

ФГБОУВПО «Воронежский государственный
технический университет»
А.И. Андреев И.В. Андреев
ПРОЕКТИРОВАНИЕ МЕХАНИЗМОВ
РАДИОЭЛЕКТРОННЫХ СРЕДСТВ
Утверждено Редакционно- издательским советом
университета в качестве учебного пособия
Воронеж 2012
УДК 621.396.66
Андреев А.И. Проектирование механизмов радиоэлектронных средств: учеб. пособие / А. И. Андреев, И.В. Андреев. - Воронеж: ФГБОУВПО “Воронежский государственный технический университет”, 2012. - 144 с.
Подробно рассматриваются основы проектирования и конструирования механизмов РЭС, расчет кинематических и геометрических характеристик механизмов, их силовой расчет, выбор материалов и прочностные параметры зубчатых, фрикционных, механизмов прерывистого движения, анализируются программы расчетов таких передач. Издание соответствует требованиям Государственного образовательного стандарта высшего профессионального образования по направлениям 200100 «Приборостроение»». и 211000 «Конструирование и технология электронных средств» для дисциплины «Прикладная механика».
Пособие может широко использоваться при курсовом проектировании студентами очной и заочной форм обучения.
Табл. 11. Ил. 37. Библиогр.: 12 назв.
Научный редактор д-р физ.-мат. наук, проф. Ю.С. Балашов
Рецензенты: кафедра естественно научных дисциплин Международного института компьютерных технологий (канд. физ.-мат.. наук, доц. М.А. Ефимова);
докт. техн. наук, профессор В. М. Питолин
© Оформление.ФГБОУВПО "Воронежский
государственный технический
университет", 2012
Введение
При проектировании механизмов РЭС производится анализ различных типов передач: зубчатых и червячных, фрикционных с жесткой и гибкой связью, планетарных и волновых передач, а также рассматриваются различные типы исполнительных механизмов: рычажные, кулачковые и механизмы прерывистого движения: секторная зубчатая передача, мальтийский крест и храповый механизм. Исходя из функциональных особенностей работы РЭС все механизмы можно объединить в следующие группы: механизмы привода антенн; механизмы дистанционных передач; отсчетные механизмы; механизмы следящих систем; передачи ручной настройки; механизмы перемещения носителей информации в устройствах магнитофонов и видеомагнитофонов; механизмы электромеханической настройки.
Механизмы каждой группы имеют свои особенности как с точки зрения конструкции, так и передаваемых нагрузок и характера движения. Так, например, лентопротяжный механизм современного кассетного магнитофона включает несколько зубчатых передач и фрикционных механизмов с гибкой связью, состоящих из нескольких цилиндрических дисков, приводящихся во вращение гибкой связью, представляющей плоский или круглый ремень.
Конструкции приводов современных CD-ROM персональных компьютеров содержат несколько различных зубчатых механизмов: прямозубых и реечных передач, задающих определенную скорость вращения диска и возможность установки его в персональный компьютер. Проектирование таких передач невозможно без расчета геометрии и динамических характеристик механизмов, а правильный выбор материалов и определение силовых нагрузок с расчетом зацепления на прочность определяет их конкурентоспособность и технологичность
1. Структура механизмов
Механизм представляет собой связанную систему тел, движущихся как единое целое. Каждое такое тело называется звеном. В зависимости от конструкции звено может быть простым, т.е. выполненным без применения сборочных операций, или сложным. Простое звено называют деталью, сложное звено определяют как сборочная единица с использованием сборочных операций. Звенья различают по конструктивным признакам ( зубчатое колесо, червяк, диск, кулачок, водило, мальтийский крест, сектор зубчатого колеса, рейка, толкатель, вал, ось и т. д.) и по деформативности (жесткое и гибкое звено). По характеру движения звено, совершающее полнооборотное вращательное движение, называют кривошипом, а звено, совершающее возвратно-поступательное движение, – ползуном. Соединение отдельных частей механизма осуществляется с помощью кинематических пар. Кинематическая пара – это соединение двух соприкасающихся звеньев, допускающих их относительное движение. Конструктивно любая пара представляет собой подвижное сопряжение соединительных частей звеньев, в котором силовой поток от одного звена к другому передается за счет геометрического замыкания (зубчатая пара) или силового замыкания (пружина прижимает вращающиеся диски). Кинематические пары передают нагрузку и движение и часто определяют работоспособность механизма в целом. Поэтому правильный выбор вида пары, ее формы и размеров, а также конструкционных материалов имеет большое значение при проектировании механизмов радиоэлектронных средств (РЭС). По характеру соприкосновения элементов кинематические пары подразделяют на низшие, в которых звенья контактируют по поверхности, и высшие, в которых звенья контактируют по линии или в точках. Высшие пары имеют меньшие потери на трение и компактную конструкцию, а низшие обладают большой нагрузочной способностью. По числу наложенных условий связи S (или степени подвижности H) на относительные движения звеньев кинематические пары делят на пять классов (рис. 1.1).
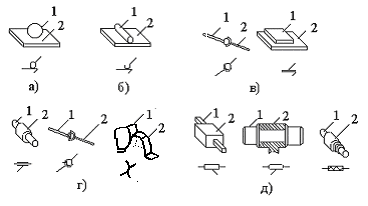
Рис. 1.1. Виды кинематических пар: шар-плоскость (а), цилиндр-плоскость (б), сферическая и плоскостная пары (в), цилиндрическая и сферическая с пальцем пары, и пара, представляющая контакт двух криволинейных поверхностей (г), поступательная и вращательная, и винтовая пары (д), 1, 2 –звенья, образующие кинематическую пару
Кинематическая пара шар-плоскость относится к первому классу (S = 1), цилиндр - плоскость относится ко второму классу (S = 2), сферическая и плоскостная пары составляют третий класс (S = 3), цилиндрическая и сферическая с пальцем пары, и пара-контакт двух криволинейных поверхностей входят в четвертый класс (S = 4), поступательная, вращательная и винтовая пары образуют пятый класс. (S = 5).
Обозначение кинематической пары на кинематических схемах представлено на рис 1.1 нижним видом под каждой парой. Следует отметить, что пару, представляющую контакт двух криволинейных поверхностей относят к четвертому классу, и называют также парой качения со скольжением /1/. Эти пары образуются боковыми поверхностями зубьев колес, которые находятся в зацеплении, роликами фрикционных передач, кулачком и толкателем. Важнейшей характеристикой кинематических пар является число степеней свободы. Числом степеней свободы тела называется число независимых параметров, полностью определяющих его положение. Положение свободного звена на плоскости определяется тремя независимыми параметрами ( координатами) : положением любой точки звена С (xc , yc) , и углом поворота продольной оси звена (). Свободное звено в пространстве имеет шесть степеней свободы: поступательные движения определяются координатами xc, yc, zc, а вращательные - углами x, y , z. (рис. 1.2).
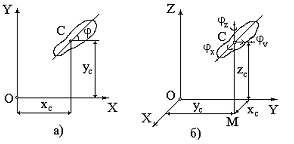
Рис. 1.2. Независимые параметры звена: на плоскости (а) и в пространстве (б)
Звенья механизма, образуя кинематические пары, тем самым утрачивают возможность того или иного относительного движения.
Такое ограничение движения принято называть условием связи, а соединение со звеном, которое исключает данное движение, связью.
Пусть два звена образуют кинематическую пару. Обозначим W – число степеней свободы одного звена относительно другого и S – число условий связи, наложенных кинематической парой.
Тогда для плоской и пространственной кинематических пар соответственно имеем
W = 3 – S , (1.1)
W = 6 – S . (1.2)
Показанные низшие - вращательная и поступательная (д) – пары по числу связей относятся к пятому классу при этом - W=1, а кинематическая пара (а) по виду элементов – высшая, а по числу связей относящаяся к первому классу, имеет число степеней свободы W=5, для высшей пары, представляющей контакт двух криволинейных поверхностей (г), число степеней свободы равно W=2.
Система звеньев, соединенных с помощью кинематических пар называется кинематической цепью. В зависимости от строения различают замкнутые и незамкнутые кинематические цепи.
В замкнутой кинематической цепи (рис.1.3 а, г) каждое звено входит не менее чем в две кинематические пары, в незамкнутой цепи (рис. 1.3 б, в) имеются звенья, входящие лишь в одну кинематическую пару.
Кинематические цепи классифицируют также по внешним признакам, условно разделяя их на плоские и пространственные , на простые (рис.1.3 а, б) и сложные (рис.1.3 в, г).
Простой называют кинематическую цепь, у которой каждое звено входит в соединение с другим звеном с помощью одной или двух кинематических пар. В противном случае цепь называют сложной.
Поэтому механизм представляет кинематическую цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья движутся определенным образом.
Звено, относительно которого оцениваются параметры движения, называют корпусом или стойкой. В зависимости от положения в цепи различают входное и выходное звенья. Входным называют звено, которому сообщается движение от двигателя, выходным – звено, реализующее движение, для выполнения которого предназначен данный механизм.
Для структурного анализа используют структурную схему – простейшую расчетную модель механизма, описывающую принцип действия и основные особенности работы.
Для этого механизм изображают с помощью условных обозначений звеньев и кинематических пар.
На схеме звенья обозначают цифрами, а пары и характерные точки – буквами, при этом неподвижное звено показывают штриховкой.

Рис.1.3. Кинематические цепи
Структурными формулами называются закономерности, связывающие число степеней свободы W кинематической цепи механизма с числом звеньев и числом и видом его кинематических пар.
Если предположить, что число степеней свободы механизма W совпадает с числом обобщенных координат, то для определения W достаточно найти общее число координат, определяющих положение всех звеньев механизма, и число уравнений, связывающие эти координаты. Разность между этими числами дает число независимых координат, если все уравнения связи независимы.
Каждое звено, находясь в пространстве, имеет шесть степеней подвижности. Если таких звеньев k, то общее число степеней подвижности будет 6k. Соединение звеньев в кинематические пары накладывает связи на относительное движение звеньев.
Эти ограничения зависят от класса кинематической пары, т.е. числа условий связи. Если число пар каждого класса обозначит через pn, где индекс n- номер ее класса, то в самом общем случае в кинематической цепи будет p1 пар первого класса, p2 пар второго класса и т.д.
Следовательно, из 6k степеней подвижности, которыми обладают свободные звенья, следует исключить те степени подвижности, которые ограничиваются кинематическими парами.
Тогда число степеней подвижности пространственной кинематической цепи будет /1, 2/
H = 6k – 5p5 - 4p4 - 3p3 - 2p2 - p (1.3)
Если одно из звеньев кинематической цепи будет неподвижным (стойка), то степень подвижности кинематической цепи W (число степеней подвижности относительно звена, принятого за неподвижное) будет
W= 6n – 5p5 - 4p4 - 3p3 - 2p2 – p1 (1.4)
Если звенья механизма движутся в одной плоскости, то механизм называется плоским и структурная формула (1.4) для общего вида таких механизмов принимает вид формулы Чебышева
W= 3n – 2p5 - p4 (1.5)
Структурные формулы (1.4) и (1.5) получены из предположения, что все уравнения связи независимы.
В некоторых механизмах это условие не выполняется.
В общее число наложенных связей может войти q избыточных (повторных) связей, которые не уменьшают подвижности механизма, обращая его в статически неопределенную систему. Тогда формулы (1.4) и (1.5) принимают вид
W= 6n – 5p5 - 4p4 - 3p3 - 2p2 – p1 + q (1.6)
и
W= 3n – 2p5 - p4 + q (1.7)
Из формул (1.6) и (1.7) получаем
q=W – 6n + 5p5 + 4p4+ 3p3 + 2p2 + p1 (1.8)
q=W – 3n + 2p5 + p4 (1.9)
При q = 0 механизм представляет собой статически определимую систему и сборка его происходит без деформации звеньев (самоустанавливающийся механизм), а при q 0 – статически неопределимую систему. Сборка и движение такого механизма происходят при деформации его звеньев.
В уравнении (1.8) неизвестны W и q и решение его представляет большую сложность.
В реальном механизме между элементами кинематических пар имеются зазоры, а при движении механизма его звенья могут деформироваться. Это является источником шума.
При проектировании механизмов следует выполнять два основных требования. Во-первых, точность изготовления деталей и монтажа опорных и корпусных деталей должна быть определена из условий отcутствия защемления элементов кинематических пар.
Во-вторых, жесткость корпусных деталей должна быть достаточно высокой, чтобы исключить возможность перекоса осей вращения кинематических пар и параллельного смещения осей шарниров или направляющих, обусловленных деформацией корпуса. В противном случае появится возможность защемления элементов кинематических пар и усиленного изнашивания пар трения.
Все механизмы, в том числе и плоские, при анализе и синтезе структуры должны рассматриваться как пространственные.
В плоском четырехзвенном механизме (рис. 1.4) все кинематические пары пятого класса являются одноподвижными. Если оси шарниров A, B, C, D строго параллельны между собой, то по формуле (6) степень подвижности W= 3n – 2p5 =33 - 24 =1.
Если тот же механизм рассматривать пространственным, то при
W= 1 число избыточных связей будет q=W - 6n + 5p5 =1-63 + 54=3, т.е. в механизме имеются три избыточные связи. Устранение их достигается изменением подвижности отдельных кинематических пар.
Например, если шарнир B заменить сферической парой третьего класса, а шарнир C - сферической парой с пальцем (четвертый класс) (Рис.1.4, б), то избыточные связи в механизме будут отсутствовать и
W= 6n – 5p5 - 4p4 - 3p3 + q =63 - 52 -41-31 + 0 = 1
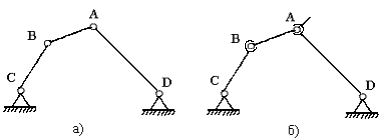
Рис. 1.4. Схемы и определение избыточных связей:
а) – четырехзвенный механизм с парами пятого класса, б) - четырехзвенный механизм с парами третьего, четвертого и пятого классов
Устранение избыточных связей снижает требования к точности изготовления кинематических пар, способствует адаптации основания механизма к деформациям и погрешностям монтажа. Под анализом механизма понимается определения количества звеньев и кинематических пар, классификация кинематических пар, определение степеней подвижности механизма, а также класса и порядка механизма.
Структурным синтезом механизма называется проектирование структурной системы механизма, которая состоит из неподвижного и подвижных звеньев и кинематических пар.
Удобным методом нахождения структурной схемы является метод присоединения структурных групп Ассура к ведущему звену или к основному механизму. Группой Ассура называется кинематическая цепь, которая в случае ее присоединения элементами внешних пар к корпусу получает нулевую степень подвижности, т.е. образует ферму.
Структурные формулы групп Ассура получаются из формулы Чебышева: W= 3n – 2p5, откуда p5= 3/2n, где n – подвижных звеньев. Отсюда следует, что число кинематических пар пятого класса в группе обязательно целое число. Этот принцип на рис. 1.5, а проиллюстрирован примером присоединения двух двухповодковых групп с нулевыми степенями подвижности к ведущему звену (цифрами обозначены номера звеньев).
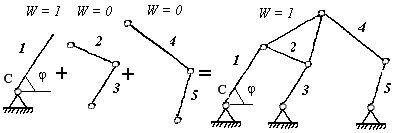
Рис. 1.5. Образование плоского шестизвенного механизма
При этом класс и порядок механизма определяются по той группе, которая имеет наивысший класс и входит в состав механизма.
Порядок группы определяется числом элементов, которыми группа присоединяется к основному механизму (рис. 1.6).
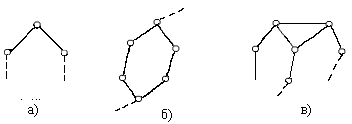
Рис. 1.6. Схемы групп различного порядка: а) и б) – второй порядок, в) – третий порядок
Класс группы определяется классом наивысшего по классу контуру, входящего в его состав.
Класс контура определяется количеством кинематических пар, в которые входят образующие его звенья (рис. 1.7).
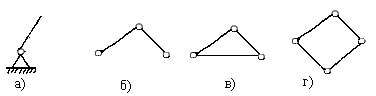
Рис. 1.7. Схема к определению класса контура: а) - 1- й класс, б) – 2-й класс, в) – 3-й класс, г) – 4-й класс
Номер класса группы равен числу кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами, за исключением двухповодковой группы, которая условно относится ко второму классу.
Класс и порядок механизма зависят от того, какое звено является ведущим.
Принцип наслоения структурных групп распространяется на механизмы, звенья которых представляют твердые тела.
Структурная группа плоских механизмов может быть отражена формулой (1.4), если W = 0 .
Основные задачи структурного анализа механизмов включают в себя : определение количества свобод движения механизмов в зависимости от геометрических форм сопряжения звеньев и их числа, разделение механизма на структурные группы, обеспечения заданных форм траекторий движения точек звеньев в соответствии с требованиями технологии производства и эксплуатации
Таким образом, наиболее наглядное представление о структуре механизма дает его структурная схема, под которой понимают изображение всей совокупности составляющих злементов, определяющих функции механизма.
Для выполнения схем применяют условные графические обозначения, установленные Единой системой конструкторской документации (ГОСТ 2.791-84).
Более подробное описание структуры механизмов можно найти в работах /1-5/.
Контрольные вопросы
Какие существуют классы кинематических пар и чем они определяются?
Охарактеризуйте основные звенья механизмов по
конструктивным признакам?
Какие существуют типы высших кинематических пар
механизмов и их условные обозначения?
Чем определяется число степеней свободы?
Какие существуют основные виды кинематических
цепей?
Как определяется число условий связи для плоского и
пространственного механизмов?
Чем характеризуется структурный анализ механизмов?
Как определяется число степеней подвижности
пространственной кинематической цепи, если одно из ее звеньев будет неподвихным?
Как определяется класс контура?
Охарактеризуйте метод присоединения структурных
групп Ассура к ведущему звену?
Какие существуют схемы групп различного порядка?
– К какому классу относится пара контакт двух
криволинейных поверхностей и где она используется?
Как определяется число степеней свободы с учетом
избыточных связей?
Поясните формулу Чебышева для определения числа
степеней свободы?
Какие существуют типы низших кинематических пар
механизмов и их условные обозначения?
Сколько число условий связи имеет винтовая и
вращательная кинематические пары и их условные обозначения?
Что понимается под структурным синтезом механизма?
Какие выполняются требования при проектировании
механизма радиоэлектронных средств?
Что называется структурным формулами
кинематических целей?
Сколько степеней подвижности имеет звено и
кинематическая цепь в пространстве?
Какие звенья и кинематические пары входят в состав
механизма винт - гайка?