

Нелинейные задачи оптимального управления
Под нелинейными задачами будем понимать такие, в которых уравнения связи объекта
![]()
нелинейны по
переменным
![]() и
и![]() ,
хотя в большинстве случае имеет место
нелинейность по управлению. К нелинейным
задачам относятся также задачи, в которых
подынтегральная функция
,
хотя в большинстве случае имеет место
нелинейность по управлению. К нелинейным
задачам относятся также задачи, в которых
подынтегральная функция![]() в функционале
в функционале
![]()
нелинейна по
переменным
![]() и
и![]() .
.
Уравнения движения объекта, нелинейного по координатам с одним линейным управлением можно записать в следующей векторно-матричной форме:
![]() ,
,
где ![]() – вектор состояний объекта
– вектор состояний объекта![]() ,
,
![]() –функциональная
матрица-столбец с элементами
–функциональная
матрица-столбец с элементами
![]() ,
,
![]() –функциональная
матрица-столбец с элементами
–функциональная
матрица-столбец с элементами
![]() .
.
Например, если задана электрическая печь со схемой:
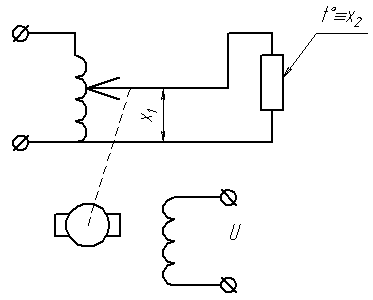
то из физических соображений можно записать систему нелинейных дифференциальных уравнений
 ,
,
что в матричной
форме записи
![]() соответствует матрицам
соответствует матрицам
![]() ,
,
![]() .
.
Системы с ограничениями ресурсов управления для нелинейных объектов.
Для объекта в форме
![]() , (1)
, (1)
требуется найти
допустимое управление
![]() ,
доставляющее минимум интегральному
функционалу
,
доставляющее минимум интегральному
функционалу
![]() , (2)
, (2)
характеризующему расход ресурсов управляемой системы или отклонения фазовых переменных системы. Поставленная задача называется задачей с ограничениями ресурсов.
Применим для
решения задачи (1), (2) принцип максимума.
Функция
![]() и вспомогательная система для
и вспомогательная система для![]() при
при![]() выглядит так:
выглядит так:
![]()
![]()
Поскольку
![]() линейна по управлению,
линейна по управлению,![]() задано на замкнутом интервале, то,
согласно теореме Вейерштрасса о максимуме
линейной формы, максимум
задано на замкнутом интервале, то,
согласно теореме Вейерштрасса о максимуме
линейной формы, максимум![]() достигается на границах ограничения
по
достигается на границах ограничения
по![]() .
Тогда оптимальное управление будет
кусочно-непрерывным (что мы видели в
задаче ТО) и определится выражением:
.
Тогда оптимальное управление будет
кусочно-непрерывным (что мы видели в
задаче ТО) и определится выражением:
![]() ,
,
которое означает, что
 .
.
Если на некотором
интервале времени скалярное произведение
![]() и соответственно
и соответственно![]() ,
,![]() ,
то принцип максимума позволяет однозначно
определить оптимальное управление.
Такая ситуация получила название
вырожденной или особой и первая проблема,
которая возникает при этом – проблема
вычисления особого управления.
,
то принцип максимума позволяет однозначно
определить оптимальное управление.
Такая ситуация получила название
вырожденной или особой и первая проблема,
которая возникает при этом – проблема
вычисления особого управления.
Кстати, возникновение особых режимов – признак сложности задачи, наиболее часто он встречается для NLO.
Для вычисления особого управления применяется несколько способов, которые можно разбить на две группы:
нахождение особого управления путем анализа вспомогательных переменных
 (способ перебора управлений таких,
чтобы
(способ перебора управлений таких,
чтобы ).
).определение особого управления в явном виде от переменных и параметров объекта (способ условий общности положения УОП).
Предпочтительнее,
конечно, второй путь, т.к. исключение
![]() в сложных задачах практически не
выполнимо.
в сложных задачах практически не
выполнимо.
Введем УОП для NLSв расширенном пространстве переменных
размерностью (n+1). Определим
дополнительную переменную![]() ,
удовлетворяющую условию
,
удовлетворяющую условию![]() .
.
В пространстве
![]() получим расширенную систему (n+1)
уравнений:
получим расширенную систему (n+1)
уравнений:
![]() ,
,
где
![]() ,
,![]() ,
,![]() .
.
П усть
максимум
усть
максимум![]() для расширенной системы достигается
на грани или ребре многогранника
ограничений по
для расширенной системы достигается
на грани или ребре многогранника
ограничений по![]() .
Тогда на этом интервале времени
.
Тогда на этом интервале времени![]() скалярное произведение
скалярное произведение
![]() ,
,
где
![]() – вектор, параллельный некоторой грани
или ребру
– вектор, параллельный некоторой грани
или ребру![]() .
На рисунке показана ситуация, когда
неопределенной является величина
управления
.
На рисунке показана ситуация, когда
неопределенной является величина
управления![]() .
.
Продифференцируем
выражение
![]() nраз по времени, получим
систему (n+1) уравнений:
nраз по времени, получим
систему (n+1) уравнений:
 , (3)
, (3)
где векторы
![]() ,
,![]() определяются из рекуррентного соотношения
определяются из рекуррентного соотношения
![]()
![]() , (4)
, (4)
Далее определяем
матрицу
![]() размера (n+1)x(n+1)
как матрицу, столбцами которой являются
векторы
размера (n+1)x(n+1)
как матрицу, столбцами которой являются
векторы![]() ,
,![]() .
.
![]() .
.
Тогда система (3) преобразуется к виду:
![]() ,
,
которое всегда
выполняется если матрица
![]() вырожденная или
вырожденная или![]() .
Считается, что УОП выполняются, если
.
Считается, что УОП выполняются, если![]() .
В противном случае из выражения для
.
В противном случае из выражения для![]() можно выделить такие ситуации:
можно выделить такие ситуации:
УОП не выполняется,
![]() –
–
– имеется конечное число особых траекторий.
УОП не выполняется,
![]() –
–
– определяем зависимости особого управления от переменных системы.
УОП не выполняется,
![]() ,
,
т.е. особая ситуация наблюдается при любых управлениях и оптимальное управление в задаче не единственное.
Рассмотрим пример.
Дан объект второго порядка
![]() ,
,
![]() ,
,
для которого
требуется найти такое управление
![]() ,
которое доставляет минимум функционалу:
,
которое доставляет минимум функционалу:
![]() ,
,
![]() – не задано.
– не задано.
В пространстве
![]() запишем
запишем
 ,
,
 .
.
По рекуррентному соотношению (4) вычисляем:
 .
.

Составляем матрицу
![]() .
.
 .
.
Определяем
![]() ,
откуда определяем особые управления
,
откуда определяем особые управления![]() .
.
Если провести
численный анализ траекторий под действием
управлений
![]() и
и![]() ,
то оптимальными будут последовательности
траекторий в зависимости от граничных
условий:
,
то оптимальными будут последовательности
траекторий в зависимости от граничных
условий:![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
.