

 θ
θ  θ
θ 
page 377
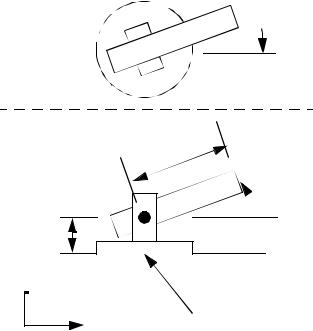
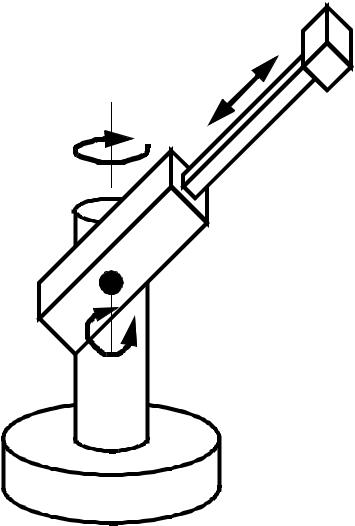
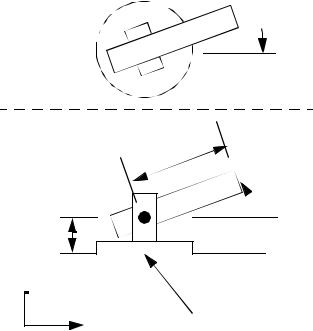
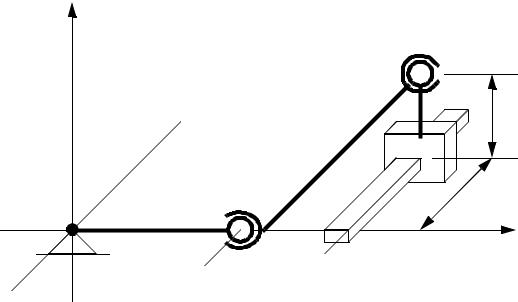
3. Robotics and Automated Manipulators (RAM) has consulted you about a new robotic manipulator. This work will include kinematic analysis, gears, and the tool. The robot is pictured below. The robot is shown on the next page in the undeformed position. The tool is a gripper (finger) type mechanism.
Tool
The robot is drawn below in the undeformed position. The three positioning joints are shown, and a frame at the base and tool are also shown.


 y
ypage 379
b)As normal, you decide to relate a cartesian (x-y) velocity of the gripper to joint velocities. Set up the calculation steps needed to do this based on the results in question #1.
c)To drive the revolute joints RAM has already selected two similar motors that have a maximum velocity. You decide to use the equations in question #2, with maximum specified tool velocities to find maximum joint velocities. Assume that helical gears are to be used to drive the revolute joints, specify the basic dimensions (such as base circle dia.). List the steps to develop the geometry of the gears, including equations.
d)The gripper fingers may close quickly, and as a result a dynamic analysis is deemed necessary. List the steps required to do an analysis (including equations) to find the dynamic forces on the fingers.
e)The idea of using a cam as an alternate mechanism is being considered. Develop a design that is equivalent to the previous design. Sketch the mechanism and a detailed displacement graph of the cam.
f)The sliding joint ‘r’ has not been designed yet. RAM wants to drive the linear motion, without using a cylinder. Suggest a reasonable design, and sketch.
4.For an articulated robot, find the forward, and inverse kinematics using geometry, homogenous matrices, and Denavit-Hartenberg transformations.
5.Assign Denavit-Hartenberg link parameters to an articulated robot.
 θ
θ  θ
θ 
page 381
 Pw(x, y)
Pw(x, y)
L2 = 10” |
theta2 = 45 deg. |
|
L1 = 12” |
y |
x
theta1 = 30 deg.
a)For the robot described in question 1 determine the inverse kinematics for the robot. (i.e., given the position of the tool, determine the joint angles of the robot.) Keep in mind that in this case the solution will have two different cases. Determine two different sets of joint angles required to position the TCP at x=5”, y=6”.
b)For the inverse kinematics of question #2, what conditions would indicate the robot position is unreachable? Are there any other cases that are indeterminate?
8 Find the dynamic forces in the system below,
page 382
y |
AB rotates 20rad/s c.c.w. in the |
|
|
xy plane, there are ball joints |
|
|
at B and C, and the collar at D |
C |
|
slides along the prismatic |
|
|
shaft. What are the positions, |
|
|
velocities and accelerations of |
|
|
the links? |
3” |
|
|
D |
A |
|
B |
|
|
40” |
6” |
|
|
E |
||
|
|
x |
|||
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
10”
z
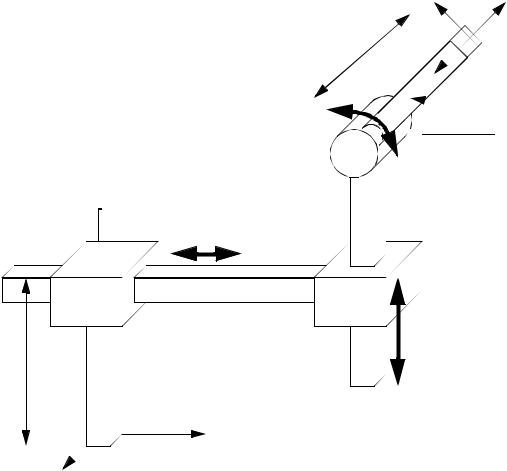
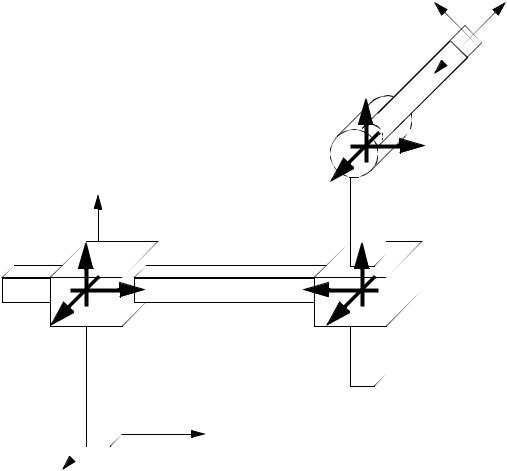
9.Examine the robot figure below and,
a) assign frames to the appropriate joints.
page 383
x |
z |
L4
y
 θ 1
θ 1
y
l2
l3
L1
x
z


page 386
ans. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
∂ x ∂ x |
|
|
d |
|
|
|
|
|
|
|
|
|
d |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
----x |
|
∂ r ∂ θ |
|
|
----r |
|
cos ( θ ) |
–r sin ( θ ) |
|
|
|
----r |
|||||||||
|
dt |
= |
|
|
dt |
|
|
= |
|
|
|
dt |
|
|
||||||||
|
|
d |
|
∂ y ∂ y |
|
|
d |
θ |
|
|
sin ( θ ) |
r cos ( θ ) |
|
|
|
d |
θ |
|||||
|
----y |
|
|
---- |
|
|
|
|
|
|
---- |
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
dt |
|
∂ r ∂ θ |
|
dt |
|
|
|
|
|
|
|
|
dt |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b) Given the joint positions, find the forward and inverse Jacobian matrices.
θ = 30° |
r = 3in |
ans. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos ( 30° ) |
–3 sin ( 30° ) |
|
|
0.866 |
–1.5 |
||||||||
J = |
|
|
|
= |
||||||||||||
|
|
|
|
|
sin ( 30° ) |
3 cos ( 30° ) |
|
|
0.5 |
2.598 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
–1 |
= |
|
|
0.866 |
0.5 |
|
|
|
|
|
|
|
|
||
|
|
|
–0.167 0.289 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c) If we are at the position below, and want to move the tool at the given speed, what joint
velocities are required?
d |
in |
d |
in |
----x = –1---- |
----y = 2---- |
||
dt |
s |
dt |
s |
ans. |
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
----r |
|
0.866 0.5 |
|
|
–1 |
|
0.134 |
|||||||
|
|
dt |
|
|
= |
|
|
= |
||||||||
|
|
d |
|
–0.167 0.289 |
|
2 |
|
0.745 |
||||||||
|
|
θ |
|
|
|
|
||||||||||
|
---- |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11. Examine the robot figure below and,
a) assign frames to the appropriate joints.

page 387
|
|
|
θ |
1 |
|
|
|
x0 |
|
|
xT |
|
|
|
a |
|
|
|
|
|
|
|
|
|
z0 |
|
|
|
zT |
|
|
|
|
|
yT |
|
|
|
|
θ |
yT |
|
|
|
|
2 |
|
|
|
|
|
|
zT |
|
|
|
|
|
xT |
c |
|
b |
r |
|
|
|
y0 |
x0 |
|
|
y0 |
|
|
|
|
z0 |
b)list the transformations for the forward kinematics.
c)expand the transformations to matrices (do not multiply).
12. Given the transformation matrix below for a polar robot,
|
|
cos ( θ 1 + θ 2) |
sin ( θ 1 + θ 2) |
0 |
cos θ |
1 |
+ 1.2 cos ( θ |
1 + θ |
2) |
T0, T = |
– sin ( θ 1 + θ 2) |
cos ( θ 1 + θ 2) |
0 |
sin θ |
1 |
+ 1.2 sin ( θ |
1 + θ |
2) |
|
|
0 |
0 |
1 |
|
|
0 |
|
|
|
|
|
0 |
0 |
0 |
|
|
1 |
|
|
a)find the Jacobian matrix.
b)Given the joint positions, find the forward and inverse Jacobian matrices.
θ 1 = 30° |
θ 1 = 40° |
c) If we are at the position below, and want to move the tool at the given speed, what joint velocities are required?

page 388
d |
in |
d |
in |
----x = –1---- |
----y = 2---- |
||
dt |
s |
dt |
s |
13. Find the forward kinematics for the robots below using homogeneous and DenavitHartenberg matrices.
y |
y |
y |
|
x |
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
x |
||
|
|
|
|
|
|
|
|||
y |
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
x |
|
|
x |
|
|
||||
14. Use the equations below to find the inverse Jacobian. Use the inverse Jacobian to find the joint velocities required at t=0.5s.
x |
= |
4 cos ( θ |
1) |
+ 6 cos ( θ 1 + θ 2) |
in. |
y |
= |
4 sin ( θ |
1) |
+ 6 sin ( θ 1 + θ 2) |
in. |

page 389
ANS.
First, find tool and joint positions, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
P( 0.5) |
= |
|
3 |
|
+ ( – 2t3 + 3t2) |
5 |
|
= |
|
5.5 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
2 |
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
= |
|
5.5 |
2 |
+ 6 |
2 |
|
|
α |
= |
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
atan |
------ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.5 |
|
|
|
|
|
|
|
|
|
r2 – ( 42 + 62) |
|||||
|
2 |
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
· |
2) |
· |
θ |
|
|
|
|
|
|||||||||
r |
|
= 4 |
|
+ 6 |
|
|
– 2( 4) ( 6) cos ( 180 – θ |
|
2 |
= 180 – acos --------------------------------–2( 4) ( 6) |
|
|||||||||||||||||||||||||||
sin ( θ |
1 – α ) |
= |
|
sin ( 180 – θ 2) |
|
|
|
|
|
|
|
|
· |
θ |
1 |
= asin |
|
6 sin ( 180 – θ 2) |
+ α |
|
||||||||||||||||||
--------------------------- |
|
|
|
|
6 |
|
|
|
|
-------------------------------- |
|
|
r |
|
|
|
|
|
|
|
|
|
|
------------------------------------r |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Next, the Jacobian, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
J |
= |
|
– 4 sin ( θ |
1) |
|
– 6 sin ( θ |
1 + θ 2) |
–6 sin ( θ |
1 + θ 2) |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
4 cos ( θ |
1) |
+ 6 cos ( θ |
1 + θ |
2) |
6 cos ( θ |
1 + θ |
2) |
|
|
|
|
|
|
|
||||||||||||||||||
Substitute and solve |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
d |
|
θ |
1 |
|
= |
J |
–1 |
|
7.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
---- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
dt |
|
θ 2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|