

27.Скорость
При движении фигуры в плоскости положение её точек можно определить соотношением
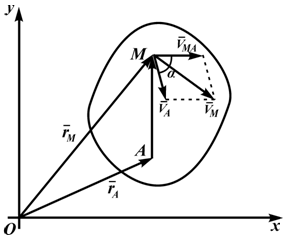
rM=rA+AM.
В данном случае точка A является полюсом. Скорость точки M
VM=VA+VMA .
Производная от вектора, постоянного по величине и переменного по направлению, есть вращательная скорость
![]()
Скорость точки в плоскопараллельном движении определяется как геометрическая сумма скорости полюса и скорости точки во вращательном движении фигуры вокруг полюса.
Численная величина скорости может быть найдена по теореме косинусов:
VM2=VA2+VMA2+2VA⋅VMAcosα (
или проецированием векторного равенства на оси координат:
VMx=VAx⊕VMAx, VMy=VAy⊕VMAy,
![]()
28. Работа силы тяжести.
Пусть точка М, на которую действует сила тяжести Р, перемещается из. положения М0(х0, у0, z0) в положение Мг(х1 у1 z1). Выберем координатные оси так, чтобы ось Oz была направлена вертикально вверх. Тогда Рх=0, Ру=0, Pz =-Р. Получим, учитывая, что переменным интегрирования является z
Если точка Мо выше М1 то z0—z1=h, где h — вертикальное перемещение точки; если же точка Мoниже точки M1, то z0—z1= —(z1—z0)=—h. Окончательно получаем
Следовательно, работа силы тяжести равна взятому со знаком плюс или минус произведению модуля силы на вертикальное перемещение точки ее приложения. Работа положительна, если начальная точка выше конечной, и отрицательна, если начальная точка ниже конечной. Из полученного результата следует, что работа силы тяжести не
зависит от вида той траектории, по которой перемещается точка ее приложения. Силы, обладающие таким свойством, называются потенциальными.
Работа силы .упругости. Рассмотрим груз М, лежащий на горизонтальной плоскости и прикрепленный к свободному концу некоторой пружины, а). На плоскости отметим точкой О положение, занимаемое концом пружины, когда она не
напряжена (АО=L0— длина ненапряженной пружины), и примем эту точку за начало координат. Если теперь оттянуть груз от равновесного положения О, растянув пружину до величиныL, то пружина получит удлинение λ=L—L0и на груз будет действовать
сила упругости F, направленная к точке О. Так как в нашем случае
λ=х, то F=cλ=c\x\ и Fx= —cx.
Последнее равенство справедливо и при x<0 (груз левее точки О); тогда сила F направлена вправо и получится, как и должно быть, Fx>0
Найдем работу, совершаемую силой упругости при перемещении груза из положения М0(х0) в положение M1(x1). Так как в данном случае Fx= -cx, Fy=Fz=0, то, подставляя эти значения в формулу работы, найдем

т. е. работа силы упругости равна половине произведения коэффициента жесткости на разность квадратов начального и конечного удлинений (или сжатий) пружины.