

3.7.3. Структура терминального мультиплексора для формирования stm-1 на основе потока е4
Структурная схема терминального мультиплексора формирования STM-1 на основе компонентного потока Е4 приведена на рис. 3.35.
Модуль HOI (Higher Order Interface) - интерфейс тракта высшего порядка, состоящий из трех функциональных блоков PPI, LPA. Я/Т (рис. 3.36).

Рис. 3.35. Структурная схема ТМ для формирования STM-1 на основе потока Е4
Блок PPI (Plesiochronous Physical Interface) - плезиохронный физический интерфейс, осуществляющий выделение тактовой частоты из потока Е4, декодирование соответствующего стыковочного кода и преобразование информационного сигнала в форму, необходимую для дальнейших преобразований, и передачу его в блок LP А.
При приеме осуществляются обратные преобразования с целью адаптации параметров плезиохронного цифрового потока к параметрам физической среды передачи электрического сигнала.
Блок LP A (Lower order Path Adaptation) - блок адаптации тракта низшего порядка, осуществляющего ввод входного сигнала в синхронный контейнер С4; при приеме блок выполняет обратную операцию.
Если сигнал на входе - плезиохронный, то блок LP А осуществляет также и операцию двустороннего выравнивания скоростей на уровне битов.
Блок HPT (Higher order Path Termination) - блок окончания (терминал) тракта высшего порядка, формирующий матрицу виртуального контейнера VC-4 путем добавления к информационной структуре контейнера С-4 девяти байтов трактового заголовка РОН. При приеме анализируется и интерпретируется заголовок РОН, пока не будет точно определен маршрут.
Модуль НРС (Higher Order Path Connection) - модуль подключения трактов высшего порядка, реализующий функцию подключения трактов высшего порядка, и состоит из единственной матрицы, которая дает возможности гибкого размещения виртуального контейнера VC-4 внутри цикла передачи STM-N (N = 4, 16).
Модуль HCS (Higher Order Connection Supervision) - модуль контроля подключения трактов высшего порядка и состоит из двух функциональных блоков: HUG и НРОМ.
Блок HUG (Higher order Unequipped Generator) - генератор загрузки тракта высшего порядка, который при отсутствии информационного потока в модуле НРС вырабатывает сигнал, имитирующий загрузку.
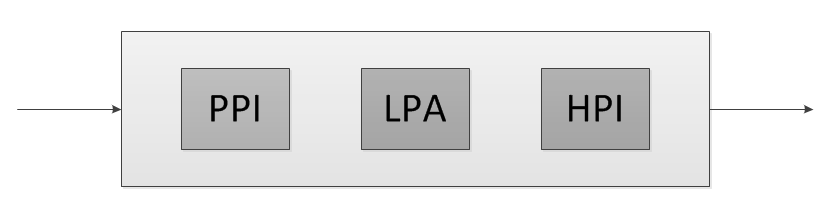
Рис. 3.36. Состав модуля HOI
Блок НРОМ (Higher order Path Overhead Monitor) - монитор заголовка тракта высшего порядка, который служит для проверки на приеме указания маршрута, содержащегося в заголовке РОН.
Модуль TTF (Transport Terminal Function) - модуль с функциями транспортного терминала, формирующего информационную структуру синхронного транспортного модуля соответствующего порядка STM-1. Модуль TTF состоит из пяти функциональных блоков: MSA, MSP, MST, RST и SPI (см. рис. 3.34). Назначение модуля, его состав аналогичны ранее рассмотренному модулю для формирования синхронного транспортного модуля на основе потоков Е1.
3.7.4. Управление в аппаратуре синхронной цифровой иерархии
Технология SDH предусматривает управление процессами формирования и передачи информационных потоков: виртуальных контейнеров и синхронных транспортных модулей. Обобщенная структурная схема управления приведена на рис. 3.37. Основными функциональными блоками оборудования управления являются:
Блок SEMF (Synchronous Equipment Management Function), выполняющий функции управления синхронным оборудованием. Его задачей является преобразование поступающей из аппаратуры сигнальной информации путем трансформации ее в сообщения об управлении в формате, требуемом для интерфейсов Q, F, DCC; и обратная задача - преобразование сообщений об управлении, исходящих от интерфейсов управления, в команды для аппаратуры.
Блок MCF (Message Communication Function), выполняющий функцию управления передачей сообщений между блоком SEMF и интерфейсами управления (Q, DCC, F), т.е. блок выполняет функцию маршрутизатора сообщений.
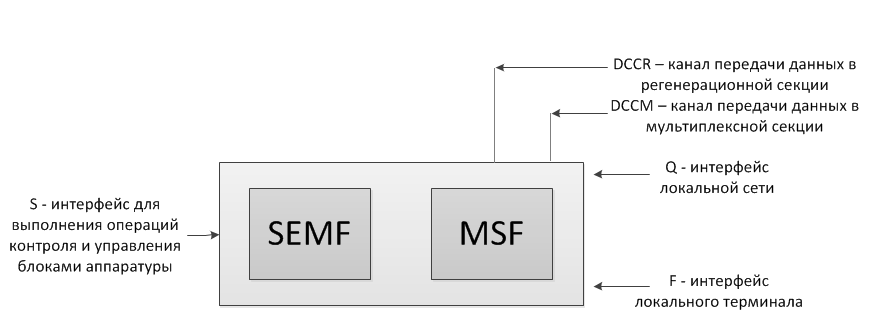
Рис. 3.37. Функциональная схема оборудования управления и контроля