

ргр 1. геодезия
.doc
МИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА РОССИЙСКОЙ ФЕДЕРАЦИИ
|
|
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «БАШКИРСКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ» |

Кафедра кадастра недвижимости
и геодезии
Б3.Б.5 ГЕОДЕЗИЯ
Б3.Б.2 ГЕОДЕЗИЯ
Практическое занятие.
Уравнивание системы нивелирных и теодолитных ходов
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Направление: 120700 Землеустройство и кадастры
120100 Геодезия и дистанционное зондирование
Степень: бакалавр
2012
УДК 528
ББК 26.11
М 54
Рекомендовано к изданию методической комиссией факультета землеустройства и лесного хозяйства (протокол № 1 от 03. 09. 2012 г.)
Составители: доцент Ишбулатов М.Г., ст. преп. Яковлева Ю.Н.
Рецензент: доцент, к.т.н. Лемешев А.И.
Ответственный за выпуск: заведующий кафедрой кадастра
недвижимости и геодезии, к.с-х..н., доцент Ишбулатов М.Г.,
г. Уфа, БГАУ, кафедра кадастра недвижимости и геодезии
1 Общие сведения
Съемочная сеть, делится на плановую и высотную.
Плановая высотная сет в зарыто местности строится в виде отдельных теодолитных ходов или систем теодолитных ходов, опирающихся на пункты исходной геодезической сети, а также в виде свободных сетей теодолитных полигонов.
Высотная геодезическая сеть строится методом геометрического или тригонометрического нивелирования. Она может состоять из отдельных нивелирных ходов или систем нивелирных ходов, опирающихся на пункты исходной высотной сети более высокого класса, а также в виде сетей свободных полигонов.
При уравновешивании несвободных съемочных сетей координаты или отметки пунктов исходной сети должны быть известны, при этом они рассматриваются как безошибочные и не подлежат исправлению. Поэтому такие пункты часто называют твердыми.
Рассмотрим уравновешивание свободных и несвободных сетей ходов. Для этих сетей существуют различные способы уравновешивания.
2 Уравнивание системы нивелирных ходов с одной узловой точки
Требуется уравновесить систему нивелирных ходов с одной узловой точки по рисунку 1, опирающуюся на пункты нивелирования ранее построенной сети более высокого класса, если известны: отметки исходных пунктов На, Нв, Нд, суммы измеренных превышений по ходам h1 h2, h3, длина ходов L1 L2,L3.
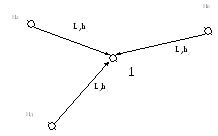
Рисунок 1 Схема нивелирных ходов
Составляется схема ходов, и вычисляются невязки с суммой превышений по наиболее коротким ходам. Для определения достоверности вычисляют допустимую невязку по формуле 2.1..
fh =±20 мм л/Z (2.1)
где Z - длина хода (км).
Определяется отметка узловой точки по каждому ходу.
Нк2=На + h1, Нк2 = Нв + h2, Нк3=Нд+h3
Для нивелирного хода определяется вес.
P1 = С/ L1 , P2 = С/ L2, Р3 = С/ L2
Средне весовое значение отметки определяется формулой 2.2.
![]() (2.2)
(2.2)
где
![]()
Вычисляются невязки превышений по каждому ходу.
fh1 = h1-(H - Ha)
fh2 = h2- (Н - Нв)
fh3 = h3- (Н - Нд)
Полученные невязки распределяются на превышения соответствующих ходов и определяются отметки точек.
Проверка: [рf]=0
Производится оценка точностей полевых работ, определяется средняя квадратическая погрешность единицы веса по формуле 2.3.
![]() (2.3)
(2.3)
где N - количество ходов
Средняя квадратическая погрешность определения узловой точки определяется по формуле 2.4.
![]() (2.4)
(2.4)
Н = Нк±М
-
Уравнивание теодолитных ходов с одной узловой точки
Требуется уравнять систему теодолитных ходов с одной узловой точкой, опирающихся на пункты и стороны ранее построенной сети более высокого класса (рисунок 2), если известны: координаты пункты В, Д, F и дирекционные углы сторон АВ, СД, ЕF исходной сети и измеренные значения углов и длин теодолитных ходов уравниваемой системы.
Теодолитные хода уравновешивают упрощенно: вначале уравновешивают углы, затем вычисляют приращения координат, которые уравновешивают, условно считая их независимыми. Такой способ называют способом раздельного уравнивания.
1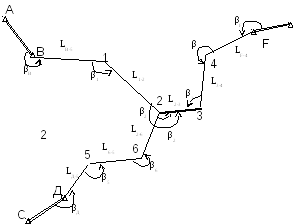
3
Рисунок 2 Схема теодолитных ходов
Узловая сторона 2-3. Для этой линии находим значения дирекционных углов каждого хода по формуле 3.1.
α i = α i исх + 180º · n i - Σ β i (3.1),
где исходной формулой будет формула 3.2
α (n)-(n+1)= α (n-1)-(n) + 180º- βn (3.2),
где α i исх = α АВ ;α СД; α ЕF
По найденным значениям α находят угловые невязки по формулам 3.3, по ходам заключенными между исходными дирекционными углами, выбираем два хода с наименьшим числом углов.
fβ (1+2) = α 2 - α 1; fβ (2+3) = α 3 - α 2 (3.3)
Если полученные невязки оказываются допустимыми, то определяют вес каждого направления на основании формулы 3.4
Pi = k / n1 (3.4)
где n– количество углов, k = const.
По формуле 3.5 вычисляют средне весовое значение дирекционного угла узловой линии.
α
=
![]() = α 0
+
= α 0
+
![]() (3.5)
(3.5)
α 0 - приближенное значение, ε i = α i - α 0
Вычисление невязок, по ходам 1, 2, 3 по формуле 3.6
f β = Σ β пр – Σ β теор (3.6)
Σ β теор = (для разомкнутого хода) = α нач + 180°·n – α кон
f βi = Σ βi – ( α нач + 180°·n – α кон ) или
f βi = α – ( αi исх + 180°·n – Σ βi исх ) или f βi = α – αi
f βi = α – αi – если в формуле применялись измеренные правые по ходу углы
f βi = αi – α – если в формуле применялись измеренные левые по ходу углы
Контролем правильности вычисления дирекционного угла α и невязки fβi является формула: [ p f β] = 0
Если невязки являются допустимыми, их распределяют с противоположным знаком в соответствующие ходы (поровну на каждый угол).
Вычисляют дирекционные углы всех сторон.
Средняя квадратическая ошибка измеренного угла определяется по формуле 3.7:
m
=![]() (3.7)
(3.7)
Средне квадратическая ошибка единицы веса определяется формулой 3.8:
μ
=
![]() (3.8)
(3.8)
где N– число ходов.
При малом количестве числа ходов оценка точности является грубой.
По вычисленным дирекционным углам и длинам сторон вычисляют приращение координат и их суммы по ходам. Уравнивание приращений координат производится, так же как и уравнивание углов.
хi = хi исх + ΣΔхi уi = уi исх + ΣΔуi
где хi исх = хв; хд; хF уi исх = ув; уд; уF
Для проверки правильности линейных измерений вычисляют невязки, по двум наиболее коротким ходам.
fx (1 – 2) = х2 - х1 ; fу (1 – 2) = у2 - у1
fx (2 – 3) = х3 - х2 ; fу (2 – 3) = у3 - у2
Абсолютная невязка
fабс 1+2 = √ f х2 1+2 + f у2 1+2 ; fабс 1+2 = √ f х2 1+2 + f у2 1+2
Относительная невязка
fотн 1+2 = f абс 1+2 / L 1+2 ; fотн 2+3 = f абс 2+3 / L 2+3
Если невязка допустима, вычисляют веса, для каждого значения координат узловой точки.
Pi = K / Li( расстояние)
у=
![]() =
у0
+
=
у0
+
![]() ;
х=
;
х=
![]() =
x0
+
=
x0
+
![]()
По этим координатам вычисляют невязки приращения по каждому ходу
fхi = хi – х; fуi = уi – у
Правильность вычисления окончательных координат узловой точки и невязку приращения координат, определяется по формуле:
[ p f x ] = 0; [ p f у ] = 0
Полученные невязки с противоположным знаком распределяются на приращения соответствующих ходов, пропорционально длинам этих ходов. После распределения невязок вычисляют координаты всех вершин теодолитных ходов.
Приложение А
Таблица 1 Варианты уравнивания нивелирной сети с одной узловой точкой
|
Вариант |
Реперы |
Превышения |
Расстояния |
||||||
|
Pn 10 |
Pn ll |
Pn l2 |
h 1 |
h 2 |
h 3 |
L 1 |
L 2 |
L 3 |
|
|
1 |
101,242 |
151,278 |
136,539 |
28,111 |
-21,921 |
-7,182 |
3,9 |
4,4 |
4,2 |
|
2 |
139,567 |
125,872 |
137,939 |
-10,182 |
3,599 |
-8,554 |
3,7 |
4,2 |
4,3 |
|
3 |
123,829 |
132,534 |
121,765 |
5,519 |
-3,142 |
7,638 |
4,0 |
4,1 |
4,2 |
|
4 |
117,678 |
129,975 |
102,761 |
-1,795 |
-14,065 |
13,121 |
3,1 |
3,9 |
3,6 |
|
5 |
126,721 |
101,975 |
103,761 |
-10,839 |
13,909 |
12,122 |
3,8 |
4,1 |
3,7 |
|
6 |
135,562 |
115,782 |
112,781 |
-13,782 |
5,997 |
8,997 |
3,7 |
1,0 |
4,1 |
|
7 |
129,781 |
134,642 |
102,698 |
-8,007 |
-12,891 |
19,052 |
3,9 |
4,2 |
4,1 |
|
8 |
101,597 |
136,246 |
145,756 |
20,149 |
-14,471 |
-23,980 |
4,1 |
4,0 |
43 |
|
9 |
159,761 |
161,523 |
127,693 |
-17,421 |
-19,182 |
14,678 |
3,8 |
4,3 |
4,2 |
|
10 |
160,843 |
131,372 |
126,593 |
-18,497 |
10,971 |
15,748 |
3,6 |
3,9 |
3,5 |
|
11 |
25,92 |
27,861 |
32,676 |
4,669 |
2,721 |
-2,095 |
3,2 |
4,1 |
3,6 |
|
12 |
28,21 |
31,672 |
54.925 |
2,489 |
-1,062 |
-4,235 |
3,5 |
4,2 |
3,3 |
|
13 |
34,26 |
32,821 |
28,563 |
-4,142 |
-2,239 |
2,018 |
3,8 |
4,0 |
4,1 |
|
14 |
58,263 |
62,973 |
52,821 |
-1,468 |
-6,198 |
3,981 |
4,0 |
3,9 |
3,9 |
|
15 |
66,627 |
59,947 |
51,088 |
-3,838 |
-3,145 |
5,719 |
3,7 |
4,1 |
3,3 |
|
16 |
51,623 |
46,264 |
41,889 |
-5,921 |
-0,581 |
3,812 |
3,4 |
3,9 |
4,1 |
|
17 |
40,005 |
43,580 |
50,989 |
5,695 |
2.115 |
-5,312 |
3,6 |
3,2 |
3,8 |
|
18 |
151,621 |
124,735 |
132,534 |
-11,050 |
15,830 |
8,032 |
2,8 |
3,1 |
2,7 |
|
19 |
79,777 |
65,621 |
64,328 |
-7,650 |
1 6,505 |
7,810 |
3,2 |
2,9 |
3,6 |
|
20 |
98,126 |
102,435 |
105,272 |
14,340 |
10,035 |
7,200 |
2,5 |
3,0 |
3,2 |
|
21 |
103,626 |
107,534 |
112,439 |
-3,630 |
-7,542 |
-12,450 |
3,1 |
3,2 |
3,7 |
|
22 |
83,555 |
94,121 |
80,666 |
12,340 |
1,772 |
15,226 |
3,1 |
3,5 |
2,6 |
|
23 |
41,333 |
43,222 |
50,721 |
8,560 |
6,672 |
-0,837 |
3,2 |
3,7 |
3.1 |
|
24 |
54,768 |
56,852 |
59,747 |
5,680 |
3,590 |
0,697 |
4,2 |
3,8 |
2,6 |
|
25 |
99,999 |
100,500 |
87,645 |
-10,005 |
-10,510 |
2,350 |
3,6 |
3,7 |
3,8 |
|
26 |
74,688 |
82,539 |
76,561 |
10,320 |
2,460 |
8,448 |
3,9 |
2,1 |
3,7 |
|
27 |
80,532 |
85,679 |
73,468 |
1,460 |
-3,685 |
8,530 |
3,4 |
3,3 |
2,6 |
|
28 |
120,571 |
130,232 |
122,643 |
4,436 |
-5,230 |
2,366 |
3,4 |
2,8 |
3,6 |
|
29 |
40,263 |
37,563 |
48,711 |
-6,036 |
15,123 |
2,418 |
3,2 |
4,1 |
2,9 |
|
30 |
70,325 |
62,888 |
60,222 |
4,470 |
2.972 |
+5,628 |
5,1 |
4,2 |
4,3 |
|
31 |
81,232 |
71,242 |
80,335 |
-3,082 |
6,000 |
-3,981 |
4,8 |
5,2 |
3,9 |
|
32 |
38,262 |
44,356 |
46,555 |
-4,637 |
-2,428 |
3,666 |
3,8 |
2,6 |
2,5 |
|
33 |
41,444 |
49,566 |
40,838 |
3,956 |
-4,780 |
3,336 |
6,4 |
5,2 |
4.3 |
Библиографический список
-
Маслов А.В. и др. Геодезия. – М.: Недра, 1980. – 528 с.
-
Баканова В.В. и др. Практикум по геодезии. – М.: Недра, 1983.– 240 с.
-
Шестюков А.Д., Баканова А.И. Справочное пособие по геодезическим работам при возведении гидротехнических сооружений. М.: Недра,
1990, стр. 96-98.