

Автоматическое управление расходом жидких и сыпучих веществ
Расходом вещества обычно называют количество вещества (массы или объема), проходящее через определенное сечение канала (трубопровода) в единицу времени, а приборы или компоненты приборов, определяющие расход вещества в единицу времени, называют расходомерами. Расходомер может быть снабжен счетчиком (интегратором), показывающим массу или объем вещества, прошедшего через прибор за какой-либо промежуток времени. Единицы измерения расхода могут быть объемные - м3/ч, м3/мин, л/мин, и т. д. и массовые - кг/ч, т/ч, и т. д. В зависимости от принципа действия, наиболее часто применяемые в промышленности приборы для измерения расхода вещества, можно разделять на следующие группы: постоянного и переменного перепада давления, тахометрические, электромагнитные, ультразвуковые и различные конструкции специальных.
1. Расходомеры обтекания
|
|
К этим расходомерам относятся приборы, чувствительные элементы которых обтекаются потоком. Наибольшее распространение получили расходомеры постоянного перепада давления, у которых перепад давления измеряемого вещества на чувствительном элементе на всём диапазоне измерений с некоторым приближением можно считать постоянным. К этой группе приборов относятся ротаметры (см. рис.1).Выпускают ротаметры для местного измерения расхода без дистанционной передачи показаний, с электрической дистанционной передачей показаний без местной шкалы, с пневматической дистанционной передачей и местной шкалой показаний. Широко применяются для измерения малых расходов жидкостей и газов. Основными элементами ротаметра для местного измерения расхода являются расширяющаяся кверху вертикальная конусная трубка - 1 (длинна трубки обычно не менее чем в 10 раз превышает ее диаметр) и поплавок - 2, находящийся в потоке измеряемого вещества внутри трубки. . |
|
Рис.1. Схема ротаметра с конической трубкой. |
Принцип действия ротаметров (стеклянных и металлических) основан на восприятии динамического напора потока измеряемой среды чувствительным элементом ротаметра - поплавком, помещённым в коническую трубку, по которой вверх проходит поток измеряемой среды
По мере повышения расхода через ротаметр поплавок перемещается вверх. При изменении положения поплавка сечение между ним и внутренней стенкой конической трубы изменяется, что ведёт к изменению скорости потока в проходном сечении, а, следовательно, к изменению перепада давления на поплавке. Перемещение поплавка происходит до тех пор, пока перепад давлений не станет равным массе поплавка, приходящейся на единицу площади его поперечного сечения. Каждому значению расхода среды, проходящему через ротаметр при определённой плотности и кинематической вязкости, соответствует определённое положение поплавка. Поплавок можно визуально контролировать по всему диапозону его применения. Равновесное состояние поплавка, соответствующее его определенному положению по вертикали, однозначно характеризует расход. Ратометры предназначены для измерения объемного расхода плавноменяющихся однородных потоков чистых и слабо загрязненных жидкостей и газов с дисперсными включениями инородных частиц. К основным преимуществам ротаметров можно отнести простоту конструкции, возможность измерения малых расходов, значительный диапазон измерения, возможность измерения расхода агрессивных сред, достаточно равномерную шкалу. Недостатками ротаметров являются большая чувствительность к температурному изменению вязкости (особенно при малых расходах), невозможность измерения расхода загрязненных жидкостей и жидкостей, из которых выпадает осадок. На заводе - изготовителе ротаметры тарируются по воде или воздуху. Для применения ротаметров на других средах требуется индивидуальная градуировка. Промышленный ротаметр для местного измерения расхода (рис. 2) представляет собой коническую трубку 2 из стекла (или органического стекла), закрепленную в металлических головках 5, которые стянуты шпильками 4, образующими защитную решетку вокруг стекла. В трубке 2 свободно перемещается поплавок 1. Движущийся поток измеряемого вещества, проходя по косым прорезям, имеющимся в верхней части поплавка, вращает его, благодаря чему, поплавок центрируется в трубке. Шкала 3 прибора (условно в процентах) нанесена непосредственно на стеклянную трубку. Отсчет показаний прибора производят по острой верхней кромке поплавка.
|
|
|
|
Рис.2. Ротаметр |
Рис.3. Схема работы ротаметра |


Ротаметры с электрической дистанционной передачей показаний являются бесшкальными датчиками, предназначенными для измерения расхода жидкости, нейтральной к стали 12Х18Н9Т и преобразования величины расхода в электрический унифицированный сигнал. Для этого типа приборов минимальный расход среды, который может быть надежно измерен, составляет 20% максимального значения измеряемого расхода. Прибор состоит из двух основных частей - ротаметрической и электрической, которые трубкой разделены между собой. Основным элементом ротаметрической части является конический поплавок, перемещающийся внутри кольцевой диафрагмы или грибообразный поплавок, движущийся внутри вертикально расположенной конической трубки. Электрическая часть состоит из индукционной катушки с сердечником, жестко связанным с поплавком. Катушка включена в дифференциально-трансформаторную схему вторичного прибора. Под действием потока измеряемого вещества поплавок перемещается вверх и увлекает за собой плунжер индукционного датчика. Перемещение плунжера приводит к дисбалансу дифференииально-трансформаторной схемы, и на вторичный прибор поступает сигнал, пропорциональный измеряемому расходу. Конструктивно ротаметр представляет собой стальной корпус с камерой, внутри которой имеется кольцевая диафрагма и поплавок со стержнем. В верхней части корпуса имеется направляющая трубка с насаженой на неё индукционной катушкой, закрытой кожухом. Под кожухом имеется регулировочная гайка, вращением которой производят перемещений индукционной катушки при градуировке ротаметра. На верхнем конце стержня закреплён плунжер индукционного датчика. Под действием потока измеряемого вещества поплавок перемещается вверх и увлекает за собой плунжер индукционного датчика. Перемещение плунжера приводит к разбалансу дифференциально-трансформаторной схемы, и на вторичный прибор поступает сигнал, пропорциональный измеряемому расходу. Ниже приведено описание принципа работы ротаметра РЭ с дифференциально-трансфарматорным выходом включает в себя ротаметр электрический РЭ-16 и вторичный дифференциально - трансформаторный прибор типа КСД-3. Схема лабораторной установки приведена на рис. 4. Ротаметр типа РЭ-16 разрезан для того, чтобы было видно его устройство. Для перемещения поплавка 1 относительно дискового седла 2 служит винт 3 с нарезанной на нем резьбой. Вращая ручку 4 можно поднимать или опускать площадку 5, на которую опирается стержень 6, связанный с поплавком 1 и сердечником 7 дифференциально - трансформаторного датчика 8. Вторичный прибор 9 типа КСД -3 включает в себя электронный усилитель ЭУ, реверсивный двигатель РД, кинематически связанный с кулачком 10 и стрелкой прибора, а также дифтрансформаторный датчик 11, аналогичный датчику 8. Сердечник 12 дифтрансформаторного датчика 11 прибора КСД-3 может перемещаться при вращении кулачка 10. К первичным обмоткам датчиков 8 и 11 подводится переменное напряжение 24 В с частотой 50 Гц. Вторичные обмотки датчиков 8 и 11 включены встречно друг к другу. Если сердечники 7 и 12 находятся в одинаковых положениях то сигналы в них равны по амплитуде и противоположны по фазе. В этом случае на вход усилителя ЭУ сигнал не поступает и реверсивный двигатель РД не вращается При изменение расхода жидкости поплавок 1 переместится относительно дискового седла 2, а вместе с ним переместится сердечник 7. В результате сигнал во вторичной обмотке датчика 8 станет отличаться от сигнала датчика 11. Сигнал разбаланса поступит на усилитель ЭУ, усилится и приведёт во вращение реверсивный двигатель РД, который посредством кулачка 10 переместит сердечник 12 в такое новое положение, в котором сигналы во вторичных обмотках датчиков 8 и 11 станут равны по амплитуде и противоположны по фазе. В результате сигнал на входе усилителя ЭУ станет равен нулю и схема придёт в равновесие.
|
|
Ротаметры с пневматической дистанционной передачей и местной шкалой показаний выпускают четырёх типов: типа РП для измерения расхода жидкостей, нейтральных к стали 12Х18Н9Т, типа РПФ для измерения расхода агрессивных жидкостей, нейтральных к фторопласту-4, типа РПО с паровым обогревом для измерения расхода кристаллизующихся жидкостей, нейтральных к стали 10Х17Н13М2Т, типа РПФ-И, которые являются индикаторами и применяются для контроля расхода агрессивных жидкостей, нейтральных к фторопласту-4. Все эти 4 типа приборов предназначены для измерения расхода жидкости и преобразования его в дифференцированный выходной сигнал 0,02 - 0,1 МПа, подоваемый на вторичный прибор. Ротаметр с пневматической дистанционной передачей и местной шкалой показаний состоит из двух основных частей - ротаметрической и пневматической. Ротаметрическая часть прибора представляет собой прямоточную трубу, в которой находятся мерительный конус и, перемещающийся под воздействием измеряемого потока, поплавок с хвостовиком, направленным вверх и имеющим дополнительное центрируещее устройство. |
|
Рис. 4. Схема лабораторной установки |

К корпусу ротаметрической части крепят пневмоголовку, обеспечивающую местные показания и преобразование высоты положения поплавка в пневматический сигнал, который поступает к вторичному прибору.
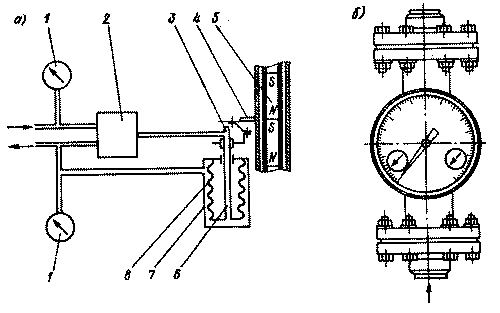
Преобразование высоты положения поплавка в пневматический сигнал осуществляется с помощью магнитопневматического преобразователя. При перемещении сдвоенных магнитов 5,
|
|
встроенных в хвостовик поплавка, изменяется положение находящегося в пневмоголовке следящего магнита 4 и жёстко связанной с ним заслонки сопла 3. Изменение зазора между соплом и заслонкой вызывает изменение давления в пневмоусилителе 2. Усиленный по мощности сигнал поступает на выход прибора и в стакан 7. Вследствие этого, сильфон 8 сжимается или разжимается, перемещая шток 6, с закреплённым на его конце соплом 3. Перемещение будет происходить до тех пор, пока следящий магнит с заслонкой не займёт первоначальное положение относительно сдвоенных магнитов. Перемещение штока 6 с помощью кинематической передачи преобразуется во вращательное движение стрелки, шкала местных показаний - 100%-ная равномерная. Выходное давление и давление питания контролируются по манометрам 1.
|
|
Рис.6. Ротаметр с пневматической дистанционной передачей данных: а) - схема магнитопневматического преобразователя; б) - внешний вид |
|
При перемещении поплавка из нижнего положения, соответствующего отсутствию расхода, в верхнее положение, соответствующее верхнему пределу измерения, давление на выходе прибора изменяется от 20 до 100 кПа. Кроме соблюдения общих требований к месту расположения приборов, фланцевым соединением и т. п., следует учитывать, что ротаметры должны устанавливаться на трубопроводах, не подверженных вибрации, так как возможно повреждение рота метрической части и возникновение дополнительных погрешностей. Следует предусмотреть обводную линию (байпас) с запорными вентилями для возможного отключения прибора без перекрытия потока жидкости в трубопроводе. Направление потока среды должно быть таким, чтобы она входила в вертикальный патрубок и выходила из горизонтального (ротаметры РЭ) и снизу вверх (ротаметры РС, РП, РПО). Ротаметры устанавливаются строго в вертикальном положении во избежание закливания поплавка или штока, возможно дальше от побудителей расхода. |
|
|
Рис.7. Работа ротаметра с пневматической дистанционной передачей данных |

Работы по наладке ротаметров состоят из индивидуального опробования и собственно наладки систем измерения. При наладке систем измерения расхода требуемую точность измерения проверяют сравнением показаний прибора систем измерения с непосредственными измерениями расхода или данными, полученными расчётом. При отклонениях показаний системы измерений от расчётных проверяют все элементы смонтированной системы, включая и линии связи, устраняют неисправности и повторно включают систему в работу. Налаженные системы измерения в большинстве случаев проходят испытания на точную и безаварийную работу, в течение определенного времени, обычно не более 3 суток. В процессе испытаний проводятся эксплутационные операции с приборами: контроль работы, смазка, продувка мест отбора импульсов, заправка чернилами и т. п.