

18.Взаимосвязанное частотное регулирование скорости ад
Простейший способ регулирования, когда
напряжение и частота на статоре связаны
друг с другом определённым соотношением:
![]()
К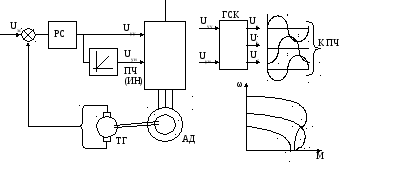 ритический
момент уменьшается из-за падения
напряжения в статоре на низких скоростях,
так как потокосцепления уменьшается.
ритический
момент уменьшается из-за падения
напряжения в статоре на низких скоростях,
так как потокосцепления уменьшается.
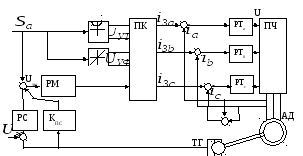
Система регулирования скорости с внутренним контуром регулирования момента (системы скалярного и полярного управления).
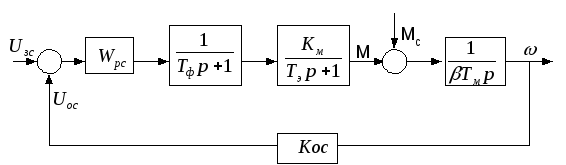
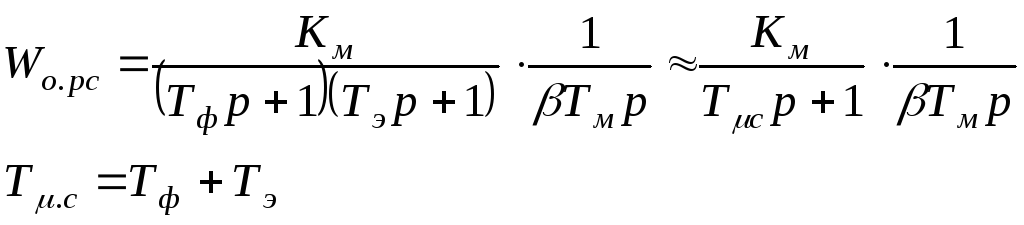
При оптимизации, при выборе
![]()

![]()
Для расширения диапазона регулирования и точности следует производить настройку контура на симметричный оптиум. При этом регулятор скорости будет пропорционально–интегральный(ПИ), или вводится второй контур регулирования скорости с пропорциональным регулятором(П).
В зависимости от регулятора скорости характеристики могут быть статические, если регулятор скорости пропорциональный; и характеристики могут быть астатическими если регулятор скорости пропорционально-интегральный.
19.Метод эквивалентных величин при выборе двигателей
В основу всех методов эквивалентирования
по теплу произвольных и номинальных
режимов лежит метод средних потерь. Так
как двигатели имеют большие ТМ,
то в течении цикла при выполнении условия
Тн>>Тц, максимальное
превышение температуры будет мало
отличаться от среднего и поэтому можно
считать, что![]()
![]()
Т
 огда
условие не превышения допустимой
температуры будет выглядеть:
огда
условие не превышения допустимой
температуры будет выглядеть:![]() –
не превышение средних потерь номинальными.
–
не превышение средних потерь номинальными.
![]()
Д ля
нахождения потерь при различной загрузке
двигателя можно воспользоваться
зависимостью
ля
нахождения потерь при различной загрузке
двигателя можно воспользоваться
зависимостью![]() :
:
![]()
При выполнении условия
![]()
температура двигателя не будет превосходить
допустимую.
Если имеется зависимость I=f(t), то можно воспользоваться методом эквивалентного тока:
Реальный ток заменяется эквивалентным, который постоянен Iэкв=constи выделяет такое количество тепла, что и реальный.

![]()
![]()
При постоянстве
![]() и неизменном сопротивлении силовой
цепи:
и неизменном сопротивлении силовой
цепи: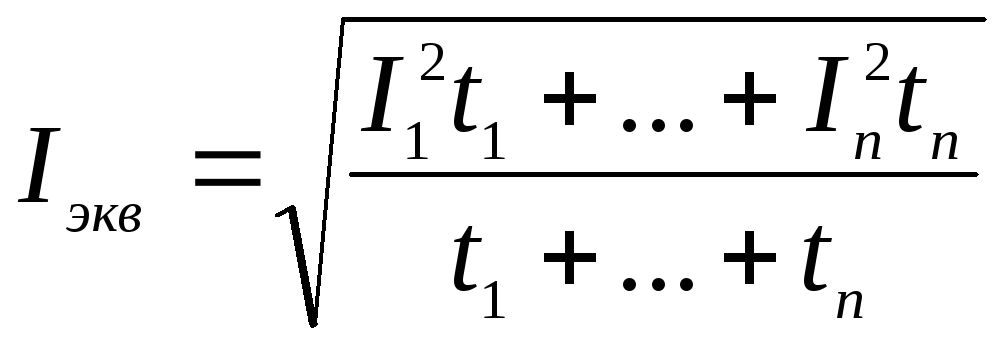 ;
;
Необходимо, что бы Iэкв ≤IН, но такой метод имеет ограничения:
1) Неизменность
![]() при работе на всех участках цикла.
при работе на всех участках цикла.
2) Сопротивление силовых цепей должно быть постоянно.
При наличии временной зависимости
![]() ,
в случае Ф=const,
,
в случае Ф=const,![]() ,
можно использовать метод эквивалентного
момента:
,
можно использовать метод эквивалентного
момента:
![]()
Если двигатель работает с постоянной скоростью, то можно применить метод эквивалентной мощности:
![]()
![]()

![]()
![]()
Если в процессе работы двигатель работает с переменной скоростью и двигатель самовентилируемый необходимо учитывать ухудшение теплоотдачи при работе двигателя на участках с пониженной скоростью:

![]() –
учитывает ухудшение теплоотдачи.
–
учитывает ухудшение теплоотдачи.