме, показанном на
рис. 8-48, а, магнитное сопротивление переменному потоку зависит от величины и при < Я. может быть определено дифференциальной магнитной проницаемостью [ад. При сравнимых величинах и #_ для анализа работы магнитной цепи используются характеристики двойного намагничивания Вт = f (Нт, £=), приводимые ниже на рис. 8-49.
Во втором режиме (рис. 8-48, б) модулирующим является постоянное поле, сердечник находится в режиме насыщения и выходит из него лишь в те полупериоды переменного напряжения, когда напряженность Н_ направлена навстречу Н„ и достигает такого значения, что результирующая напряженность оказывается меньше напряженности насыщения. Таким образом, для переменного магнитного поля сердечник работает в ключевом режиме, включаясь на отрезке времени аб, когда Н_ + Я^ ^ 0. Всю остальную часть периода магнитная Проницаемость сердечника, показанная на рис. 8-48, б кривой \i (t), мала; обмотка, по которой проходит переменный ток, имеет малую Индуктивность L = w*IZK = \mPSUm и лишь на участке аб магнитная проницаемость и индуктивность резко возрастают.
В третьем режиме модулирующим является переменное поле. Для постоянного магнитного поля сердечник работает в ключевом режиме,
менного поля находится в диапазоне, ограниченном штриховыми прямыми (рис. 8-48, в). Действительно, в ту часть периода, когда Н^ < #нас, магнитная проницаемость сердечника велика и он является для постоянного потока нормальным ферромагнетиком с магнитной проницаемостью р, = (103 -г- Ю5).р0т а в ту часть периода, когда Н_ > #пас, магнитная проницаемость сердечника падает до значения ц, ~ (\0 ~ 1) р,0 и он как бы отсутствует для постоянного магнитного поля. Кривая |Li = / (t) также показана на рис. 8-48, в.
Магнитомодуляционные преобразователи перемещения. Принцип действия преобразователя показан на рис. 8-49, а. Между двумя сердечниками / и 2 из листовой стали расположен постоянный магнит 3. Поток, создаваемый магнитом, замыкается через сердечники. При симметричном положении магнита потоки через сердечники равны и, следовательно, в каждом из сердечников действуют одинаковые индукции постоянного подмагничивания, равные В = 0,5аФ^/(25серд), где Ф„ — поток магнита; сг — коэффициент рассеяния и 5серд — площадь сечения сердечника. На сердечник 1 намотана обмотка с числом витков w9 а сердечник 2 служит магнитным шунтом. Обмотка через резистор подключена к источнику переменного тока 50 Гц. При перемещении магнита влево индукция в сердечнике 1 увеличивается и магнитная проницаемость материала падает. Магнитное сопротивление переменному потоку возрастает, индуктивность обмотки падает, ток и падение напряжения на резисторе RH увеличиваются. Таким образом, входной величиной преобразователя является перемещение магнита, а выходной — падение напряжения на резисторе Ru. Характеристики двойного подмагничивания для листовой стали приведены на рис. 8-49,6.
В том случае, если сердечник 1 находится по переменному потоку в режиме заданной индукции, т. е. R = Ru + Rw — О (Rw — активное сопротивление обмотки) и все напряжение питания уравновешивается противо-ЭДС обмотки, напряженность в материале и, следовательно, определяющий ее ток характеризуются при изменении Я_ точками пересечения прямой 1 с семейством приведенных характеристик. Если сердечник 1 находится в режиме заданной напряженности, т. е. Ru oL и ток через обмотку не зависит от изменения ее противо- ЭДС, то переменная индукция в сердечнике и связанная с ней противо- ЭДС определяются точками пересечения прямой 2 с семейством характеристик. В реальном случае нагрузочная кривая описывается уравнением эллипса
(Вт/В'тГ + (Нт/Н'ту= 1,
где В'т = j/2 (7/(сош5серд); Н'т = 1^2 /ш//серд = j/2 Uw/(lcepnR); В'т — амплитудное значение индукции в режиме заданного напряжения; Н'т — амплитудное значение напряженности в режиме заданного тока; U — действующее напряжение питания; w — число витков обмотки; со — частота; 5серд и /серд — площадь поперечного сечения сердечника и длина магнитной линии по сердечнику.
В качестве примера построим эллипс нагрузки и рассчитаем изменение тока при изменении индукции в сердечнике от В_ = 0,8 Тл до В_ = 1,2 Тл. Размеры преобразователя: толщина сердечника h = 3 мм, ширина 6=10 мм, периметр 50 мм. Число витков в обмотке w ~ 200, сопротивление R = 25 Ом. Получим
Rr _ \f 2 V \Г2 ■ 2,0
m ~ со^серд ~ 2л - 50 - 200 - 3 - 10 • 10-б~ ^ л'
„л
V'2Uw
^2
- 200-2,0 ... л/
=
50-10-3.25
^448
А/М'
Точки а, б ив эллипса нагрузки соответствуют и апр яже нностям На — 242 А/м,- Н6 = 288 А/м и Не = 325 А/м. Эти напряженности соответствуют токам, определяемым формулой I = Hmtcepjl/(V2 w) и равным
I =22°-j°'10"3^43 мА; Ь=49 мА и / =58 мА. \Г2 -200 °
Вопросы расчета и проектирования ММП перемещения подробно рассмотрены JI. Ф. Куликовским и В. Г. Жировым.
Измерительные трансформаторы постоянного тока (ИТПТ) применяются для измерения больших постоянных токов, а также токов и напряжений в высоковольтных цепях постоянного тока.
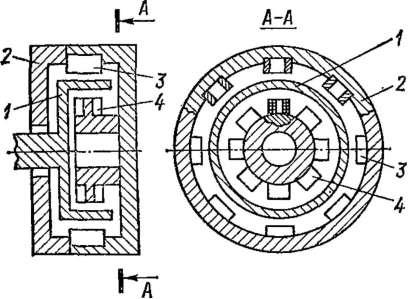
ИТПТ (рис. 8-50, а) состоит из двух одинаковых замкнутых ферромагнитных сердечников из магнитомягкого материала с прямоугольной кривой намагничивания, которые имеют общую первичную обмотку с числом витков Wi = 1, представляющую собой шину, по которой проходит измеряемый постоянный ток, и отдельные вторичные обмотки с числом витков w2, равномерно намотанные на свои сердечники. Вторичные обмотки включаются последовательно-встречно к вспомогательному источнику переменного тока, а протекающий по ним ток i2 обычно выпрямляется и измеряется магнитоэлектрическим амперметром.
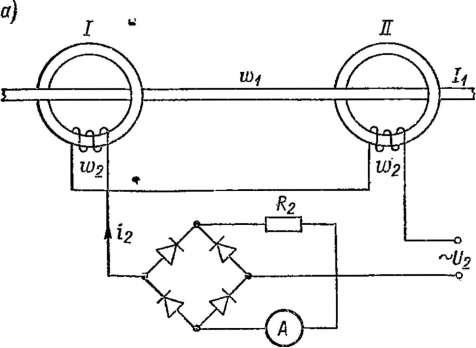
Рис.
8-50
|
в Ат А А" |
|
|
hw< |
iw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
напряженность встречно направленного переменного магнитного поля компенсирует напряженность постоянного магнитного поля (рис.8-48,е).
На рис. 8-50, б изображена идеализированная прямоугольная кривая намагничивания сердечников и показаны МДС, действующие в сердечниках. Под действием МДС lxwx оба сердечника насыщаются. Току 11 соответствует начальная рабочая точка А на участке насыщения кривой намагничивания. Если ток увеличивается, точка А смещается вправо (Л"); при уменьшении /± точка А смещается влево (А'). Ось времени для переменной МДС i2w2 совмещена с вертикальной линией, проходящей через точку А.
Рассмотрим полупериод тока, когда в сердечнике / первичная I1w1 и вторичная i2w2 МДС вычитаются, а в сердечнике 11 •— суммируются. При суммировании МДС индукция в сердечнике остается неизменной, равной индукции насыщения £нас. При вычитании МДС индукция остается неизменной, лишь пока i2w2 < liWx. При равенстве МДС происходит изменение индукции и в обмотке сердечника I индуктируется ЭДС, встречная приложенному напряжению и уравновешивающая его. Таким образом, во вторичной обмотке ток не может превысить значения i2 = lxwjw2. Если допустить, что активные сопротивления полуобмоток, надетых на сердечники / и //, равны нулю, то ток
независимо от значения приложенного напряжения мгновенно возрастает до значения i2 = Iiwjw2y при котором «включается» противо- ЭДС, и кривая вторичного тока, как и показано на рис. 8-50, б, имеет прямоугольную форму. В следующий полу период вследствие встречного включения вторичных обмоток вычитание МДС происходит в сердечнике //, в обмотке которого индуктируется ЭДС, уравновешивающая приложенное напряжение.
Как видно из принципа действия ИТПТ, никакой трансформации энергии не происходит, а имеет место уравновешивание МДС. Среднее значение выпрямленного тока /2ср, протекающего через амперметр, определяется из равенства МДС: /2ср = I^udJw2.
Форма вторичного тока не зависит от формы и частоты вспомогательного напряжения, а также от его значения, если оно выбрано таким образом, чтобы изменение магнитной индукции ДВ в сердечниках было меньше двойного значения индукции насыщения £нас. Последнее эквивалентно условию Вт <С Внас, где Вт — амплитуда переменной индукции в сердечниках при /х = 0, определяемая из выражения = 1^2 ^/2/(4я/^25серд), где 5серд — площадь сечения сердечника; U2 — действующее напряжение вспомогательного источника.
Если ДБ ;> 2£нас, может произойти повторное насыщение работающего сердечника в нижней части цикла перемагничивания и оба сердечника окажутся в состоянии насыщения. При этом вторичный ток перестает зависеть от измеряемого первичного тока и ограничивается только сопротивлением вторичных обмоток. Обычно U2 выбирают из условия Вт = (0,9 -т- 0,75) Виас.
Погрешности ИТПТ с последовательным соединением вторичных обмоток главным образом обусловлены отличием реальной петли перемагничивания сердечников от идеальной прямоугольной петли и в меньшей степени конечным значением сопротивления вторичной цепи ИТПТ.
Для работы в низковольтных-цепях до 1000 В в СССР выпускаются ИТПТ с номинальным первичным током 5; 7,5; 10; 15; 25 и 35 кА, с основной погрешностью 0,5%. Номинальный вторичный ток 5 А. Для измерения постоянных токов в высоковольтных цепях выпускаются ИТПТ с номинальным первичным током 1; 2 и 4 кА. Известны также ИТПТ с пределами измерений до 100 кА и разъемным магнито- проводом, что дает возможность производить их монтаж без разрыва цепи измеряемого тока.
Феррозонды. На рис. 8-51 изображена схема дифференциального феррозонда, состоящего из двух ферромагнитных сердечников J и 2 из железоникелевого сплава, на каждом из которых имеется модулирующая обмотка с числом витков Обмотки питаются от источника переменного тока. Обмотки включены последовательно, но встречно, так что создаваемые ими переменные магнитные потоки сдвинуты на 180°. Оба сердечника с модулирующими обмотками охватывает измерительная обмотка с числом витков w2. При идентичности сердечников вследствие встречного включения модулирующих обмоток в измерительной обмотке не будет индуктироваться ЭДС. Напряженность переменного магнитного поля Нш = (3v 5)#иас. Таким образом, мате
риал сердечников работает в режиме, соответствующем рис. 8-48, в. Магнитная проницаемость обоих сердечников изменяется одинаково и, как видно из рис. 8-48, в, два раза за период возрастает до максимального значения. ■
Если феррозонд поместить в постоянное магнитное поле с индукцией Bv, то условно можно считать, что в это поле дважды за период
fi*
J
е2
1
А
*
Рис. 8-51
Рис.
8-52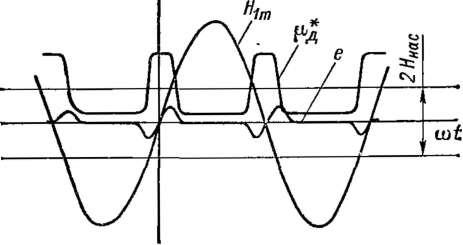
s)
ля и возникающие импульсы индукции наводят ЭДС в измерительной обмотке.
На рис. 8-52 показаны кривые, поясняющие работу четногармонического феррозонда. Из рисунка видно, что р-д периодически изменяется от максимального (при Н1т с Янас) до минимального (при Н1т > > Нтс) значения. Проницаемость сердечников меняется с удвоенной частотой, в результате чего в измерительной обмотке возникает ЭДС удвоенной частоты, пропорциональная индукции Вх и скорости изменения При изменении полярности Вх выходная ЭДС изменяет фазу на 180°.
Обычно в качестве информативного параметра используется амплитуда второй гармоники выходной ЭДС.
Наиболее широкое применение получили феррозонды с продольным возбуждением с разомкнутой (рис. 8-51, а) или замкнутой (рис. 8-51, б) магнитной цепью.
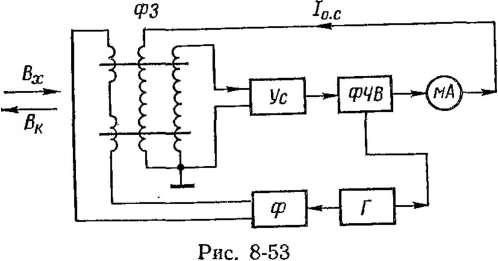
На рис. 8-53 показана структурная схема измерительной цепи феррозон- дового тесламетра. Феррозонд ФЗ питается от генератора переменного тока Г с частотой / = 500 -г- 5000 Гц. Для снижения уровня четных гармоник в токе возбуждения между генератором и феррозондом включен фильтр нижних частот Ф, имеющий наибольшее затухание на частоте второй гармоники. Для выделения сигнала второй гармоники используется избирательный усилитель Ус, настроенный на частоту 2/, и фазочувствительный выпрямитель ФЧВ, на выходе которого включен показывающий или регистрирующий прибор. В тесламетрах на низкие пределы измерения (10 нТл) коэффициент
усиления по второй гармонике составляет 105, а ослабление первой и третьей гармоник в избирательном усилителе должно быть не менее 60 дБ. Для расширения диапазона измерений и улучшения метрологических характеристик (уменьшение нелинейности и инерционности и др.) в тесламетре используется цепь обратной связи, сигнал с которой подается на обмотку обратной связи феррозонда и создает магнитное поле с индукцией Бк, компенсирующее измеряемое.
Основной проблемой при построении высокочувствительных тесла- метров является снижение наводок и шума. Для этой цели применяются хорошо защищенные от наводок измерительные цепи, обладающие высокой избирательностью, датчики феррозондов специальным образом симметрируются, чтобы исключить ЭДС взаимоиндуктивности между первичной и вторичной обмотками. Источниками шумов феррозондов являют- -ся несимметрия петли гистерезиса и магнитный шум Баркгаузена (см. § 8-1 и 8-12). Феррозонд представляет собой один из наиболее чувствительных магнитоизмерительных преобразователей. Нижний предел измерения в лучших преобразователях составляет 0,05—0,1 нТл. Верхний предел измерения ограничен нарушением линейности функции преобразования и обычно не превышает 5-10"4 Тл. Для измерений более сильных полей применяется метод уравновешивания, при котором феррозонд используется в качестве преобразователя неравновесия.
Феррозонды применяются для измерения магнитной индукции слабых постоянных и медленно изменяющихся (с частотой не более 100 Гц) магнитных полей, для измерения углов между какими-либо осями -объекта и вектором магнитной индукции, для обнаружения ферромагнитных объектов, для измерения магнитной восприимчивости и магнитного момента слабомагнитных веществ. Благодаря высокой чувствительности, простоте конструкции, малым габаритам и высокой надежности феррозондовые преобразователи широко используются в качестве портативных авиационных и ракетных тесламетров, градиентометров и угломеров при исследовании магнитного поля Земли, космического пространства, в магнитных системах навигации и ориентации, в магнитной дефектоскопии и при поиске полезных ископаемых.
8-12. ПРЕОБРАЗОВАТЕЛИ НА ОСНОВЕ ЭФФЕКТА БАРКГАУЗЕНА
нических воздействий. Схематическое изображение доменных границ и некоторого вилючения показано на рис. 8-54, а. Граница между двумя доменами с противоположным направлением векторов намагниченности под воздействием внешнего магнитного поля сначала обратимо изменяет свое положение (рис. 8-54, б), а затем скачком переходит в новое положение (рис. 8-54, в). Заштрихованная часть представляет собой область, скачком изменившую свою намагниченность.
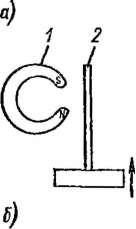
Рис.
8-55![]()
Рис.
8-54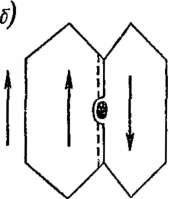
Ф
Вклад СБ в общее изменение намагниченности по данным различных авторов составляет 30—50%. Длительность СБ лежит в диапазоне 0,1—1 мс. При скачках Баркгаузена в измерительной катушке возникают импульсы ЭДС. Таким образом, перем-агничивание образца сопровождается появлением в измерительной обмотке сигнала, имеющего характер случайного процесса.
Очень важной дли проектирования преобразователей на основе эффекта Баркгаузена является зависимость этого эффекта от скорости перемагничивания. С увеличением скорости перемагничивания от 0,01 до 0,24 А/(м«с) число скачков падает примерно на 45%. Этот факт указывает на возможность слияния нескольких скачков, что приводит к зависимости характеристик преобразования от скорости или
частоты перемагничивания.
В зависимости от скорости перемагничивания измерительные преобразователи с использованием эффекта Баркгаузена могут быть разбиты на две группы: с пространственным перемагничи- ванием ферромагнетика и с перемагничиванием ферромагнетика изменяющимся во времени магнитным полем.
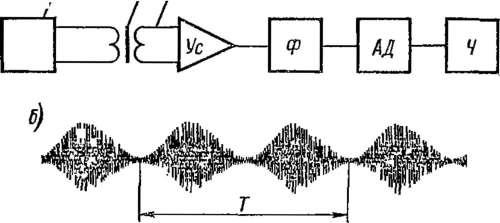
Принцип действия преобразователя с пространственным перемагничиванием ферромагнетика показан на рис. 8-55, а. Мимо постоянного магнита 1 движется со скоростью vx ферромагнитный образец 2. Участок образца, находящийся вблизи магнита, намагничен, и границы этого участка смещаются со скоростью vx. В проходной или накладной измерительной катушке 3, установленной неподвижно, индуктируются импульсы ЭДС, вызываемые скачками Баркгаузена (см. рис. 8-3). Индуктируемая ЭДС представляет собой стационарный случайный процесс (рис. 8-55, б). В качестве информативных параметров этого процесса используются средняя частота выбросов, превышающих заданный уровень, или дисперсия, которые зависят от скорости перемагничивания, т. е. от скорости движения образца. Сигнал измерительной обмотки 3 (рис. 8-55, а) усиливается и подается на полосовый фильтр Фя
подавляющий низкочастотную и высокочастотную части спектра для выделения полезного сигнала. Амплитудный дискриминатор АД выделяет импульсы, амплитуда которых превышает заданный уровень, и сигнал поступает на частотомер Ч, показания которого пропорциональны скорости.
Преобразователь тахометра, основанный на эффекте Баркгаузена, показан на рис. 8-56, а. На вращающемся валу закреплен ротор 1 из ферромагнитного материала. На статоре 2 укреплены магниты под каждым магнитом помещены измерительные катушки 4. На рис. 8-56, б показаны схематически система магнит—на-
а) Б)
Рис.
8-56
X
JL
+
а
1
кладная измерительная катушка, распределение магнитного потока в ферромагнитном роторе и импульс ЭДС в катушке. Амплитуда импульса может быть оценена как е = —ьуДФ/т, где w — число витков обмотки; ДФ — приращение магнитного потока, вызванное скачком Баркгаузена; т — длительность скачка. Измерительные катушки располагаются в области максимального градиента магнитного поля и соединяются последовательно, при этом дисперсия выходного сигнала увеличивается в п раз, где п — число установленных систем. а) 1 2 3
Тахометр позволяет измерять угловые скорости в диапазоне 10~3--10~* рад/с (10~2—1 об/мин) с погрешностью не более 1%. При более высоких скоростях происходит захват доменов, т. е. увеличение размера естественной метки, и уменьшение чувствительности преобразователя.
Рнс.
8-57
лого"? паста они практически отсутствуют. Этим определяется периодически нестационарный характер магнитного шума и индуктируемой им ЭДС. Так же как в случае стационарного процесса, математическое ожидание периодически нестационарного'случайного процесса (ПНСП) постоянно и равно нулю, средняя за период пере- магничивания Т частота выбросов, превышающих заданный уровень, а также усредненная за период и текущая дисперсия являются информативными параметрами при измерении характеристик внешнего магнитного поля, а также при измерении тока и напряжения, определяющих напряженность поля.
При постоянстве функции, описывающей изменение магнитного поля в течение цикла, параметр магнитного шума зависит от объема образца и структурных свойств ферромагнетика, и эффект Баркгаузена может быть положен в основу преобразователя неразрушающего контроля для измерения толщины гальванических покрытий и содержания в них ферромагнетика.
Конструктивно преобразователь представляет собой соленоид, длина которого для обеспечения равномерности магнитного поля в 5—10 раз превышает средний диаметр. В центре соленоида помещается измерительная обмотка, в которую вводится исследуемый образец.
Мощность магнитного шума в преобразователе зависит от числа доменных областей, участвующих в перемагничивании образца при постоянном режиме пере- магничивания. Число доменных областей определяется как толщиной покрытия, так и содержанием ферромагнетика в нем. Влияние толщины выражается в изменении дисперсии случайного процесса без изменения вида ПНСП. Изменение состава гальванического покрытия приводит к изменению вида петли гистерезиса (при уменьшении содержания ферромагнетика петля становится уже и прямоугольнее) и, следовательно, характера ПНСП.
Можно выбрать такое сочетание режима перемагничивания образца и регистрации информативных параметров, при котором разделяется информация о толщине покрытия и о содержании в нем ферромагнетика.
ГЛАВА ДЕВЯТАЯ