

Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение дополнительного образования детей
«Заочная физико-техническая школа Московского физико-технического института (государственного университета)»
ФИЗИКА
Основные законы механики
Задание №1 для 11-х классов
(2012 – 2013 учебный год)
г. Долгопрудный, 2012

2012-2013 уч. год, № 1, 11 кл. Физика. Основные законы механики
Составитель: А.Ю. Чугунов, магистр естественных наук.
Физика: задание №1 для 11-х классов (2012 – 2013 учебный год), 2012, 31 с.
Дата отправления заданий по физике и математике – 28 сентября 2012г.
Учащийся должен стараться выполнять все задачи и контрольные вопросы в заданиях. Некоторая часть теоретического материала, а также часть задач и контрольных вопросов, являются сложными и потребуют от учащегося больше усилий при изучении и решении. В целях повышения эффективности работы с материалом они обозначены символом «*» (звёздочка). Мы рекомендуем приступать к этим задачам и контрольным вопросам в последнюю очередь, разобравшись вначале с более простыми.
Составитель:
Чугунов Алексей Юрьевич
Подписано 25.06.12. Формат 60×90 1/16.
Бумага типографская. Печать офсетная. Усл. печ. л. 1,94 Уч.-изд. л. 1,72. Тираж 1200. Заказ №5-з.
Заочная физико-техническая школа Московского физико-технического института (государственного университета)
ООО «Печатный салон ШАНС»
Институтский пер., 9, г. Долгопрудный, Московская обл., 141700.
ЗФТШ, тел./факс (495) 408-51-45 – заочное отделение
тел./факс (498) 744-6 3-51 – очно-заочное отделение
тел. (499) 755-55-80 – очное отделение
e-mail: zftsh@mail.mipt.ru
Наш сайт: www.school.mipt.ru
© ЗФТШ , 2012
© 2012, ЗФТШ МФТИ. Чугунов Алексей Юрьевич
2

2012-2013 уч. год, № 1, 11 кл. Физика. Основные законы механики
В предлагаемом Задании основное внимание будет уделено примерам решения задач по темам различных разделов механики. Для успешной работы над ним Вам будет полезно использование соответствующего материала школьных учебников по физике.
§1. Кинематика
В кинематике устанавливаются математические соотношения между различными характеристиками механического движения, такими как перемещение, пройденный путь, скорость, ускорение, время движения. При этом механическое движение рассматривается без выяснения причин, его вызывающих.
Пространственное положение тела (материальной точки) определяется с помощью её радиус-вектора r или, что равносильно, совокупности трёх чисел x, y и z, представляющих собой проекции радиус-
вектора на соответствующие оси декартовой системы координат. Дви-
жение тела определено, если известна зависимость радиус-вектора от времени rr(t ) или известны скалярные функции x(t ), y (t ) и z (t ).
Для равномерного прямолинейного движения, т. е. для движения с |
||||||
постоянной скоростью v = const, функция rr(t ) |
имеет вид: |
|||||
|
rr(t )= rr0 + vrt, |
|
|
(1) |
||
для равнопеременного движения с постоянным ускорением a = const |
||||||
r |
r |
r |
r |
|
|
|
at2 |
|
|
||||
r |
(t )= r0 |
+ v0t + |
|
. |
(2) |
|
2 |
||||||
|
|
|
|
|
||
В этих формулах r0 характеризует начальное положение тела и представляет собой его радиус-вектор в начальный момент времени t = 0, соответственно vr0 – начальная скорость тела при t = 0.
Зависимость мгновенной скорости v (или просто скорости v ) тела от времени t при равнопеременном движении получается путём диффе-
ренцирования (2) по времени и имеет вид: |
|
||
r |
r |
r |
(3) |
v(t )= v0 |
+ at. |
||
Часто в процессе решения задач для удобства приходится переходить от одной системы отсчёта (условно назовем её неподвижной) к другой системе отсчёта, движущейся определённым образом относительно первой. В этих случаях необходимо знать так называемые формулы преобразования радиус-векторов, скоростей и ускорений тел в различ-
ных системах отсчёта. Так, если одна сиcтема отсчёта движет-ся поступательно относительно другой, условно неподвижной, то справедливы следующие соотношенияr r дляrуказанныхr r величинr r
r r′ r = r0 + r′, v = v0 + v′, a = a0 +a′,
где r и r – радиус-векторы материальной точки соответственно в не-
© 2012, ЗФТШ МФТИ. Чугунов Алексей Юрьевич
3
2012-2013 уч. год, № 1, 11 кл. Физика. Основные законы механики
подвижной и движущейся системах отсчёта, r0 – радиус-вектор начала
координат (точки O′) движущейся системы отсчёта в неподвижной системе отсчёта. Аналогичные обозначения использованы в приведённых формулах для скоростей и ускорений материальной точки.
Из последней формулы вытекает важное следствие, а именно, при ar0 = 0, когда скорость поступательно движущейся системы отсчёта
постоянна, ускорения материальной точки в неподвижной и движущейся системах отсчёта одинаковы.
При решении задач бывает удобно записывать векторные кинематические уравнения в проекциях на оси координат. В случаях, когда траектория тела лежит в одной плоскости, можно ограничиться двумя координатными осями Ox и Oy, так чтобы исходные векторные уравнения
сводились к двум скалярным. Для этого нужно всего лишь совместить плоскость xOy с плоскостью траектории тела. Так, например, вектор-
ные уравнения (2) и (3) будут соответственно эквивалентны системам скалярных уравнений (4) и (5):
x(t )= x + v |
0 x |
t + |
axt2 |
, |
|
|
|
v |
|
t |
|
= v |
+ a |
|
t, |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
0 |
|
2 |
|
|
|
|
|
x ( |
) |
x |
|
|
|
|||||||||||
|
|
|
|
|
|
(4) |
|
|
|
|
0 x |
|
|
|
|
|
(5) |
||||||||
|
|
|
|
|
a |
t2 |
|
|
|
|
vy (t )= v0 y + ayt. |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
y (t )= y0 + v0 yt + |
|
y |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Здесь |
x(t ), y (t ); x0 , y0 ; v0 x , v0 y ; vx , vy ; ax , ay – проекции на оси Ox и |
||||||||||||||||||||||||
Oy векторов rr(t ); rr0 ; vr0 ; vr и a соответственно. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
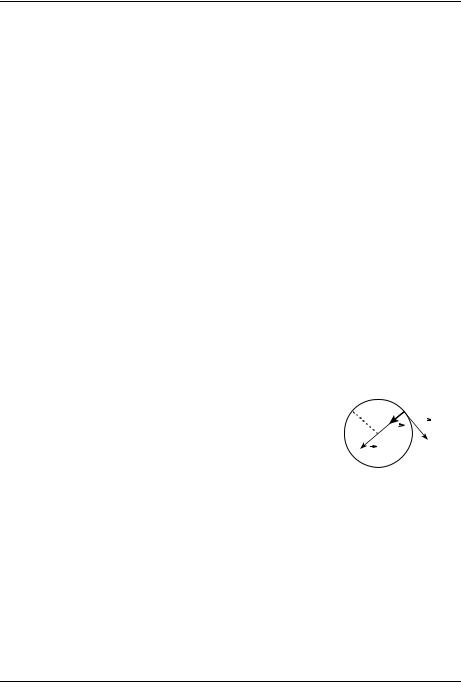
При равномерном движении тела по окружности |
R |
|
|
|
|
|
|
|
|||||||||||||||||
вектор скорости |
изменяется |
только |
по |
направле- |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
v |
|||||||||||||||||||||
|
|
|
an |
||||||||||||||||||||||
нию, оставаясь неизменным по модулю и направ- |
|
|
|
|
|
|
|||||||||||||||||||
|
n |
|
|
|
|
|
|
|
|||||||||||||||||
ленным по касательной к окружности. |
При этом |
|
|
|
|
|
|
|
|
||||||||||||||||
вектор ускорения направлен |
к центру окружности |
Рис. 1 |
|
|
|
||||||||||||||||||||
перпендикулярно вектору скорости, т. е. |
по норма- |
|
|
|
|||||||||||||||||||||
ли nr к траектории (рис. 1). Такое ускорение |
часто называют центро- |
||||||||||||||||||||||||
стремительным или нормальным, его модуль равен |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
a = |
v2 |
, |
|
|
|
|
|
|
|
|
|
|
|
(6) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
n |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где R – радиус окружности. Эта же формула справедлива и при движении тела с постоянной по модулю скоростью v по произвольной криволинейной траектории. В этом случае R есть радиус кривизны траектории в рассматриваемой точке. Вектор ускорения an направлен к цен-
тру кривизны перпендикулярно вектору скорости и характеризует изменение скорости по направлению.
© 2012, ЗФТШ МФТИ. Чугунов Алексей Юрьевич
4
2012-2013 уч. год, № 1, 11 кл. Физика. Основные законы механики
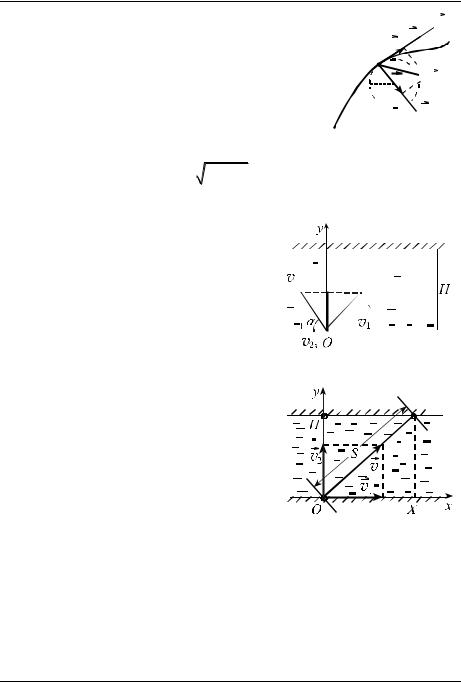
Если же скорость изменяется не только по направлениюr , но и по модулю, то у вектора ускорения a кроме нормальной составляющей (6) будет ещё такr называемая тангенциальная составляющая aτ , направленная по касательной τ к траек-
тории в данной точке (рис. 2) в сторону вектора скорости или против него в зависимости от того, увеличивается или уменьшается модуль скорости тела. Модуль полного ускорения a по теореме Пифагора будет равен
a = aτ2 + an2 .
τ
aτ v

an 

 a
a
 R
R







 n
n
Рис. 2
Решение кинематических задач сводится к использованию указанных выше формул и уравнений в конкретных сформулированных условиях.
Задача 1. Необходимо переправиться через реку шириной H. Под каким углом
α к течению должна плыть лодка, чтобы  переправиться на противоположный бе-
переправиться на противоположный бе- 







 рег за минимальное время? Где окажется
рег за минимальное время? Где окажется 








 лодка, переплыв реку? Какой путь S она
лодка, переплыв реку? Какой путь S она 









 пройдёт, если скорость течения реки по-
пройдёт, если скорость течения реки по- 









 стоянная и равна v1 , а скорость лодки
стоянная и равна v1 , а скорость лодки 











относительно воды постоянна и |
равна |
|
|
||||
vr2? |
|
|
|
|
|
|
Рис. 3 |
Решение. Поместим начало O непод- |
|
||||||
вижной системы отсчёта в то место, где |
|
||||||
лодка отчаливает от берега. Оси координат |
|
||||||
направим так, как показано на рис. 3. При |
|
||||||
таком выборе системы отсчёта начальные |
|
||||||
координаты лодки равны нулю: |
|
|
|
|
|
|
|
x0 =0, y0 =0. |
|
|
систе- |
|
|||
Скорость лодки v в выбранной |
|
|
|||||
ме отсчёта равна векторной сумме cкорос- |
|
||||||
ти течения vr1 и скорости лодки относи- |
Рис. 4 |
||||||
тельно воды vr2 , то есть v = vr1+ vr2 . |
|
|
|
|
|
|
|
Предположим, что вектор v2 составляет с берегом угол α . Посколь- |
|||||||
ку лодка движется прямолинейно и равномерно, то, записав уравнение |
|||||||
(1) в проекциях на оси координат, получим: |
|
||||||
x = |
(v −v |
2 |
cosα) t, |
|
|||
|
|
1 |
|
|
|
||
y = |
(v |
2 |
sinα) t. |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
© 2012, ЗФТШ МФТИ. Чугунов Алексей Юрьевич |
|
|
|
|
5 |
||
|
|
|
|
|
|
|
|
2012-2013 уч. год, № 1, 11 кл. Физика. Основные законы механики
Время tn , необходимое для переправы через реку, находим из по-
следнего уравнения при условии y = H , а именно tn = v2 sinH α . Значение tn будет минимальным, если sinα максимален, т. е. при α =π / 2. От-
сюда tmin = H . Этот случай показан на рис. 4. При α = π2 уравнение для v2
x принимает вид: x = v1t. Поэтому, когда лодка окажется на другом бе-
регу, смещение X вдоль оси Ox будет равно X = v t |
min |
= |
v1 |
H. |
|||
|
|||||||
|
|
|
1 |
|
v2 |
|
|
|
|
|
|
|
|
|
|
Длину S пройденного лодкой пути найдём по теореме Пифагора: |
|||||||
S = X 2 + H 2 = |
H |
v2 |
+ v2 . |
|
|
|
|
|
|
|
|
|
|||
1 |
2 |
|
|
|
|
||
|
v2 |
|
|
|
|
|
|
Задача 2. Тело бросают с поверхности земли, сообщив ему начальную скорость vr0 , направленную под углом α к горизонту. Пренебрегая
сопротивлением воздуха, найдите нормальную и тангенциальную составляющие ускорения тела на высоте h , когда тело ещё не достигло
наивысшей точки траектории. Найдите также время tn подъёма тела на
высоту h и горизонтальную проекцию l перемещения тела в этот момент времени.
Решение. Направим оси декартовой прямоугольной системы координат так, как показано на рис. 5. Начало отсчёта O поместим в точку бросания. Запишем начальные условия движения тела: x0 = 0, y0 =0,
v0 x = v0 cosα, v0 y = v0 sinα. При отсутствии сопротивления воздуха те-
ло движется с постоянным ускорением, равным ускорению свободного падения gr, направленным вертикально вниз. Проекции ускорения тела
на оси координат равны: ax = 0, ay = −g . С учётом сказанного кинема-
тические уравнения равнопеременного движения (4) и (5) в нашем случае принимают вид:
x =(v0 cosα)t, |
|
|
|
|
v |
x |
= v |
cosα, |
|
|
|
|
|
2 |
(7) |
|
|
0 |
|
(8) |
|
|
|
gt |
|
|
|
|
|
|||
y =(v0 sinα)t |
− |
|
, |
vy = v0 sinα − gt. |
|
|||||
|
|
|
||||||||
2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Пусть при t =tn тело достигло высоты h, |
тогда |
y = h, x =l. В этом |
||||||||
случае уравнения системы (7) дают:
© 2012, ЗФТШ МФТИ. Чугунов Алексей Юрьевич
6