

Лабораторный практикум / Лаборатория радиофизики / - ПМФ - / 2 - Моделирование и исследование линейных систем / 2 - Описание
.pdfСАНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ФИЗИЧЕСКИЙ ФАКУЛЬТЕТ
НАПРАВЛЕНИЕ «ПРИКЛАДНЫЕ МАТЕМАТИКА И ФИЗИКА»
Описание лабораторной работы
МОДЕЛИРОВАНИЕ И ИССЛЕДОВАНИЕ ЛИНЕЙНЫХ СИСТЕМ
Санкт-Петербург
2008 г.
Оглавление |
|
Введение......................................................................................................................................... |
3 |
Линейные системы ........................................................................................................................ |
3 |
Временной метод........................................................................................................................... |
4 |
Частотный метод ........................................................................................................................... |
6 |
Связь частотного и временного методов..................................................................................... |
8 |
Методы измерения характеристик линейных цепей.................................................................. |
9 |
Лабораторная установка ............................................................................................................. |
10 |
Обработка результатов................................................................................................................ |
11 |
Задания ......................................................................................................................................... |
16 |
Литература ................................................................................................................................... |
17 |
2
Введение
Целью данной работы является практическое освоение основных методов анализа линейных систем – временного и частотного. Для изучения основных особенностей применения указанных методов выбраны простейшие линейные системы – RC-фильтры первого порядка. Более сложные случаи рассматриваются в работах №3 «Активные фильтры», №4 «Усилители и генераторы низкочастотных сигналов» и №5 «Исследование колебательных контуров с индуктивной связью».
Работа состоит из двух этапов. На первом этапе выполняется компьютерное моделирование линейных систем. В качестве среды моделирования используется MATLAB и его пакеты расширения
SignalProcessingTooldox, Simulink, SimPowerSystem. С использованием этих программных средств строятся амплитудно-частотные, фазо-частотные, переходные и импульсные характеристики фильтров, моделируется прохождение через фильтры типовых сигналов.
На втором этапе работа фильтров исследуется экспериментально. Студенты самостоятельно спаивают рассчитанные фильтры и проводят измерения некоторых величин. Результаты компьютерных расчетов сравниваются с полученными экспериментальными данными. Измерения выполняются как с использованием аналоговых, так и цифровых приборов. В последнем случае используется возможность записи данных в файл и их дальнейшей обработки в MATLAB.
Линейные системы
Под линейными понимают такие системы, параметры которых не зависят от величины распространяющихся в них сигналов. Строго говоря, любая система является нелинейной, однако в случае распространения малых сигналов нелинейными эффектами, как правило, можно пренебречь.
Если размеры системы достаточно малы (по сравнению с длиной волны распространяющихся в ней сигналов), то можно не учитывать волновой характер протекающих в ней процессов, в частности излучение сигнала в окружающее пространство, и ввести понятие системы с сосредоточенными параметрами – сопротивлениями, конденсаторами и индуктивностями. В дальнейшем в этой работе мы будем рассматривать только линейные системы с сосредоточенными параметрами.
Процессы, протекающие в линейных системах, описываются линейными дифференциальными уравнениями, которые получаются из системы уравнений Кирхгофа для контуров и узлов. В общем случае для линейной системы с сосредоточенными параметрами дифференциальное уравнение имеет следующий вид:
A y |
(n)(t )+ K + A y′(t )+ A y(t ) = B x(n)(t )+ K + B x′(t )+ B x(t ) |
(1) |
||||
n |
1 |
0 |
n |
1 |
0 |
|
где y(t) – выходной сигнал при произвольном входном воздействии x(t).
3
Порядок дифференциального уравнения определяет порядок линейной системы. Заметим, что порядок дифференциального уравнения не может превышать число реактивных элементов в схеме.
Из курса математики известно, что общее решение y(t) дифференциального уравнения (1) представляет собой сумму общего решения y1(t) однородного уравнения
A y(n) + K + A y' + A y = 0 |
(2) |
||
n |
1 |
0 |
|
с ненулевыми начальными условиями
y(0) = a1 , y'(0) = a2 , K, yn−1(0) = an
ичастного решения y2(t) неоднородного уравнения (1) с нулевыми начальными условиями. Другими словами, выходной сигнал можно представить в виде суммы реакций системы на ненулевые начальные условия
ина входной сигнал. Ненулевые начальные условия реализуются тогда, когда к моменту включения входного сигнала t=0 в реактивных элементах схемы (индуктивностях и емкостях) была запасена энергия. Такие случаи встречаются достаточно редко, и мы в дальнейшем будем предполагать
начальные условия нулевыми, поэтому y1(t)ª0 и, следовательно, y(t)=y2(t), т. е. источником выходного сигнала является только входное воздействие.
Опираясь на принцип суперпозиции, можно решить задачу о том, как в общем виде определить выходной сигнал y(t) при произвольном входном воздействии x(t) для произвольной линейной системы. Принцип суперпозиции заключается в следующем: если на вход линейной системы
воздействуют одновременно несколько сигналов x1, x2, …, x n, то выходной сигнал будет представлять собой сумму сигналов y1, y2, …, y n, где yk есть реакция системы на входное воздействие xk при отсутствии остальных.
Эту задачу можно решить в общем виде, если удастся представить входное воздействие в виде суммы "стандартных" сигналов и определить реакцию системы на это стандартное воздействие. Можно выделить два подхода к решению данной задачи: временной и частотный методы.
Временной метод
В этом случае задача определения сигнала на выходе линейной системы решается во временной области, свойства системы описываются ее импульсной или переходной характеристикой.
Возьмем сначала в качестве стандартных сигналов ступенчатую функцию 1(t-T), включаемую в момент времени t=T (Рис. 1,а). Любой входной сигнал можно представить в виде набора сигналов такой формы (Рис. 1,б). Очевидно, что нижний заштрихованный сигнал равен x(0)1(t).
4
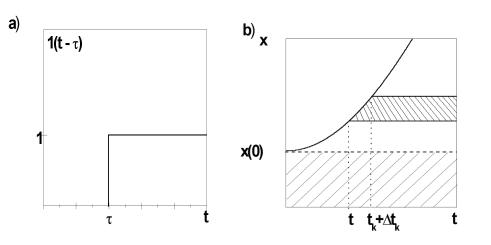
Рис. 1.
|
|
Верхний заштрихованный сигнал имеет амплитуду |
x'(t |
k |
) |
t |
и |
|||||||
|
|
|
|
|
||||||||||
поступает |
|
на |
|
вход |
системы при |
t=tk; следовательно, |
он |
|
|
равен |
||||
x'(t |
k |
)1(t − t |
k |
) |
t |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Таким образом, входной сигнал приближенно описывается следующей |
||||||||||||
суммой: |
|
|
|
x(t) ≈ x(0)1(t) + ∑ x '(tk )1(t − tk |
|
|
|
|
|
|
||||
|
|
|
|
|
|
) t |
|
|
|
|
(3) |
|||
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
Предположим, что |
нам известна |
реакция |
системы |
на входное |
|||||||||
воздействие в виде функции единичного включения x(t)=1(t). Обозначим такую реакцию y(t)=h(t) и назовем функцию h(t) переходной характеристикой линейной системы. О том, как ее можно найти и каковы ее свойства, будет сказано ниже.
Зная переходную характеристику системы, можно определить выходной сигнал. Используя представление x(t) в виде (3) и учитывая принцип суперпозиции, получим
y(t) ≈ x(0)h(t) + ∑ x '(tk )h (t − tk ) t
|
k |
(4) |
При стремлении |
t → 0 нужно заменить сумму |
соответствующим |
интегралом, и мы получим точное выражение для выходного сигнала |
||
|
t |
|
|
y(t) = x(0)h(t) + ∫ x '(τ )h (t −τ )dτ |
(5) |
|
0 |
|
Данное выражение, называемое интегралом Дюамеля, дает нам решение поставленной задачи.
В качестве другого стандартного входного воздействия выберем сигнал
прямоугольной формы длительности t , |
площадь которого равна 1, т. е. |
амплитуды 1/ t (Рис. 2а). Обозначим |
его δ t (t) . Реакцию линейной |
системы на такое воздействие обозначим g t (t) . 5

Рис. 2
Заштрихованная часть входного сигнала, представленного на Рис. 2б,
может быть записана так: x(tk )δ t (t − tk ) |
t , а сам входной сигнал: |
x(t) ≈ ∑ x(tk )δ t (t − tk ) t |
|
k |
(6) |
Следовательно, приближенное выражение для выходного сигнала будет иметь вид:
y(t) ≈ ∑ x(tk )g t (t − tk ) t
k |
(7) |
При стремлении t → 0 |
функция δ t (t) перейдет в обычную δ - |
функцию δ (t) . Получающийся при этом выходной сигнал обозначим g(t) и назовем импульсной характеристикой системы. Тогда выражение для
выходного сигнала y(t) будет представлять собой свертку входного сигнала и импульсной характеристики системы:
t
y(t) = ∫ x(τ )g(t −τ )dτ
0 |
(8) |
Заметим, что как переходная, так и |
импульсная характеристики |
линейной системы представляют собой ее реакцию на входные воздействия, равные нулю при t < 0 . Следовательно, в силу принципа причинности
(сигнал на выходе не может появиться раньше, чем на входе) h(t) и g(t) также равны нулю при t < 0 .
Частотный метод
В этом случае задача решается с применением спектральных разложений. Способ замены произвольного входного сигнала суммой стандартных воздействий основан на представлении функции рядом или
6
интегралом Фурье. Предположим, что входной сигнал – периодическая функция с периодом T. Любой реальный периодический сигнал может быть представлен в виде ряда Фурье
|
|
|
|
|
|
|
|
|
A0 |
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t) = |
+ |
A cos(ω |
t ) + B |
sin (ω |
t ) |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
∑ |
n |
|
|
|
|
n |
n |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n−1 |
|
|
|
|
|
|
|
|
|
|
|
|
(9) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
A |
= |
2 |
T 2 |
x (t )cos(ω |
t )dt, |
B |
= |
2 |
T 2 |
x (t )sin (ω |
t )dt, |
ω |
|
= |
2π n |
. |
|||||||||||
|
|
n |
|
||||||||||||||||||||||||
n |
|
T −T∫2 |
|
|
n |
|
|
n |
|
|
T −T∫2 |
|
|
n |
|
|
|
|
T |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10) |
||
или в комплексной форме |
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
x (t ) = ∑ Dne−iωnt |
|
|
|
|
|
|
|
|
|||||||
|
D = |
|
|
|
|
eiωn |
|
|
|
|
n=−∞ |
|
|
|
|
|
|
|
(11) |
||||||||
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где |
|
n |
|
|
n |
|
– комплексная амплитуда, определяемая выражением |
||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Dn = |
|
∫ |
x(t )e |
−iωn t dt |
|
|
|
|
|
(12) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−T |
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Отдельные слагаемые в рядах (9) и (11) называют гармониками. Выходной сигнал может быть определен в общем виде, если нам известна реакция
системы на гармоническое входное воздействие e−iωt при всех значениях частоты.
Пусть на вход линейной системы подается гармоническое воздействие
x (t ) = Ae−iωt = |
|
A |
|
eiϕA e−iωt |
|
|
||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
. Сигнал |
на выходе |
обозначим следующим |
||
|
y (t ) = Be−iωt |
|||||||||||
образом: |
= |
|
B |
|
eiϕB e−iωt |
. Отношение |
комплексных амплитуд |
|||||
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||
выходного и входного гармонических сигналов называется коэффициентом передачи линейной системы
. |
ϕK |
ω |
|
|
B |
|
|
B |
|
( B |
|
A ) |
|
|
= = |
|
|
|
e |
|
|||||||
K (iω ) = K (ω )e |
) |
|
|
|
−ϕ |
||||||||
|
i |
( |
|
|
|
|
|
|
|
i ϕ |
|
||
|
|
|
|
|
A |
|
|
A |
|
|
|
|
(13) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Следовательно, модуль коэффициента передачи равен отношению амплитуды сигнала на выходе |B| к амплитуде сигнала на входе |A|, а его фаза
равна разности фаз указанных сигналов. Зависимость K (ω) называется
амплитудно-частотной характеристикой линейной системы (АЧХ), а фазо-частотной характеристикой (ФЧХ).
Если коэффициент передачи известен, то в силу принципа суперпозиции мы можем записать следующее выражение для выходного сигнала:
y(t ) = ∑ Dn K (iωn )e |
i ωn t |
(14) |
|
n
7

Если на вход линейной системы подается непериодический сигнал, то его следует представить в виде интеграла Фурье
|
1 |
|
∞ |
∞ |
|
|
||
x(t) = |
|
∫ X (iω )eiωt dω, X (iω ) = ∫ x(t)e−iωt dt |
|
|||||
2π |
|
|||||||
|
−∞ |
−∞ |
|
(15) |
||||
|
|
|
|
|
||||
или в виде интеграла Лапласа |
|
|
|
|||||
|
|
1 |
|
σ +i∞ |
∞ |
|
|
|
x(t) = |
|
∫ X ( p)e pt dp, X ( p) = ∫ x(t)e− pt dt |
|
|
||||
2π i |
|
|
||||||
|
|
σ −i∞ |
0 |
. |
(16) |
|||
|
|
|
|
|
||||
Зная коэффициент передачи, можно определить спектр выходного сигнала
. |
. |
Y (iω ) = K (iω ) X (iω ), или |
Y ( p) = K ( p) X ( p). |
и, следовательно, сам сигнал
∞
y(t) = 1 ∫ K. (iω )X (iω )eiωt dω,
2π −∞
или в терминах преобразования Лапласа
|
1 |
σ +i∞ . |
||
y(t) = |
∫ |
K ( p) X ( p)e pt dp. |
||
2π i |
||||
|
σ −i∞ |
|
||
|
|
|
||
(17)
(18)
(19)
Связь частотного и временного методов
Итак, реакция линейной системы на произвольное внешнее воздействие может быть определена с помощью формул (5), (8), (14), (18), (19), если известна переходная или импульсная характеристики линейной системы, либо ее коэффициент передачи. Каждая из трех функций
h(t), g(t) и K (iω ) полностью определяют свойства линейной системы. Очевидно, что они взаимосвязаны. Коэффициент передачи и импульсная характеристика связаны между собой преобразованием Фурье:
g(t) = 1 |
|
∞ |
K (iω )eiωt dω, |
|
|
∫ |
|||
|
|
|
|
. |
|
2π |
−∞ |
(20) |
|
|
|
|
||
. |
|
|
∞ |
|
|
= ∫ g(t)e−iωt dt, |
|||
K (iω) |
||||
|
|
|
0 |
(21) |
а импульсная характеристика представляет собой производную от переходной характеристики
|
dh(t) |
t |
|
|
g(t) = |
, или h(t) = ∫ g(τ )dτ . |
|
||
dt |
(22) |
|||
|
0 |
|||
|
|
|||
|
|
8 |
|
Итак, для решения задачи о прохождении сигнала произвольной формы через линейную систему с сосредоточенными параметрами можно предложить два метода:
1. Теоретически или экспериментально определить переходную h(t) или импульсную g(t) характеристику линейной системы и с помощью
выражений (5) или (8) рассчитать выходной сигнал; либо решить дифференциальное уравнение (1) непосредственно. В этом случае задача решается в терминах переменной t , поэтому такой метод называется временным.
2. Теоретически или экспериментально определить комплексный
коэффициент передачи & ( ω ) ; рассчитать амплитуды спектральных
K i
составляющих входного сигнала Dn для периодического сигнала или спектральную функцию X (iω ) для непериодического сигнала,
воспользовавшись выражениями (14) или (18), (19), определить выходной сигнал. В этом случае входной сигнал задается своим спектром, а свойства линейной системы передаются функцией частоты – коэффициентом передачи. Поэтому такой метод расчета выходного сигнала называется спектральным (частотным).
В лабораторной работе необходимо рассмотреть свойства простейших RC-цепей, используя как частотный, так и временной метод их анализа.
Методы измерения характеристик линейных цепей
Обсудим вопрос о том, как характеристики линейной цепи могут быть найдены экспериментально.
1. Коэффициент передачи. Для того чтобы определить коэффициент передачи K (iω) , нужно подать на вход системы гармонический сигнал A cos(ωt) и измерить параметры выходного сигнала, который в силу линейности системы также будет гармоническим B cos(ωt +ψ ) . Отношение амплитуд выходного и входного сигналов будет равно модулю коэффициента передачи на данной частоте, а разность фаз сигналов – фазе коэффициента передачи (13). Проведя такие измерения в выбранном диапазоне частот, мы узнаем АЧХ и ФЧХ системы в этом диапазоне.
2. Переходная характеристика h(t). По определению переходной характеристики, для ее измерения, нужно подать на вход системы единичное ступенчатое воздействие (функцию Хэвисайда) 1(t) , тогда сигнал на выходе будет представлять собой функцию h(t). На практике вместо такого входного сигнала подают последовательность прямоугольных импульсов, выбирая длительность импульса достаточно большой так, чтобы к моменту выключения импульса можно было считать переходные процессы в цепи практически закончившимися (т.е. чтобы напряжения на всех элементах и токи через них приняли к этому времени установившиеся значения).
9

3. Импульсная характеристика δ (t) . Чтобы экспериментально определить импульсную характеристику, нужно подать на вход системы воздействие, близкое к δ -функции. В качестве критерия "близости" сигналов можно выбрать критерий близости их спектров. Так как спектр δ -функции есть константа во всем диапазоне частот, то для определения импульсной характеристики нужно выбрать такой сигнал, спектральная плотность которого неизменна в достаточно широком диапазоне частот. Поясним это подробнее. Пусть нам необходимо определить импульсную характеристику фильтра нижних частот, АЧХ которого представлена на Рис. 3,а.
Рис. 3. Выбор характеристик входного сигнала для измерения δ (t) .
Возьмем в качестве входного импульсный сигнал прямоугольной формы единичной амплитуды и длительности τ И . Выражение для его спектра имеет вид (Рис. 3,б):
X (iω) = |
1 − e−iωτ И |
|
X (iω) |
|
= |
|
sin(ωτ И /2) |
|
(23) |
|||
|
|
|
|
|||||||||
|
|
|
|
|||||||||
|
|
|
и |
|
|
|
|
|
||||
|
iω |
|
|
|
|
ωτ И /2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
Положение первого |
|
нуля |
|
модуля |
спектральной функции |
|||||||
X (iω) определяется длительностью сигнала ω1 = 2π /τ И . Если этот нуль находится по оси частот существенно дальше граничной частоты фильтра ω0
(частоты, на которой модуль коэффициента передачи в 
 2 раз меньше максимума) (Рис. 3,в), то в полосе пропускания фильтра спектр входного сигнала будет практически постоянным. Это означает, что такой входной сигнал может приближенно считаться δ -функцией для данной системы, а соответствующий ему выходной сигнал – импульсной характеристикой.
2 раз меньше максимума) (Рис. 3,в), то в полосе пропускания фильтра спектр входного сигнала будет практически постоянным. Это означает, что такой входной сигнал может приближенно считаться δ -функцией для данной системы, а соответствующий ему выходной сигнал – импульсной характеристикой.
Лабораторная установка
Блок-схема лабораторной установки показана на Рис. 4.
10