


page 445
24.5 FUNCTION REFERENCE
•The following function descriptions are for both the micrologix (500/1000) and PLC-5 processor families.
•Note that floating point operations are not available on the micrologix.
•Some of the flags referred to functions are:
S2:0/0 carry in math operation
S2:0/1 overflow in math operation
S2:0/2 zero in math operation
S2:0/3 sign in math operation
GENERAL FUNCTIONS
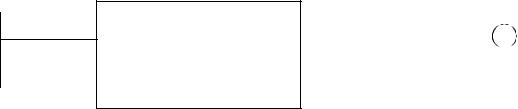
AFI - Always False Instruction
|
|
|
|
|
AFI |
|
|
|
|
||
|
|
|
|
|
|
|
|
Description: |
Putting this instruction in a line will force the line to be false. This is prima- |
||
|
rily designed for debugging programs. |
||
Status Bits: |
none |
||
Registers: |
none |
||
Available on: Micrologix, PLC-5

page 446
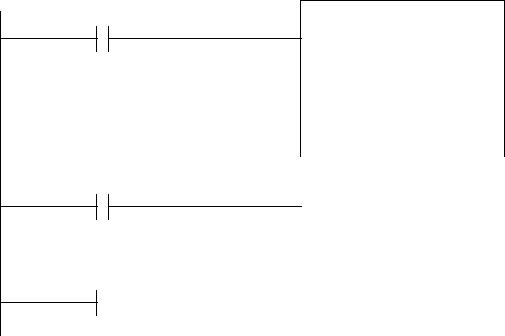
MCR - Master Control Relay
|
A |
|
|
|
|
MCR |
||
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
MCR |
|
|
|
|
|
|
|
|
||
|
Description: |
MCR instructions need to be used in pairs. If the first MCR line is true the |
||||||
|
|
|
instructions up to the next MCR will be examined normally. If the first |
|||||
|
|
|
MCR line is not true the outputs on the lines after will be FORCED |
|||||
|
|
|
OFF. Be careful when using normal outputs in these blocks. |
|||||
|
Status Bits: |
none |
|
|
|
|
|
|
|
Registers: |
none |
|
|
|
|
|
|
|
Available on: Micrologix, PLC-5 |
|
|
|
||||
TIMERS |
|
|
|
|
|
|
||
|
TON - Timer ON |
|
|
|
|
|
||
|
|
A |
|
|
TON |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
TIMER ON DELAY |
|
||
|
|
|
|
|||||
|
|
|
|
|
Timer |
T4:0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
Time Base |
1.0 |
|
|
|
|
|
|
|
Preset |
10 |
|
|
|
|
|
|
|||||
|
|
|
|
|
Accum. |
0 |
|
|
|
Description: |
This timer will delay turning on, but will turn off immediately. Once the |
||||||
|
|
|
input turns on the accumulated value (ACC) will start to increase from |
|||||
|
|
|
zero. When the preset (PRE) value is reached the DN bit is set. The done |
|||||
|
|
|
bit will turn off and the accumulator will reset to zero if the input goes |
|||||
|
|
|
false. |
|
|
|
|
|
|
Status Bits: |
EN |
This bit is true while the input to the timer is true |
|||||
|
|
|
TT |
This bit is true while the accumulator value is increasing |
||||
|
|
|
DN |
This bit is true when the accumulator value is equal to the preset |
||||
|
|
|
|
value |
|
|
|
|
|
Registers: |
ACC |
The time that has passed since the input went true |
|||||
|
|
|
PRE |
The maximum time delay before the timer goes on |
||||
Available on: Micrologix, PLC-5
page 447
TOF - Timer OFf |
|
|
|||
|
|
A |
TOF |
|
|
|
|
||||
|
|
|
|
TIMER OFF DELAY |
|
|
|
|
|
||
|
|
|
|
Timer |
T4:0 |
|
|
|
|
||
|
|
|
|
Time Base |
1.0 |
|
|
|
|
Preset |
10 |
|
|
|
|
||
|
|
|
|
Accum. |
0 |
Description: |
This timer will delay turning off (the done bit, DN, will turn on immedi- |
|
|
ately). Once the input turns off the accumulated value (ACC) will start |
|
|
to increase from zero. When the preset (PRE) value is reached the DN |
|
|
bit is turned off and the accumulator will reset to zero. If the input turns |
|
|
on before the off delay is complete the accumulator will reset to zero. |
|
Status Bits: |
EN |
This bit is true while the input to the timer is true |
|
TT |
This bit is true while the accumulator value is increasing |
|
DN |
This bit is true when the accumulator value is less than the preset |
|
|
value and the input is true, or the accumulator is changing |
Registers: |
ACC |
The time that has passed since the input went false |
|
PRE |
The maximum time delay before the timer goes off |
Available on: Micrologix, PLC-5
page 448
RTO - RetentiveTimer On |
|
|
|||
|
|
A |
RTO |
|
|
|
|
||||
|
|
|
|
RETENTIVE TIMER ON |
|
|
|
|
|
||
|
|
|
|
Timer |
T4:0 |
|
|
|
|
||
|
|
|
|
Time Base |
1.0 |
|
|
|
|
Preset |
10 |
|
|
|
|
||
|
|
|
|
Accum. |
0 |
Description: |
This timer will delay turning on. When the input turns on the accumulated |
|
|
value (ACC) will start to increase from zero. When the preset (PRE) |
|
|
value is reached the DN bit is set. If the input goes false the accumulator |
|
|
value is not reset to zero. To reset the timer and turn off the timer the |
|
|
RES instruction should be used. |
|
Status Bits: |
EN |
This bit is true while the input to the timer is true |
|
TT |
This bit is true while the accumulator value is increasing |
|
DN |
This bit is true when the accumulator value is less than the preset |
|
|
value |
Registers: |
ACC |
The time that has passed since the input went true |
|
PRE |
The maximum time delay before the timer goes on |
Available on: Micrologix, PLC-5
COUNTERS
• Counter memory instructions can share the same memory location, so some redundant bits are mentioned here.
page 449
CTU - CounT Up |
|
|
|||
|
|
A |
CTU |
|
|
|
|
||||
|
|
|
|
COUNT UP |
|
|
|
|
|
|
|
|
|
|
|
Counter |
C5:0 |
|
|
|
|
||
|
|
|
|
Preset |
50 |
|
|
|
|
Accum. |
0 |
|
|
|
|
||
|
|
|
|
|
|
Description: |
The counter accumulator will increase once each time the input goes from |
|
|
false to true. If the accumulator value reaches the preset the done bit, |
|
|
DN, will be set. The accumulator value will still increase even when the |
|
|
done bit is set |
|
Status Bits: |
CU |
Will be true when the input is true |
|
CD |
Not used for this instruction |
|
DN |
Will be set when ACC >= PRE |
|
OV |
Will be set if the counter value has gone above 32,767 |
|
UN |
Not used for this instruction |
Registers: |
ACC |
The total count |
|
PRE |
The maximum count before the counter goes on |
Available on: Micrologix, PLC-5

page 452
EQU, GEQ, GRT, LEQ, LES, NEQ
|
EQU |
|
|
A |
|
|
|
||
|
EQUALS |
|
|
|
|
Source A |
N7:0 |
|
|
|
|
|||
|
Source B |
N7:1 |
|
|
|
|
|
|
|
|
|
|
|
|
Description: |
The basic compare has six variations. Each of these will look at the val- |
|
ues in source A and B and check for the comparison case. If the com- |
|
parison case is true, the output will be true. The types are, |
|
EQU - Equals |
|
GEQ - Greater than or equals |
|
GRT - Greater than |
|
LEQ - Less than or equals |
|
LES - Less than |
|
NEQ - Not equal |
Status Bits: |
none |
Registers: none
Available on: Micrologix, PLC-5
CALCULATION
page 453
ACS, ASN, ATN, COS, LN, LOG, NEG, SIN, SQR, TAN |
|
||||
|
|
|
|
|
|
|
|
A |
|
ACS |
|
|
|
||||
|
|
|
|
ARCCOSINE |
|
|
|
|
|
||
|
|
|
|
Source |
N7:0 |
|
|
|
|
||
|
|
|
|
Dest |
N7:1 |
|
|
|
|
|
|
Description: |
These are unary math functions that will load a value from the source, do |
|
|
|
the calculation indicated, and store the results in the destination. Func- |
|
|
tions possible include |
|
ACS - Arccosine (inverse cosine) in radians |
|
|
ASN - Arcsine (inverse sine) in radians |
|
|
ATN - Arctangent (inverse tangent) in radians |
|
|
COS - Cosine using radians |
|
|
LN - Natural Logarithm |
|
|
LOG - Base 10 logarithm |
|
|
NEG - Sign change from positive to negative, or reverse |
|
|
SIN - Sine using radians |
|
|
SQR - Square root |
|
|
TAN - Tangent using radians |
|
Status Bits: |
C |
Carry - set if a carry is generated |
|
V |
Overflow - only set if value exceeds maximum for number type |
|
Z |
Zero - sets if the result is zero. |
|
S |
Sign - set if result is negative |
Registers: none
Available on: Micrologix, PLC-5
page 454
ADD, DIV, MUL, SUB, XPY |
|
|
|||
|
|
|
|
|
|
|
|
A |
ADD |
|
|
|
|
||||
|
|
|
|
ADD |
|
|
|
|
|
|
|
|
|
|
|
Source A |
N7:0 |
|
|
|
|
||
|
|
|
|
Source B |
N7:1 |
|
|
|
|
Dest |
N7:2 |
|
|
|
|
||
|
|
|
|
|
|
Description: |
These are binary math functions that will load two values from sources A |
|
|
|
and B, do the calculation indicated, and store the results in the destina- |
|
|
tion. Functions possible include |
|
ADD - Add two numbers |
|
|
DIV - Divide source A by source B |
|
|
MUL - Multiply A and B |
|
|
SUB - Subtract B from A |
|
|
XPY - Raise X to the power of Y |
|
Status Bits: |
C |
Carry - sets if a carry is generated |
|
V |
Overflow - only set if value exceeds maximum for number type |
|
Z |
Zero - sets if the result is zero. |
|
S |
Sign - sets if the result is negative |
Registers: none
Available on: Micrologix, PLC-5


page 457
CPT - ComPuTe |
|
|
|
||
|
|
A |
|
CPT |
|
|
|
||||
|
|
|
|
COMPUTE |
|
|
|
|
|
||
|
|
|
|
Dest |
N7:0 |
|
|
|
|
||
|
|
|
|
Expression |
|
|
|
|
|
“N7:1 - N7:3” |
|
|
|
|
|
||
|
|
|
|
|
|
|
Description: |
This expression allows free-form entry of equations. A maximum of 80 |
|||||
|
|
|
|
characters is permitted. Operations allowed include +, -, | (divide), *, |
|||
|
|
|
|
FRD, BCD, SQR, AND, OR, NOT, XOR, ** (x**y = x to power y), |
|||
|
|
|
|
RAD, DEG, LOG, LN, SIN, COS, TAN, ASN, ACS, ATN |
|||
|
Status Bits: |
none |
|
|
|||
|
Registers: |
none |
|
|
|||
|
Available on: PLC-5 |
|
|
||||
LOGICAL |
|
|
|
|
|
||
|
AND, OR, XOR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
AND |
|
|
|
|
|
|
||||
|
|
|
|
|
BITWISE AND |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Source A |
N7:0 |
|
|
|
|
|
|
|||
|
|
|
|
|
Source B |
N7:1 |
|
|
|
|
|
|
Dest |
N7:2 |
|
|
Description: |
|
|||||
|
|
|
|
||||
|
These functions do basic boolean operations to the numbers in locations |
||||||
|
|
|
|
A and B. The results of the operation are stored in Dest. These calcu- |
|||
|
|
|
|
lations will be perform whenever the input is true. The functions are, |
|||
|
|
|
AND - Bitwise and |
|
|
||
|
|
|
OR - Bitwise or |
|
|
||
|
|
|
XOR - Bitwise exclusive or |
|
|
||
|
Status Bits: |
C |
Carry - always 0 |
|
|
||
|
|
|
V |
Overflow - always 0 |
|
|
|
|
|
|
Z |
Zero - sets if the result is zero. |
|
|
|
|
|
|
S |
Sign - sets if the MSB of the result is set |
|||
Registers: none
Available on: Micrologix, PLC-5




page 462
DTR - Data TRansition |
|
|
|
||
|
|
|
|
|
|
|
|
DTR |
|
|
|
|
|
|
|
||
|
|
DATA TRANSITION |
|
A |
|
|
|
Source |
N7:0 |
|
|
|
|
Mask |
00FF |
|
|
|
|
Reference |
N7:1 |
|
|
|
|
|
|||
|
|
|
|
|
|
Description: |
This function will examine the source value and mask out bits using the |
|
mask. The value will be compared to the Reference value, and if the |
|
values agree, then the function will be true for one scan, after that it ill |
|
be false. |
Status Bits: |
none |
Registers: none
Available on: Micrologix, PLC-5
SHIFT REGISTER
BSL, BSR |
|
|
|
||
|
|
A |
|
BSL |
|
|
|
||||
|
|
|
|
BIT SHIFT LEFT |
|
|
|
|
|||
|
|
|
|
File |
#B3:0 |
|
|
|
|
||
|
|
|
|
Control |
R6:0 |
|
|
|
|
Bit Address |
I:0.0/0 |
|
|
|
|||
|
|
|
|
Length |
6 |
Description: |
These functions will shift bits through left or right through a string of bits |
|
|
starting at #B3:0 with a length of 6 in the example above. As the bits |
|
|
shift the bit shifted out will be put in the UL bit. A new bit will be |
|
|
shifted into the vacant spot from the Bit Address. When the bits are |
|
|
shifted they are moved in the memory locations starting at file #B3:0. |
|
|
The two options available are: |
|
|
BSR - Bit Shift Right |
|
|
BSL - Bit Shift Left |
|
Status Bits: |
EN |
Enable - is on when the input to the function is on |
|
DN |
Done - is on when the shift operation is complete |
|
ER |
Error - indicates when an error has occurred |
|
UL |
Unload - the unloaded value is stored in this bit |
Registers: |
none |
|
Available on: Micrologix, PLC-5
page 463
FFL, FFU, LFL, LFU |
|
|
|||
|
|
A |
FFL |
|
|
|
|
||||
|
|
|
|
FIFO LOAD |
|
|
|
|
|
|
|
|
|
|
|
Source |
N7:0 |
|
|
|
|
||
|
|
|
|
FIFO |
N7:10 |
|
|
|
|
Control |
R6:0 |
|
|
|
|
Length |
10 |
|
|
|
|
Position |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
FFU |
|
|
|
|
|
|
FIFO UNLOAD |
|
|
|
|
|
|
|
|
|
|
|
FIFO |
N7:10 |
|
|
|
|
Dest |
N7:11 |
|
|
|
|
Control |
R6:0 |
|
|
|
|
Length |
10 |
|
|
|
|
||
|
|
|
|
Position |
0 |
|
|
|
|
|
|
Description: |
Stack instructions will take integer words and store them, and then allow |
|
|
later retrieval. The load instructions will store a value on the stack on a |
|
|
false to true input change. The Unload instructions will remove a |
|
|
value from that stack and store it in the Dest location. A Last On First |
|
|
Off stack will return the last value pushed on. A First On First Off |
|
|
stack will give the oldest value on the stack. If an attempt to load more |
|
|
than the stack length, the values will be ignored. The instructions |
|
|
available are: |
|
|
FFL - FIFO stack load |
|
|
FFU - FIFO stack unload |
|
|
LFL - LIFO stack load |
|
|
LFU - LIFO stack unload |
|
Status Bits: |
EN |
Enable - is on when the input to the function is on |
|
DN |
Done - is on when the shift operation is complete |
|
ER |
Error - indicates when an error has occurred |
|
UL |
Unload - the unloaded value is stored in this bit |
Registers: |
none |
|
Available on: Micrologix, PLC-5
SEQUENCERS
page 464
SQI - Sequencer Input |
|
|
|
|||
|
|
A |
|
SQI |
|
|
|
|
|
||||
|
|
|
|
SEQUENCER INPUT |
|
|
|
|
|
||||
|
|
|
|
File |
#N7:10 |
|
|
|
|
|
|||
|
|
|
|
Mask |
FF00 |
|
|
|
|
|
Source |
N7:0 |
|
|
|
|
||||
|
|
|
|
Control |
R6:0 |
|
|
|
|
|
Length |
7 |
|
|
|
|
|
Position |
0 |
|
Description: |
This will compare a source value to a set of values in a sequencer table. |
|||||
Status Bits: |
none |
Registers: none none
Available on: Micrologix, PLC-5
SQL - SeQuencer Load |
|
|
|||
|
|
A |
SQL |
|
|
|
|
||||
|
|
|
|
SEQUENCER LOAD |
|
|
|
|
|
||
|
|
|
|
File |
#N7:10 |
|
|
|
|
||
|
|
|
|
Source |
N7:0 |
|
|
|
|
Control |
R6:0 |
|
|
|
|
||
|
|
|
|
Length |
6 |
|
|
|
|
Position |
0 |
|
|
|
|
|
|
Description: |
When the input goes from false to true the value at the source will be |
|
|
loaded into the sequencer. After the position has reached the length |
|
|
the following values will be ignored, and the done bit will be set. |
|
Status Bits: |
EN |
Enable - will be true when the input to the function is true |
|
DN |
Done - will be set when the sequencer is fully loaded |
|
ER |
Error - will be set when there has been an error |
Registers: |
none |
|
Available on: Micrologix, PLC-5
page 465
SQO - SeQuencer Output |
|
|
|||
|
|
A |
SQO |
|
|
|
|
||||
|
|
|
|
SEQUENCER OUTPUT |
|
|
|
|
|
||
|
|
|
|
File |
#N7:10 |
|
|
|
|
||
|
|
|
|
Mask |
FF00 |
|
|
|
|
Dest |
N7:0 |
|
|
|
|
||
|
|
|
|
Control |
R6:0 |
|
|
|
|
Length |
6 |
|
|
|
|
Position |
0 |
|
|
|
|
|
|
Description: |
When the input goes from false to true the sequencer will output a value |
|
|
from a new position in the sequencer table. After the position has |
|
|
reached the length the sequencer will reset to position 1. Note that the |
|
|
first entry in the sequencer table will only be output the first time the |
|
|
function is un, or if reset has been used. |
|
Status Bits: |
EN |
Enable - will be true when the input to the function is true |
|
DN |
Done - will be set when the sequencer is fully loaded |
|
ER |
Error - will be set when there has been an error |
Registers: |
none |
|
Available on: Micrologix, PLC-5
PROGRAM CONTROL

page 468
PID - |
|
|
|
||
|
|
A |
|
TON |
|
|
|
||||
|
|
|
|
TIMER ON DELAY |
|
|
|
|
|||
|
|
|
|
Timer |
T4:0 |
|
|
|
|
||
|
|
|
|
Time Base |
1.0 |
|
|
|
|
Preset |
10 |
|
|
|
|||
Description: |
|
Accum. |
0 |
||
cfvgfdg |
|
||||
Status Bits: |
cf |
cfvgfdg |
Registers: cf cfvgfdg
Available on: Micrologix, PLC-5
BLOCK TRANSFER
page 469
BTW |
|
|
|
||
|
|
A |
|
TON |
|
|
|
||||
|
|
|
|
TIMER ON DELAY |
|
|
|
|
|||
|
|
|
|
Timer |
T4:0 |
|
|
|
|
||
|
|
|
|
Time Base |
1.0 |
|
|
|
|
Preset |
10 |
|
|
|
|||
Description: |
|
Accum. |
0 |
||
cfvgfdg |
|
||||
Status Bits: |
cf |
cfvgfdg |
Registers: cf cfvgfdg
Available on: Micrologix, PLC-5
ASCII
page 470
AWT - |
|
|
|
||
|
|
A |
|
TON |
|
|
|
||||
|
|
|
|
TIMER ON DELAY |
|
|
|
|
|||
|
|
|
|
Timer |
T4:0 |
|
|
|
|
||
|
|
|
|
Time Base |
1.0 |
|
|
|
|
Preset |
10 |
|
|
|
|||
Description: |
|
Accum. |
0 |
||
cfvgfdg |
|
||||
Status Bits: |
cf |
cfvgfdg |
Registers: cf cfvgfdg
Available on: Micrologix, PLC-5