


page 34
4.5 SAMPLE TIME
•In deadbeat type controllers we do not typically see mentions of the sample period, but in most practical systems we see a mention of the sample time ‘T’.
•We can use the system transfer function to calculate the acceptable range of controller time. In all cases the lower sample period is 0, but for practical reasons we may want to make this larger.
•A shorter sample time requires a faster computer, and steals cycle time from other processes.
•The general procedure is,
1.Find the characteristic equation of the overall system transfer function.
2.Determine the roots (symbolically) of the equation.
3.Select values of ‘T’ that ensure that all of the roots have a value of 1 or more.
4.Select a sample time that is less than the longest time.
•Consider the example below,
G( B) |
= |
4TB – 2 |
|
B----------------------------------2 + TB – 2T2 |
|||
|
|
Find the sample time T required for stability,
First, we find the characteristic equation, and solve for the roots, when the roots are
B2 + TB – 2T2 |
= 0 |
|
|
|
|
|
|
|
|
|
|
B = |
– ( T) ± |
( T) 2 – 4( 1) ( –2T2) |
= |
T |
( – 1 |
± |
1 + 8) |
= |
T |
( – 1 |
± 3) = 1 |
-------------------------------------------------------------------- |
2( 1) |
-- |
-- |
||||||||
|
|
|
2 |
|
|
|
|
2 |
|
|
|
T = 1, 0.5 |
|
|
|
|
|
|
|
|
|
|
|
Based on these results we can now determine the stable region.
page 35
4.6 SUMMARY
• The following is a map of techniques that show typical uses of the mathematical technique covered so far.
|
|
|
|
|
|
|
input functions |
|
|
|
|
|
error functions |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
from data |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
table |
|
|
|
|
|
|
input function |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
equation |
|
|
|
|
|
|
output |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
value table |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
real |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
system |
|
|
|
|
|
|
|
|
|
|
|
|
B-shift |
|
|
|
|
|
partial fractions |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
or long division |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
final |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
input |
|
|
|
|
|
|
|
|
output |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
function |
|
|
|
|
|
function |
|
value |
|||||||||
|
differential |
|
|
|
|
|
|||||||||||||||||||||||
|
|
b-shift |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
theory |
|||||||||
|
equations |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
table |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
steady state |
|
|
|
|||||||||||
|
|
algebra |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
transfer |
characteristic |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
function |
|
|
|
|
|
stability |
|
|
|
|
||||||||||
|
difference |
|
|
|
|
|
equation |
|
|
|
|
|
analysis |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
equations |
b-shift |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
transfer |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
table |
|
|
|
|
function |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
calculations |
|
|
|
|
feedback |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
block |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
diagram |
|
equation |
|
system transfer |
|
|
|
|
|
||||||||||
|
estimated |
|
|
|
|
|
|
|
|
|
function |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
values |
|
|
transfer |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
transfer |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
function |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
function |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
realizability |
|
controller |
|
|
|
|
design |
|
pick sample |
||||||||||||||||||||
|
|
|
|
difference |
equation |
|
|
|
|
|
techniques |
|
|
|
|
|
|
time |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
equation |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
desired |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
behavior |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

page 36
4.7 PRACTICE PROBLEMS
1.a) We are developing a freight elevator control system. The first major task is developing a height positioning controller. The elevator is moved to a new floor by issuing a step function for the new floor height. The transfer function below relates the voltage supplied to the elevator motor to the height of the elevator. Develop a controller transfer function that has a first order response, and draw a complete block diagram.
B + 1 G = -------------------
p 1 – 0.5B
b) Develop the discrete equation for the controller if the time constant for the first order response is 5 seconds and the sampling time is 1 second.
2.c) Write a computer program (in the computer language of your choice) that implements the controller in question 1. Assume the input and output values are set using the two functions below.
INPUT() - This function will return the elevator height in feet (floating point) OUTPUT(value) - This function will set the output voltage at ‘value’
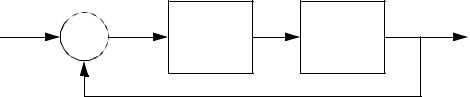
3.Redraw the following system and add a feedforward controller. Develop the function used for the feed forward controller.
+ |
|
|
|
|
B + 5 |
|
|
|
|
|
( 10 – B) |
|
|
|
|
|
|
|
|
|
|
|
|
----------------------- |
|
|
|||
|
|
|
|
|
------------ |
|
|
|
|
|
B( 1 – B) 2 |
|
|
|
|
|
|
|
|
B – 1 |
|
|
|
|
|
|
|
||
|
_ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B + 2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. The control system below will be used for positioning the height of an elevator.
page 37
rn |
+ |
G |
|
1 – B |
c |
n |
|
c |
|
||||
|
|
|
------------ |
|
|
|
|
|
|
|
B |
|
|
|
|
- |
|
|
|
|
a)Find a controller transfer function that gives a first order response for a time step of T=1 and a time constant of 3.
b)Develop the discrete equation and determine if the controller is realizable.
c)Develop a transfer function for the final system and determine if the system is stable.
ANS. |
|
0.283B2 |
|
a) |
Gc = |
|
|
1---------------------------– 2B + B2 |
|
||
|
|
||
b) realizable |
|
|
|
c) |
|
0.283B2 |
|
G = |
------------------------- |
stable |
|
|
1 – 0.717B |
4. We want to design a control system to minimize the effects of disturbance. Given a step input of magnitude 1, we are willing to accept a maximum error of 0.5 for one time step.
Gp = |
10B |
----------- |
|
|
1 – B |
a) Find a controller transfer function.
b) Develop the discrete equation for the system and determine if the controller is realizable?
ANS. |
|
|
10 – 0.5( 1 – B) 2 |
|
|
|
|
|
|
|
||||
|
Gc |
= |
|
|
|
|
|
|
|
|||||
a) |
---------------------------------------5B( 1 – B) |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
b) not realizable |
|
m |
|
= m |
|
+ |
9.5 |
e |
|
1 |
|
0.5 |
|
|
|
n |
n – 1 |
------5 |
n + 1 |
+ --e |
n |
– ------e |
n – 1 |
||||||
|
|
|
|
|
|
|
5 |
5 |
||||||