

page 354
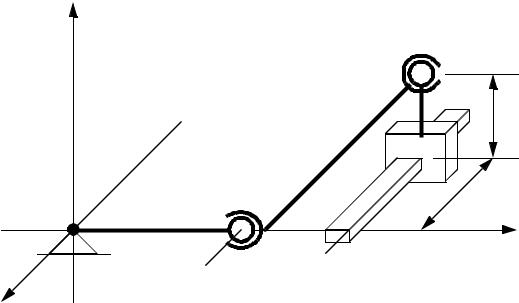
m = 6( n – 1) – 5j1 – 4j2 – 3j3 – 2j4 – j5
where,
m= mobility of the mechanism (d.o.f.)
n= number of links
j1, j2, … = the number of joints with 1, 2, ... dof respectively
• Consider the number of degrees of freedom in the linkage below,
|
y |
|
|
|
|
|
|
|
C |
|
|
|
|
3” |
|
|
|
|
D |
A |
|
B |
|
40” |
6” |
|
E |
||
|
x |
|||
|
|
|||
|
|
|
|
|
|
|
|
10” |
|
z |
|
|
|
|
12.2 HOMOGENEOUS MATRICES
• This method still uses geometry to determine the position of the robot, but it is put into an
ordered method using matrices.
page 355
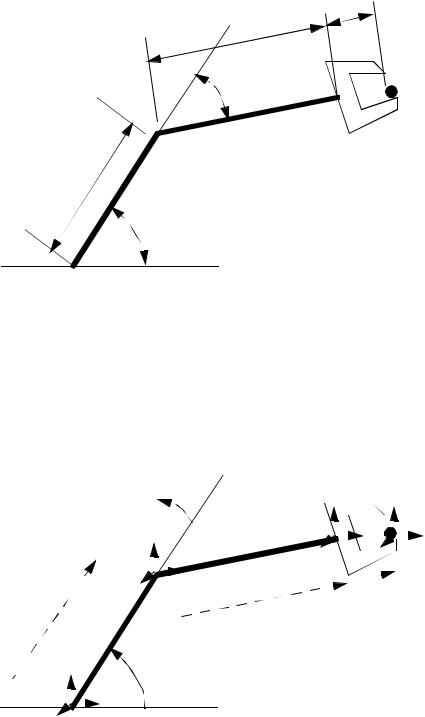
• Consider the planar robot below,
|
0.2m |
|
1m |
θ 2 |
TCP |
(xT, yT) |
1m (x1,y1)
θ 1
(xb, yb) 
•The basic approach to this method is,
1.On the base, each joint, and the tool of the robot, attach a reference frame (most often x- y-z). Note that the last point is labels ‘T’ for tool. This will be a convention that I will generally follow.
|
|
|
θ 2 |
|
|
y |
|
y |
F |
T |
|||
|
|
|
|
|
|
|
F2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
y |
|
|
|
xz |
|
x |
|||
|
|
|
|
|
|
|
|||||||
|
|
|
F1 |
|
z |
|
|
|
|||||
|
|
|
|
|
x |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
T0, 1 |
z |
T2, T |
|
|
|||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
T1, 2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
F0 |
y |
θ 1 |
|
|
|
|
|
|
|
|
|||
|
|
x |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
z |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
2. Determine a transformation matrix to map between each frame. It is important to do this
page 356
by assuming the joints are in their 0 joint positions. Put the joint positions in as variables.
T0, 1 = |
|
|
|
T1, 2 = |
|
|
|
T2, T = |
|
|
|
|
|
|
|
|
|
1 0 0 ∆ x
trans( ∆ x, ∆ y, ∆ z) = 0 1 0 ∆ y
0 0 1 ∆ z
0 0 0 1
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
|
0 |
|
0 |
||
rot( x, θ ) |
= |
0 |
cos θ |
sin θ |
0 |
||||
0 |
– sin θ |
cos θ |
0 |
||||||
|
|
||||||||
|
|
0 |
0 |
|
0 |
|
1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
cos θ 0 – sin θ 0 |
|||||||
rot( y, θ ) = |
|
0 |
1 |
0 |
|
0 |
|||
|
|
sin θ |
0 |
cos θ |
0 |
||||
|
|
|
0 |
0 |
0 |
|
1 |
||
|
|
cos θ |
sin θ |
|
|
|
|||
|
|
0 |
0 |
||||||
rot( z, θ ) |
= |
– sin θ |
cos θ |
0 |
0 |
||||
|
0 |
|
0 |
1 |
0 |
||||
|
|
|
|
||||||
|
|
|
0 |
|
0 |
0 |
1 |
||
|
|
|
|
|
|
|
|
|
|
page 357
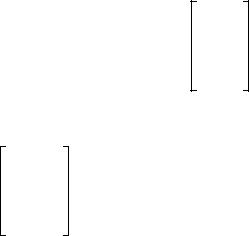
ASIDE: The structure of these matrices describe the position (P) and orientation
of the x (N), y (O), z (A), axes.
|
|
|
|
|
|
y (O) |
|
|
|
|
|
NX OX AX PX |
|
|
|
|
|||||||
|
|
|
|
|
|
||||||
NY OY AY PY |
|
|
|
|
|
|
|||||
NZ OZ AZ PZ |
|
|
|
|
|
|
|||||
|
|
|
P |
x (N) |
|||||||
|
|
|
|||||||||
0 |
0 |
0 |
1 |
|
z (A) |
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
cos θ |
|
|
sin θ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
1 |
|
1 |
0 |
0 |
|
1 |
0 |
0 |
1 |
|
|
|
||||||||
T0, 1 |
= |
– sin θ |
1 |
cos θ 1 0 0 |
|
0 |
1 |
0 |
0 |
|
= rot( z, θ |
1) trans( 1, 0, 0) |
||||||||||||
|
|
|
|
|
0 |
|
|
0 |
|
1 |
0 |
|
0 |
0 |
1 |
0 |
|
|
|
|||||
|
|
|
|
|
0 |
|
|
0 |
|
0 |
1 |
|
0 |
0 |
0 |
1 |
|
|
|
|||||
|
|
|
|
cos θ |
|
|
sin θ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
2 |
|
2 |
0 |
0 |
|
1 |
0 |
0 |
1 |
|
|
|
||||||||
T1, 2 |
= |
– sin θ |
2 |
cos θ 2 0 0 |
|
0 |
1 |
0 |
0 |
|
= rot( z, θ |
2) trans( 1, 0, 0) |
||||||||||||
|
|
|
|
|
0 |
|
|
0 |
|
1 |
0 |
|
0 |
0 |
1 |
0 |
|
|
|
|||||
|
|
|
|
|
0 |
|
|
0 |
|
0 |
1 |
|
0 |
0 |
0 |
1 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1 |
0 |
0 |
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
T2, T |
= |
0 |
1 |
0 |
|
0 |
|
|
= trans( 0.2, 0, 0) |
|
|
|||||||||||||
0 |
0 |
1 |
|
0 |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
0 |
0 |
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. Multiply the frames to get a complete transformation matrix.
page 358
T0, T = T0, 1T1, 2T2, T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
cos θ |
1 |
sin θ |
1 |
0 0 |
|
|
1 0 0 1 |
|
|
|
|
|
cos θ 2 |
sin θ 2 0 0 |
|
|
1 0 0 1 |
|
|
1 0 0 0.2 |
||||||||||||||||||||||||||
T0, T |
= |
|
– sin θ 1 |
cos θ 1 0 0 |
|
0 1 0 0 |
|
|
|
|
– sin θ |
2 |
cos θ 2 0 0 |
|
|
0 1 0 0 |
|
|
0 1 0 |
0 |
|
|||||||||||||||||||||||||||||
|
|
|
0 |
|
0 |
|
1 0 |
|
|
0 0 1 0 |
|
|
|
|
|
|
0 |
|
|
0 |
1 0 |
|
|
|
0 0 1 0 |
|
|
0 0 1 |
0 |
|
||||||||||||||||||||
|
|
|
0 |
|
0 |
|
0 1 |
|
|
0 0 0 1 |
|
|
|
|
|
|
0 |
|
|
0 |
0 1 |
|
|
|
0 0 0 1 |
|
|
0 0 0 |
1 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos θ |
|
sin θ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos θ |
|
sin θ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
1 |
1 |
0 0 |
|
|
1 0 0 1 |
|
|
|
|
|
2 |
2 0 0 |
|
|
|
1 0 0 1.2 |
|
|
|
|
||||||||||||||||||||||||||
T0, T |
= |
|
– sin θ |
1 |
cos θ |
1 0 0 |
|
|
0 1 0 0 |
|
|
|
|
– sin θ 2 |
cos θ 2 0 0 |
|
|
0 1 0 |
|
0 |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
0 |
|
0 |
|
1 0 |
|
|
0 0 1 0 |
|
|
|
|
|
|
|
0 |
|
|
0 |
1 0 |
|
|
|
0 0 1 |
|
0 |
|
|
|
|
|
|||||||||||||||||
|
|
|
0 |
|
0 |
|
0 1 |
|
|
0 0 0 1 |
|
|
|
|
|
|
|
0 |
|
|
0 |
0 1 |
|
|
|
0 0 0 |
|
1 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos θ 1 |
sin θ 1 |
|
|
|
|
|
|
|
|
|
|
|
|
cos θ |
|
|
sin θ |
2 0 1.2 cos θ |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
0 0 |
|
1 0 0 1 |
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
T0, T |
= |
|
– sin θ |
1 |
cos θ 1 0 0 |
|
0 1 0 0 |
|
|
|
|
– sin θ |
2 |
cos θ |
2 0 –1.2 sin θ |
2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
0 |
|
0 |
|
1 0 |
|
0 0 1 0 |
|
|
|
|
|
|
|
|
0 |
|
|
0 |
1 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
0 |
|
0 |
|
0 1 |
|
0 0 0 1 |
|
|
|
|
|
|
|
|
0 |
|
|
0 |
0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
cos θ |
1 |
sin θ |
1 |
0 0 |
|
|
cos θ |
2 |
|
|
|
sin θ |
2 |
0 |
1.2 cos θ 2 + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
T0, T |
= |
|
– sin θ |
1 |
cos θ |
1 0 0 |
|
|
– sin θ |
2 |
|
|
cos θ |
2 0 |
|
–1.2 sin θ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
0 |
|
0 |
|
1 0 |
|
|
0 |
|
|
|
|
|
0 |
|
1 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
0 |
|
0 |
|
0 1 |
|
|
0 |
|
|
|
|
|
0 |
|
0 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
complete the multiplication |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
and simplify to get...... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Orientation |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Position |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
cos ( θ |
1 + θ |
2) |
sin ( θ 1 + θ 2) |
|
|
|
0 cos θ |
1 + 1.2 cos ( θ |
1 + θ 2) |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
T0, T = |
|
– sin ( θ |
1 + θ 2) cos ( θ 1 + θ 2) |
0 |
sin θ |
1 + 1.2 sin ( θ |
1 + θ 2) |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
1 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
• The position and orientation can be read directly from the homogenous transformation
matrix as indicated above.