

--I семестр-- / Лекции / ktop_l
.pdfЛекции по КТОП
25
81 / 99

Лекции по КТОП
Лекция 9.
Система проектирования печатных плат Cadence
Решение компании Cadence для сквозного проектирования печатных плат электронно-вычислительных устройств ориентировано, прежде всего, на сверхплотные и многослойные печатные платы быстродействующих устройств. В системе комбинируются инструменты, позволяющие вести проектирование, начиная с построения общей концепции и заканчивая полностью подготовленными к производству печатными платами. В состав пакета входят программы:
1.Project Manager – менеджер проектов;
2.РСВ (печатная плата) Library – управление библиотеками компонентов, разработка символов принципиальных схем (Pad Developer), топологических посадочных мест (Allegro Library), их верификация и группировка (Library Explorer);
3.Allegro РСВ (Printed Circuit Board)– редактор печатных плат с возможностями размещения компонентов, трассировкой проводников и технологической подготовкой к производству;
4.Specctra – система размещения компонентов и трассировки проводников. Эти процессы могут происходить одновременно;
5.Concert HDL – редактор принципиальных схем, обеспечивающий быстрый ввод проектов, групповую разработку и использование ранее созданных проектов в том числе и других САПР;
6.Capture CIS – редактор принципиальных схем, заимствованный из пакета OrCAD, и имеющий интегрированную систему управления удаленными и локальными базами данных компонентов – Component Information System.
Кстандартной конфигурации прилагается набор опций, предназначенный для реализации ряда специфических действий к печатным платам:
1.Allegro Perfomance Options – расширение редактора печатных плат для разработки быстродействующих устройств, повторного использования старых проектов, подготовки процедуры автоматизированного тестирования и использования языка Skill;
2.Specctra Perfomance Options – расширенный набор правил проектирования для управления стратегией размещения и трассировки для программы
Specctra;
3.Pspice A/D – программа смешанного аналого-цифрового моделирования, заимствованная из пакета OrCAD;
4.Variant Design – многовариантное проектирование на основе базового проекта, поставляется для конфигурации включающей Concept HDL и Allegro;
5.Checkplus – расширение для редактора принципиальных схем Concept HDL, предназначеных для настройки и проверки правил проектирования;
6.Specctra Quest Signal Explorer – анализ целостности сигналов,
исследование паразитных эффектов печатных плат.
Пакет программ PCB Design Studio поддерживает технологию обмена информацией ODB++, разработанную фирмой Valor Computerized System, специализирующейся на решений для технологической подготовки производства. Эта технология поддерживает перспективный и интеллектуальный формат описаний печатных плат, который позволяет обеспечить высокое качество и
34
82 / 99

Лекции по КТОП
точность изготовления конечных изделий. Входящий в состав пакета редактор
схем Capture CIS можно использовать совместно с системой электронного документооборота и управления производства, разработанной и внедренной НИИ точной механики, как элемент развивающихся CALS – систем.
Внедрение СALS-технологий при производстве электронновычислительной техники
Основной концепцией CALS (непрерывное развитие и поддержка жизненного цикла) является повышение конкурентоспособности изделия за счет эффективного управления информацией. Задача CALS – преобразование жизненного цикла изделия в автоматизированный процесс путем реструктуризации (реинжиринга) входящих в него процессов. Непрерывное развитие предполагает постоянное приобретение изделием новых свойств за счет его постоянной модернизации, что требует постоянного контакта между поставщиком и потребителем. Поддержка жизненного цикла изделия предполагает организацию взаимодействия между ее участниками на основе новых телекоммуникационных и информационных технологий. Что позволяет более полно учесть потребности заказчика, что в свою очередь снизит затраты на этапах эксплуатации и обслуживания изделия, и в конечном итоге уменьшить затраты на весь жизненный цикл, хотя удельный вес затрат при создании модернизации изделия увеличивается. Одна из основных задач при повышении эффективного управления информацией состоит в снятии коммуникационных барьеров между участниками жизненного цикла изделия. Для решения этой задачи концепция CALS предполагает создание единого информационного пространства для всех участников жизненного цикла изделия, которое должно:
∙аккумулировать всю информацию об изделии;
∙быть единственным источником данных о нем (прямой обмен между участниками жизненного цикла исключается);
∙формироваться на основе международных, государственных и отраслевых стандартов.
Единое информационное пространство создается с помощью программноаппаратных средств у уже имеющихся участников жизненного цикла. Единое информационное пространство создается в два этапа:
1.Автоматизация отдельных процессов жизненного цикла изделия и представление данных о них в электронном виде.
2.Интеграция автоматизированных процессов и относящихся к ним данных.
Это пространство может иметь уровень подразделения компании или корпорации. Для реализации стратегии CALS используют 3 группы методов:
1.методы анализа и реинжиниринга бизнес процессов – методы реструктуризации функционирования предприятия. Эти методы позволяют перейти от бумажного к электронному документообороту, что облегчает внедрение новых технологий проектирования;
2.Методы стандартизованного представления данных в электронном виде, относящихся к отдельным процессам жизненного цикла изделия – 1-й этап создания единого информационного пространства;
3.Методы интеграции данных об изделии при интеграции автоматизированных процессов жизненного цикла – 2-й этап создания единого информационного пространства.
35
83 / 99

Лекции по КТОП
Для интеграции всех данных применяются системы управления данными об изделии – Product Data Manager (PDM). Их задача: сбор всей информации, создаваемой прикладными системами в единую модель. Процесс взаимодействия PDM и прикладных программ строится на основе стандартных интерфейсов:
∙функциональные стандарты – отслеживают организационную процедуру взаимодействия компьютерных систем (IDEFO);
∙информационные стандарты – реализуют модель данных, используемую всеми участниками жизненного цикла (ISO 10303);
∙стандарты на программную архитектуру – задают архитектуру программных систем, необходимую для организации взаимодействия без участия человека (CORBA);
∙коммуникационные стандарты – указывают способ физической передачи данных по локальным и глобальным сетям (Internet – стандарт).
Вобщем случае внедрение новых информационных технологий сопровождения изделий связано, прежде всего, с реализацией системы формализованного компьютерного описания изделия электронно-вычислительной техники на всех этапах жизненного цикла, которое включает:
∙стандартный язык обобщения размножаемых документов – SGML;
∙подсистему компьютерной графики CGM;
∙структурированный язык запроса SQL;
∙стандарт обмена данными о модели изделия ISO 10303;
∙язык высокого уровня описания модели изделия и аппаратуры на основе этих изделий VHDL, VeriLog.
36
84 / 99
Лекции по КТОП
Лекция 6.
Постановка задачи размещения модулей.
После распределения конструктивных элементов РЭА по коммутационным пространствам различного уровня и иерархии, для каждой полученной в результате компоновки сборочной единицы производят размещение включенных в его состав элементов предыдущего уровня, т.е. выбирают такое их взаимное расположение, при котором наилучшим образом учитываются предъявленные к аппаратуре требования.
Постановка задачи.
Исходной информацией при решении задач размещения являются:
∙данные о конфигурации и размерах коммутационного пространства, определяемые требованиям установки и крепления данной сборочной единицы в аппаратуре;
∙количество и геометрические размеры конструктивных элементов подлежащих размещению;
∙ряд ограничений на взаимное расположение отдельных элементов, учитывающих особенности разрабатываемой конструкции.
Задача сводится к отысканию для каждого размещаемого элемента таких позиций, при которых оптимизируется выбранный показатель качества и обеспечиваются наиболее благоприятные условия для последующего электрического монтажа. Основная сложность постановки задач размещения заключается в выборе целевой функции. Связано это с тем, что одной из главных целей размещений является создание наилучших условий для дальнейшей трассировки соединений, что невозможно проверить без проведения самой трассировки. Любые другие способы оценки качества размещения (минимум числа пересечения ребер графа, интерпретирующего электрическую схему соединений, разбиение графа на минимальное число плоских суграфов и т.д.), хотя и позволяют создать благоприятные условия для трассировки, но не гарантируют получение оптимального результата, т.к. печатные проводники представляют собой криволинейные отрезки конечной ширины, конфигурация которых определяется в процессе их построения и зависит от порядка проведения соединений. Следовательно, если для оценки качества размещения элементов выбрать критерий непосредственно связанный с получением оптимального рисунка металлизации печатной платы, то конечный результат может быть найден при совместном решении задач размещения, выбора очередности проведения соединений и трассировки, что практически невозможно уже для схем средней сложности, вследствие огромных затрат машинного времени. Поэтому все применяемые алгоритмы размещения используют промежуточные критерии, которые лишь качественно способствует решению основной задачи: получение оптимальной трассировки соединений.
Ктаким критериям относятся:
1.минимум суммарной взвешенной длины соединений;
2.минимум числа соединений, длина которых больше заданных;
3.минимум числа пересечений проводников;
4.максимальное число соединений между элементами, находящимися в соседних позициях, либо в позициях указанных разработчиком;
5.максимум числа цепей простой конфигурации.
29
85 / 99

Лекции по КТОП
Наибольшее распространение в алгоритмах размещения получил первый критерий. Это объясняется следующими причинами: уменьшение длин соединений улучшает электрические соединения устройства и упрощает трассировку печатных проводников и снижает трудоемкость изготовления.
В зависимости от конструкции коммутационной платы и способа выполнения соединений, расстояние между позициями установки элементов подсчитывается по одной из формул:
d (1)ij = |
|
|
|
|
|
|
|
|
|
|
|
|
|
(xi |
− x j )2 |
|
+ (yi |
− y j )2 |
(1) |
||||||
d (2)ij |
= |
|
xi |
− x j |
|
+ |
|
yi |
− y j |
|
(2) |
|
|
|
|
|
|||||||||
d (3)ij = |
(xi − x j )t + (yi − y j )t |
(3), |
||||||||||
где (xi , yi ) и (x j , y j ) – координаты i-ой и j-ой позиции коммутационной платы.
Формула (1) соответствует проведению проводников по кратчайшему пути между соединяемыми точками.
Формула (2) предлагает раскладку проводников параллельным сторонам платы. Формула (3) – применяется при наличии особых требований к максимальной длине отдельных соединений (как правило, t=2).
При практической реализации алгоритма размещения часто используют представления конструктивных элементов и позиции на коммутативной плате точками, совпадающие с их геометрическими центрами, а все соединения между элементами приводят к попарно взвешенным связям.
При практической реализации алгоритмов размещения часто используют представление конструктивных элементов и позиций на коммутационной плате точками, совпадающими с их геометрическими центрами, а все соединения между элементами приводят к попарно взвешенным связям.
Весовые оценки связей учитывают такие характеристики схемы, как число электрических цепей между элементами, теплонагруженность элементов, распространения сигналов в цепях и т.д. Широкий класс таких оценок описывается формулой:
g |
|
cij = å f (s)ij χ(ρs ) |
(4) |
s=1
где f (s)ij - вес s-ой цепи, связывающей элементы i и j;
χ(ρs )- коэффициент учета размера цепи, равный 2/ ρs ;
ρs - число выводов s-ой цепи;
g - число цепей, связывающих элементы i и j.
Величина f sij определяет важность s-ой цепи с точки зрения минимизации ее
длины.
Если при решении задач размещения требуется произвести рассредоточение теплонагруженных элементов, то
|
|
|
′ |
|
cij = |
|
cij |
(5) |
|
|
|
wi + wj |
||
1 + kт |
|
|
||
|
w |
|
||
|
|
|
доп |
|
|
|
|
|
|
|
|
30 |
|
|
86 / 99

Лекции по КТОП
где cij′ - значение коэффициента взвешенной связности, определяемое из соотношения (4);
wi ,wj - мощность рассеяния i-го и j-го элементов;
wдоп - допустимая мощность рассеяния двух рядом стоящих элементов; kт - коэффициент, учитывающий теплоотдачу в реальной конструкции.
В общем виде задача размещения конструктивных элементов на коммутационной плате формулируется следующим образом. Задано множество конструктивных элементов:
R= {r1,r2 ,Κ ,rn}
имножество связей между элементами:
V= {v1,v2 ,Κ ,vp },
атакже множество установочных мест (позиций) на коммутационной плате
T = {t1,t2 ,Κ ,tk }. Найти такое отображение множества R на множестве T, которое
обеспечивает экстремум целевой функции F.
Если критерием качества размещения является минимум суммарной взвешенной длины соединений, то задача состоит в минимизации:
n n
F = å åcij dij (6). i=1 j =1
Обычно поле позиций (коммутационная плата) имеет форму прямоугольника Pab = a × b с координатами 0 ≤ x ≤ a и 0 ≤ y ≤ b . Вся площадь платы разбивается
на ряд областей (позиций), число которых должно быть не меньше числа размещаемых элементов (рис. 1). В результате получим фиксированные позиции для установки элементов.
Перед разбиением поверхности коммутационной платы на позиции выделяют области для размещения выводных контактных зон схемы, а также запрещенные области, в которых не должны размещаться элементы схемы.
Все конструктивные элементы, подлежащие размещению, можно условно разделить на три группы:
1.нефиксированные элементы, местоположение которых на плате заранее не известно. Пусть таких элементов будет q ;
2.граничные элементы, к которым относятся элементы, связанные с разъемами, осуществляющие электрическую связь с элементами, расположенными на других коммутационных платах. Т.к. разъемы обычно помещают на внешней стороне коммутационной платы, то эти элементы желательно располагать у границы коммутационного поля. Пусть число таких элементов будет h − q
3.фиксированные элементы, местоположение которых заранее известно (указано разработчиком). Таких элементов будет n − h
31
87 / 99

Лекции по КТОП
Ограничение на размещение элементов указанных трех групп имеют следующий вид:
1 ≤ i ≤ q :{x* ≤ xi ≤ a − x*; y* ≤ yi ≤ b − y*;
x = x*; |
|
x* ≤ x ≤ a − x*; |
||
i |
|
|
|
i |
q + 1≤ i ≤ h :{y* ≤ y |
i |
≤ b − y* |
или{ |
y = y*; |
|
|
|
i |
|
h + 1≤ i ≤ n :{xi = βi ;
yi = γ i ;
где x* и y*- это координаты центра левой нижней позиции (рис.1); βi и γ i - координаты центра i-го фиксированного элемента.
Для конкретного случая задачу размещения можно сформулировать следующим образом: найти такое местоположение элементов на коммутационной плате, при котором достигается минимум:
n |
n |
+ (yi − y j )t ]ν |
|
F = å åcij [(xi − x j )t |
(7) |
||
i=1 j =1 |
|
|
|
при x* ≤ x ≤ a − x* |
для 1≤ i ≤ q ; x |
= x* |
|
i |
i |
|
|
|
для q + 1≤ i ≤ h; |
|
|
y* ≤ yi ≤ b − y* |
для 1≤ i ≤ h; |
|
|
xi = βi ; yi = γ i |
для h + 1≤ i ≤ n (8) |
|
|
Оптимизацию размещения осуществляют, как правило, из некоторого случайного или интуитивно выбранного первоначального размещения.
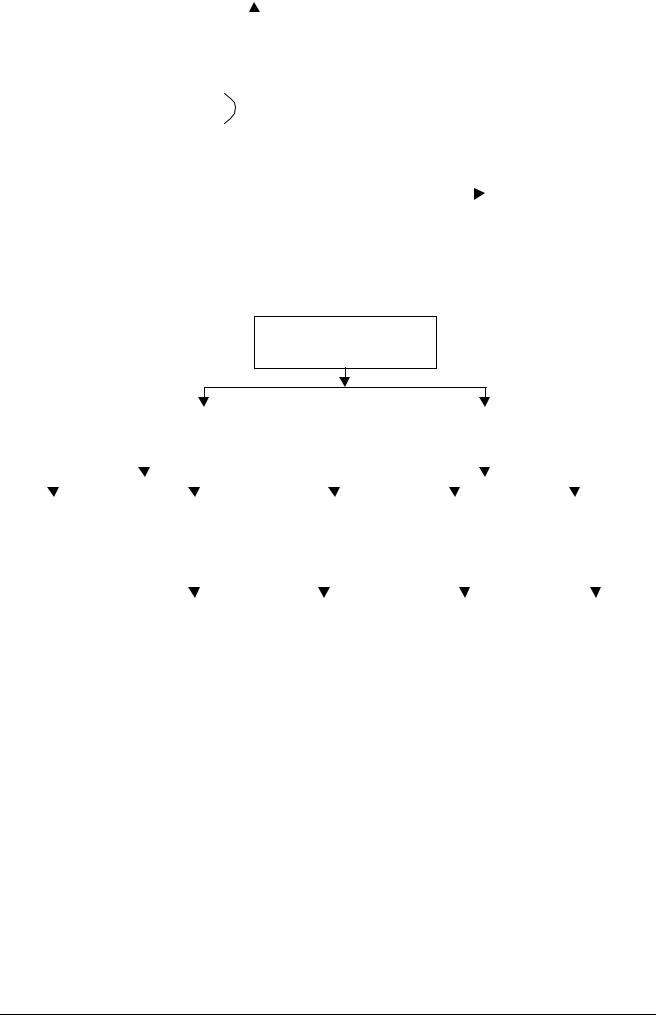
По принципам реализации известные алгоритмы размещения можно разделить на алгоритмы, использующие непрерывно-дискретные и дискретные методы оптимизации (рис.2). Эффективность того или иного алгоритма обычно оценивают по результатам решения типовых конструкторских задач.
32
88 / 99
Лекции по КТОП
Y
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
3 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
5 |
|
6 |
|
7 |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
y* |
|
|
|
9 |
|
10 |
|
11 |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
13 |
|
14 |
|
15 |
|
16 |
|
|
X |
||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
x* |
|
|
|
|
|
|
a |
||||
|
|
|
|
|
|
|
|
|
|
||||||
Рис.1
Алгоритмы размещения элементов
|
Непрерывно-дискретные |
|
|
Дискретные методы |
||||
|
|
методы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Градиентные |
|
Построение |
|
Алгоритмы |
|
Алгоритмы |
|
Эвристические |
|||||
методы |
|
динамических |
|
случайного |
|
назначения |
|
алгоритмы |
|||||
оптимизации |
|
моделей |
|
поиска |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Линейное |
|
Квадратичное |
|
Алгоритмы |
|
Алгоритмы |
назначение |
|
назначение |
|
парных |
|
последоват. |
|
|
|
|
перестановок |
|
установки |
|
|
|
|
|
|
элементов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.2
33
89 / 99
Лекции по КТОП
Лекция №7 21.11.2002г.
Компьютерное принятие проектных решений в CAD/CAM/CAEсистемах электронной техники
1. Поддержка принятия решений
Конструктор при принятии проектных решений исходит как из субъективных представлений об эффективности возможных альтернатив и важности различных критериев оценки качества принимаемых решений, так и на основе объективных составляющих, к которым относятся наличие математических моделей оценки численности значения критериев и ограничения, накладываемые на параметры решения. Увеличение объема информации, поступающей к конструкторам, усложнение решаемых задач, необходимость учета большого числа взаимосвязанных факторов обуславливают применение компьютерной техники. Эти системы получили название систем поддержки принятия решений. Системы поддержки принятия решений являются человеко-машинными объектами, которые позволяют лицу, принимающему решение, использовать данные, знания, объективные и субъективные модели для анализа и решения слабо структурированных и неструктурированных проблем. К слабо структурированным относят задачи, которые содержат количественные и качественные оценки, и качественные преобладают. Неструктурированные задачи имеют только качественное описание. Человеко-машинная процедура принятия решения в CAD/CAM/CAE-системах представляет собой итеративный процесс взаимодействия конструктора и компьютера. Система поддержки принятия решений в CAD/CAM/CAE решает следующие задачи:
1.Генерация возможных вариантов конструкторских решений и проектных стратегий.
2.Осуществляет оценку вариантов и выбирает лучший (рациональный).
3.Обеспечивает постоянный обмен информацией между конструкторами о принимаемых решениях и помогает согласовывать групповые решения.
4.Моделирует принимаемые решения (когда возможно). При отсутствии аналитической модели могут использоваться методы статистической обработки результатов предыдущих проектов.
5.Оценивает соответствие выполнения принятых конструкторских решений намеченным целям.
2.Возможности, предоставляемые конструкторам системой поддержки принятия решений при проектировании сложных объектов.
1.Комплексная автоматизация проектирования от разработки структуры проектируемого объекта до выдачи рабочих чертежей, а также технологическая подготовка производства. При этом система поддержки принятия решений позволяет преодолевать «узкие места» в процессе проектирования объекта. Пример: прогностическая оценка вариантов проектного решения, анализ сложности задачи трассировки, учет особенностей технологии производства в процессе разработки изделия. Именно применение системы поддержки принятия решений, особенно на этапе аванпроектирования, делает возможным внедрение технологий нисходящего, сквозного и параллельного проектирования.
2.Увеличение числа проработанных вариантов проекта на всех уровнях проектирования с возможностью выбора наиболее рационального варианта. При
этом система поддержки принятия решений берет на себя как процедуру
90 / 99