

1.2. Работа постоянной силы
Рис.
2

![]() )
равна произведению ее составляющей F
на направление перемещения и величины
этого перемещения (рис. 3.18):
)
равна произведению ее составляющей F
на направление перемещения и величины
этого перемещения (рис. 3.18):
А=
F
![]() ,
,
![]() =S
, (1)
=S
, (1)
где F = F cos a,.
В векторном виде работа равна скалярному произведению вектора силы и вектора перемещения
![]() ,
(2)
,
(2)
где
![]() .
.
Согласно
(2) перемещение необязательно вызывается
действием силы, входящей в эту формулу.
Особенно это проявляется при нахождении
работы сил сопротивления и трения,
которые никак не способствуют перемещению
тела в заданном направлении при
![]()
0, Fсопр
0, Fтр
0.
0, Fсопр
0, Fтр
0.
Следовательно, работа силы совершается независимо от того, под действием каких причин тело совершает перемещение. Работа, как показывает практика, может быть положительной, отрицательной и равной нулю. Для выяснения этого воспользуемся формулой работы А = F Ds cosa.
1. Работа силы положительна (А > 0), если угол между векторами силы и перемещения острый: cos a > 0 (рис. 3, а).


Рис. 3
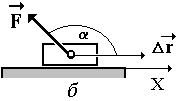
2. Работа силы отрицательна (А < 0), если угол тупой: cos 0 (рис. 3, б). 3. Работа силы равна нулю (А = 0).
При этом возможны 3 случая: а) F = 0, если на тело не действуют силы, но оно движется равномерно и прямолинейно, б) Dr = 0, тело не перемещается, несмотря на действие силы (F ¹ 0). Пусть на тело действуют какие-то другие силы; в) сила действует перпендикулярно к перемещению: cos a = 0, т. е. a = p/2 (рис. 3, в). Например, сила Кориолиса, сила Лоренца всегда перпендикулярны направлению перемещения.
В СИ работа измеряется в джоулях (Дж).
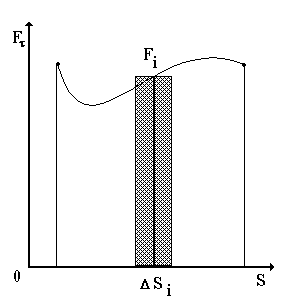
1.3. Работа переменой силы

Рис. 4
Любые элементарные перемещения (малые участки пути si) можно считать прямолинейными, в пределах их действующая сила остается постоянной, т. е.
Fi = const. На элементарном участке пути Dsi совершается элементарная работа: Аi = F si cos i.
Работа на конечном участке пути
 .
.
Для
нахождения полной работы на всём участке
пути перейдем к пределу, когда
![]() .
Тогда
.
Тогда
 (3)
(3)
или
при бесконечно малом перемещении
![]() м. т. под действием силы совершает
бесконечно малую работу (рис. 4,ds=dl):
м. т. под действием силы совершает
бесконечно малую работу (рис. 4,ds=dl):
![]() .
(4)
.
(4)
Поскольку работа не является функцией состояния системы, то она не может быть представлена в виде полного дифференциала, поэтому, вместo dA, будем использовать символ dА. Полная работа на участке 1 – 2
![]() .
(5)
.
(5)
Если
на тело одновременно действуют несколько
сил:
![]() ,
то полная работа равна алгебраической
сумме работ, совершаемых каждой силой
в отдельности:
,
то полная работа равна алгебраической
сумме работ, совершаемых каждой силой
в отдельности:
Рис.
5
![]() .
(6)
.
(6)
Работу можно найти графически (рис. 5), где она может быть представлена площадью криволинейной трапеции. В случае прямолинейного движения тела (в прямоугольных декартовых координатах), учитывая, что
![]()
где
![]() – единичные векторы осей Х, У,Z
соответственно, формулу (6) можно
представить в виде
– единичные векторы осей Х, У,Z
соответственно, формулу (6) можно
представить в виде
![]() =
=
= Fdxcos + Fdycos + Fdzcos = Fxdx + Fydy + Fzdz,
где
,
,
– углы, которые вектор силы составляет
с векторами
![]() ;
;
Fx
=
Fcos;
Fy
= Fcos;
Fz
= F
cos
– проекции
![]() на оси координат.
на оси координат.