

Трухан. Динамика твердого тела
.pdf31
Если при рассмотрении регулярной прецессии ось OZ совместить с направлением вектора кинетического
момента KO , то проекция вектора KO на плоскость Oξη
дает
Kξη = KO sinθ = Aψ sinθ,
откуда |
|
|
|
|
||||||||
|
|
|
|
|
|
KO = Aψ. |
(5.2) |
|||||
При регулярной прецессии векторы |
|
|
|
|
||||||||
|
|
O = Aψ sinθ e +Crk |
|
, |
|
|
|
|
|
|
|
|
|
K |
|
ω |
=ψ sinθ e +rk |
, |
ϕ |
= ϕk лежат в |
|||||
одной плоскости Π, которая вращается вокруг вектора KO с угловой скоростью прецессии. Причем эти векторы неподвижны в плоскости Π. Векторы ω и ϕ постоянны по
величине и образуют постоянный угол с |
K |
O . |
|
|
|
Кроме того, в этом случае справедливо равенство |
|||
|
Cϕ+(C − A)ψ cosθ = 0, |
(5.3) |
||
которое легко следует из рассмотрения проекции |
|
|||
Kζ |
= KO cosθ = Aψ cosθ = Cr = C(ϕ+ψ cosθ). |
|
||
Из |
(5.3) с учетом равенства ψ cosθ = r −ϕ |
получаем |
||
ϕ = A −AC r.
Следует иметь в виду также, что в зависимости от
|
|
|
|
_ |
|
|
_ |
|
__ KO |
|
_ |
KO |
|
ψ. |
ζ |
ω |
|
ζ |
_ |
|
|
_._ |
|
ω |
|
|
|
|
|
A>C |
_. |
ψ |
A<C |
O |
O |
|
_ |
||
|
ϕ |
|
. |
|
|
|
|
|
ϕ |
|
Рис. 5.1 |
|
Рис. 5.2 |
|

|
|
|
|
|
|
32 |
|
|
|
|
|
|
|
||
соотношения между моментами инерции |
A и C взаимное |
||||||||||||||
расположение векторов |
|
|
, |
|
|
O и |
|
может быть различным, |
|||||||
ω |
|
K |
ϕ |
||||||||||||
что видно из рис. |
5.1 и рис. 5.2. При A > C угол между |
||||||||||||||
угловой скоростью |
собственного |
вращения |
|
|
и угловой |
||||||||||
ϕ |
|||||||||||||||
|
|
|
острый, |
|
а при |
A <C |
это угол |
||||||||
скоростью прецессии ψ |
|
||||||||||||||
тупой. Иногда первый случай называют прямой прецессией, а второй – обратной. (При A =C перманентное вращение).
|
C |
||
Задача 5.1. Гироскоп A = B = |
|
вращается по |
|
2 |
|||
|
|
||
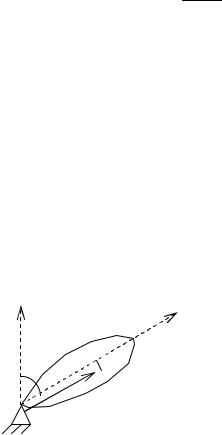
инерции вокруг центра тяжести. В начальный момент гироскопу сообщена угловая скорость ω вокруг оси, образующей угол α с осью симметрии. Найти движение гироскопа.
Решение. Движение – регулярная прецессия, так как тело движется по инерции, и оно симметрично. В случае Эйлера регулярная прецессия совершается вокруг направления вектора кинетического момента. Так как C > A,
то прецессия обратная (см. рис. 5.2). Определим параметры прецессии (ψ, ϕ,θ). Для этого найдем сначала KO :
KO 2 = A2 (p2 + q2 )+ C2 r2 = A2ω2 sin2 α + 4A2ω2coα.
Тогда угловая скорость прецессии равна (см. (5.2))
ψ = |
KO =ω 1+3cos2 |
α. |
|
A |
|
Используя соотношение компонент вектора, получаем угол нутации

33
θ = arctg |
A p2 |
+ q2 |
= arctg |
Aω sinα |
tg α |
||
Cr |
2Aω cosα |
== arctg |
2 |
. |
|||
|
|
|
|
||||
|
|
Так как прецессия обратная, то |
|||||
ζ |
_ |
r =ψ cosθ −ϕ, где ϕ |
- модуль |
||||
|
KO |
вектора |
угловой |
|
скорости |
||
|
_ |
собственного вращения, откуда |
|||||
θ |
|
ϕ = −ω cosα. |
|
||||
ω |
|
|
|||||
α |
Итак, движение – |
регулярная |
|||||
ξ |
|||||||
O |
|
прецессия |
с угловой |
скоростью |
|||
Рис. 5.3 |
прецессии |
ψ =ω 1+3cos2 α, |
|||||
|
угловой скоростью собственного |
||||||
|
|
||||||
вращения ϕ = −ωcosα |
|
|
tg α |
|
|||
и углом нутации θ = arctg |
|
. |
|||||
|
|||||||
|
|
|
|
2 |
|
||
5.2. Вынужденная регулярная прецессия
Часто при конструировании систем необходимо решать задачу определения воздействия, обеспечивающего то или иное движение, т.е. решать обратную задачу динамики. В частности, пусть движение симметричного тела с одной неподвижной точкой есть регулярная прецессия. Какому условию удовлетворяет вынуждающее воздействие, обеспечивающее это движение? Оказывается момент, поддерживающий регулярную прецессию, удовлетворяет условию
|
|
|
|
|
|
|
|
C − Aψ |
|
|
||
MO = Cψ ×ϕ |
+ |
(5.4) |
||||||||||
1 |
C |
ϕ |
cosθ |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||
(см. М.А. Айзерман. Классическая механика).
Это равенство называется точной формулой гироскопии. При решении задач, где требуется определить момент MO или

|
|
|
|
|
|
|
|
|
|
|
|
|
34 |
|
|
|
|
|
|
|
|
|
|
|
параметры |
регулярной |
|
прецессии, |
целесообразно |
||||||||||||||||||||
использование этой формулы. |
|
|
|
|
|
|
||||||||||||||||||
|
|
При |
ϕ >>ψ |
справедлива приближенная |
формула |
|||||||||||||||||||
гироскопии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
O = Cψ |
×ϕ. |
|
|
(5.5) |
||||||
|
|
Задача 5.2. Колесный скат весом |
P, |
радиуса |
a |
|||||||||||||||||||
движется равномерно |
|
со |
скоростью |
V |
по |
закруглению |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
радиуса |
R, |
лежащему |
в |
||||||
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
горизонтальной |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
плоскости. |
Определить |
||||||||
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
давление ската на рельсы, |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
E |
|
|
|
D |
|
|
если |
|
момент |
инерции |
|||||||||||
|
|
|
|
|
|
|
Рис. 5.4 |
|
|
|
|
|
|
|
ската |
|
относительно оси, |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
проходящей через центры |
|||||||||
колес, равен C, а расстояние между рельсами l.
Решение. Будем вести рассмотрение в неинерциальной системе координат с началом в центре масс и движущейся поступательно. Кроме активной силы P и
переносной силы инерции J = |
P V 2 |
, следует учесть силы |
||||
|
|
|
||||
g R |
||||||
|
|
|
||||
реакции: горизонтальную |
F (действующую на одно колесо |
|||||
ската) и вертикальные N1 |
и N2 |
(см. рис. 5.5). |
||||

|
|
35 |
|
|
|
|
_ |
|
|
_ |
|||
N1 |
|
|
|
N2 |
||
|
|
_ |
|
|
|
|
|
|
J |
|
|
|
|
E |
_ |
_ |
D |
|||
P |
F |
|||||
|
|
|
|
|||
|
|
Рис. 5.5 |
|
|
|
|
Так как в выбранной системе координат центр масс покоится, то главный вектор сил, приложенных к скату, равен нулю, и, следовательно,
J − F = 0, N1 + N2 − P = 0,
и, значит,
F = |
P V 2 |
N1 + N2 = P. |
|
||||
|
|
|
|
, |
(5.6) |
||
g |
|
R |
|
||||
|
|
|
|
|
|
||
Движение ската |
|
|
– |
вынужденная |
регулярная |
||
прецессия с угловой скоростью прецессии ψ = VR , угловой скоростью собственного вращения ϕ = Va и углом нутации
θ = |
π |
, поэтому можно воспользоваться формулой |
|
2 |
|
гироскопии. (Точная и приближенная в данном случае совпадают). Имеем
C |
|
|
|
|
= C |
V 2 |
= N |
|
l |
− N |
|
l |
− Fa. |
|
ψ ×ϕ |
|
(5.7) |
||||||||||||
Ra |
2 2 |
1 |
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
Решая совместно (5.6) и (5.7), находим
N1 = P −V 2 (C +ma2 ), 2 Ral

36
N2 = P +V 2 (C +ma2 ). 2 Ral
Вместо формулы гироскопии можно было бы воспользоваться динамическими уравнениями Эйлера. При этом проекции векторов угловой скорости ω и углового
ускорения ε |
на |
главные |
центральные оси равны |
||||||
соответственно |
|
|
|
|
|
|
|
||
p =ψ sin ϕt, |
p =ψ ϕcosϕt, |
|
|||||||
q =ψ cosϕt, |
q = −ψ ϕsin ϕt, |
|
|||||||
r = ϕ, |
r = 0. |
|
|
|
|
|
|
||
Уравнение Эйлера для оси ξM |
|
|
|
|
|
||||
Aψϕcosϕt +(C − A)ψϕcos ϕt = |
|
|
|
|
|||||
|
|
|
l |
|
|
l |
|
|
|
= Cψϕcos ϕt = Mξ = − N1 |
|
+ N2 |
|
− Fa cos ϕ |
t. |
||||
2 |
2 |
||||||||
|
|
|
|
|
|
|
|||
Откуда с учетом (5.6) следует ответ.
5.3. Регулярная прецессия в случае Лагранжа
В случае Лагранжа регулярная прецессия может быть только вынужденной, и поэтому при регулярной прецессии выполняется равенство (5.4). Верно и обратное, т.е. если в случае Лагранжа при движении выполняется точная формула
гироскопии и в начальный момент θ = 0 (если θO ≠ 0,
регулярной прецессии быть не может), то движение есть регулярная прецессия. В самом деле, пусть при движении
выполняется (5.4) и θO = 0. Покажем справедливость
утверждения с помощью уравнений Лагранжа. Функция Лагранжа для этого случая дана формулой (3.18). Так как в случае Лагранжа координаты ψ и ϕ циклические, то
∂L |
= Aψ sin2 θ +Cr cosθ = const, |
(5.8) |
|
∂ψ |
|||
|
|
|
37 |
|
∂L |
= C(ϕ+ψ cosθ)= const. |
(5.9) |
∂ϕ |
|
|
Уравнение Лагранжа для координаты θ :
Aθ +Cψ ϕsinθ +(C − A)ψ 2 sin22θ = mgl sinθ.
В силу равенства (5.4) имеем θ = 0, откуда θ =θ t +θO . Но по предположению θO = 0 и поэтому θ =θO .
Из (5.8) и (5.9) следует, что тогда ψ = const и ϕ = const, т.е. движение – регулярная прецессия.
При решении задач в данном случае используют также формулу гироскопии и теорему о движении центра масс.
Задача 5.3. Симметричный волчок
массы m в начальный момент получил угловую скорость собственного вращения ω, причем его ось симметрии в этот
момент образовывала с вертикалью угол θO . Какой должна
быть начальная |
угловая скорость прецессии ψ, чтобы |
||||
движение волчка являлось |
регулярной прецессией, если |
||||
|
ζ |
расстояние |
центра |
масс |
от |
Z |
неподвижной точки опоры |
||||
|
|
равно l ? Определить при |
|||
M |
|
регулярной |
прецессии |
||
|
реакцию опоры. Показать, |
||||
θ |
|
||||
l |
|
что при |
ω >>ψ |
угловая |
|
O |
|
скорость |
прецессии |
не |
|
|
|
зависит от угла нутации. |
|
||
Рис. 5.6 |
|
Решение. |
Угловую |
||
|
скорость прецессии находим |
||||
|
|
||||
из формулы гироскопии (5.4), которая в данном случае имеет вид

38
|
(C − A) |
ψ |
|
|
||
ψωsinθ C + |
ω |
cosθ = mgl sinθ, |
|
|||
|
|
|
|
|
||
что дает (C − A)ψ 2 cosθ +Cωψ −mgl = 0. |
(5.10) |
|||||
Откуда |
|
|
|
C 2ω2 +(C − A)mgl cosθ |
|
|
ψ = |
|
−Cω ± |
. |
(5.11) |
||
|
|
|
|
|||
|
|
|
|
2(C − A)cosθ |
|
|
Из (5.11) видно, что регулярная прецессия может быть реализована только при положительном дискриминанте уравнения (5.10), т.е. при определенных соотношениях между параметрами системы. Из (5.10) заключаем, что при ω >>ψ первым членом можно пренебречь, тогда угловая
скорость прецессии равна
ψ = mglCω
и не зависит от угла нутации.
Горизонтальную составляющую F и вертикальную составляющую N реакции опоры определяем с помощью теоремы о движении центра масс:
mψ 2l sinθ = F,
N −mg = 0.
Откуда
R =  F 2 + N 2 = m g 2 +ψ 2l 2 sin2 θ.
F 2 + N 2 = m g 2 +ψ 2l 2 sin2 θ.
5.4. Элементарная теория гироскопа
Если ϕ >>ψ, то при движении тела с неподвижной точкой справедлива приближенная формула гироскопии
dK
dtO = Cψ ×ϕ = M O .

39
При этом у гироскопа обнаруживается ряд эффектов, называемых гироскопическими.
При ϕ |
>>ψ |
можно считать, |
что вектора |
|
O , |
|
, |
|
|
||||||||||
K |
ω |
ϕ |
|
||||||||||||||||
|
_ |
направлены |
вдоль |
оси |
симметрии |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Z |
гироскопа и KO = Cϕ. Это основное |
||||||||||||||||||
ω |
|||||||||||||||||||
|
|
допущение |
элементарной |
теории |
|||||||||||||||
|
_. |
гироскопа. Оно позволяет судить о |
|||||||||||||||||
|
поведении оси гироскопа, |
исходя из |
|||||||||||||||||
|
ϕ |
теоремы об изменении кинетического |
|||||||||||||||||
|
|
||||||||||||||||||
__ |
|
момента. Действительно, пусть K - |
|||||||||||||||||
ψ. |
|
точка оси, совпадающая с концом |
|||||||||||||||||
O |
|
вектора |
K |
O , |
тогда |
можно |
записать |
||||||||||||
Рис. 5.7 |
|
|
|
|
|
|
|
|
|
||||||||||
|
VK = MO . Таким образом, |
скорость |
|||||||||||||||||
конца вектора кинетического момента, а значит, и точка K оси гироскопа, равна по величине и направлению главному моменту внешних сил относительно неподвижной точки (теорема Резаля). Эта теорема позволяет объяснить особенности поведения оси быстро вращающегося гироскопа.
Если на ось уравновешенного гироскопа начнет действовать сила, то ось гироскопа отклонится не в
направлении действия силы, а в направлении момента MO
этой силы относительно неподвижной точки. Это один из гироскопических эффектов.
Второе необычное свойство быстро вращающегося гироскопа – безынерционность движения его оси - заключается в том, что с прекращением действия силы
момент MO обращается в нуль, а значит, и VK = 0, т.е. с
прекращением действия силы движение оси мгновенно прекращается. Это свойство гироскопов широко используется в технике.

40
Если гироскоп совершает прецессию за счет движения основания, на котором он укреплен, то момент
MO обусловлен силами давления подшипников, в которых
закреплена ось гироскопа. К основанию же со стороны гироскопа будет приложена пара сил с моментом, называемым B гироскопическим, равным и
противоположным по
|
O |
направленным |
|
M |
O , |
т.е. |
||||
|
|
|
Г = − |
|
O. |
|
|
|
|
|
E |
|
|
M |
M |
|
|
|
|
||
D |
|
|
Задача |
5.4. Рамка |
||||||
A |
|
уравновешенного |
|
гироскопа |
||||||
ζукреплена на неподвижном основании с помощью
подшипников E и D. Определить давление на подшипники E и D рамки, обусловленное гироскопическим моментом, если рамка поворачивается вокруг оси ED с угловой скоростью ω,
ротор гироскопа совершает n оборотов в секунду вокруг оси
Oζ , расстояние |
ED = l. Момент инерции ротора |
относительно оси Oζ |
равен C. Массой рамки пренебречь. |
Решение. Так как центр масс системы покоится, то главный вектор сил равен нулю. Воздействие на ось ротора приводится к паре сил, возникающих в точках A и B.
Момент MO этой пары направлен вертикально вниз и равен
по величине
_
RE E
M O = Cψ
_
MГир
B
×ϕ = C2π nω. В свою очередь со
|
стороны оси ротора |
|
|
на подшипники A и |
|
|
B |
будет |
|
действовать |
пара |
D |
сил |
с |
|
гироскопическим |
|
_
RD