

3.3 Анализ чувствительности типовой системы управления к изменениям параметров объекта.
В общем случае,
объект управления является нестационарным,
то есть со временем может изменять
свойства и структуру. Поэтому синтез
управляющей системы по расчету настроечных
параметров алгоритма управления должен
быть адаптивным. Необходимость в
адаптации обосновывается анализом
чувствительности, который заключается
в исследовании изменения надежности и
качества управления при изменении
параметров объекта и неизменяемых
настроечных параметрах управляющей
системы. Модель объекта управления
характеризуется параметрами:
![]() которые принимаются на номинальные и
используются в расчете управляющей
системы:
которые принимаются на номинальные и
используются в расчете управляющей
системы:
Поэтому при
изменении параметров объекта
![]() пропорционально должны изменяться
настроечные параметры управляющей
системы:
пропорционально должны изменяться
настроечные параметры управляющей
системы:

Такие настроечные параметры называются адаптивными, позволяют оптимизировать управление при любых изменениях объекта, однако требуют периодической идентификации модели объекта. В случае нечувствительности системы к таким изменениям не имеет смысла реализовывать дополнительные затраты на алгоритмизацию. Рассмотрим актуальность такой адаптации, анализ произведем по изменению надежности.
Методика анализа:
Анализ проводится в отдельности для параметров модели объекта
 .
В качестве
.
В качестве выбираются граничные условия по условию
задачи или
выбираются граничные условия по условию
задачи или от номинального значения параметра:
от номинального значения параметра:
![]()
Каждый диапазон изменения разбивается на исследуемые участки не меньше 5 дискретов, то есть разбиваем диапазон
 .
.Для каждого выделенного диапазона по исследуемому параметру при условии, если остальные принимаются номинальными, проводится исследование устойчивости системы или определяются показатели качества управления без изменения настроечных параметров управляющей системы.
 .
.
Проводим исследование по каждому параметру:
 ;
для каждого случая
;
для каждого случая
 строим годограф и определяем запасы
устойчивости
строим годограф и определяем запасы
устойчивости и
и :
:
|
ω |
0 |
0,01 |
0,05 |
0,1 |
0,5 |
1 |
1,05 |
1,5 |
2 |
2,5 |
3 |
|
А(ω) |
0,00 |
10186,70 |
407,47 |
101,87 |
4,08 |
1,02 |
0,93 |
0,46 |
0,26 |
0,17 |
0,12 |
|
φ(ω) |
0,00 |
-0,01 |
-0,06 |
-0,13 |
-0,65 |
-1,30 |
-1,36 |
-1,94 |
-2,58 |
-3,21 |
-3,83 |
Результаты исследования построим на графике (рисунок 21):
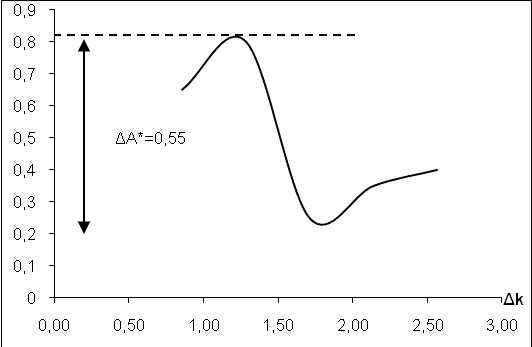


Рисунок
21 - Графики запасов устойчивости
![]() и
и![]() по
по![]()
Увеличение
коэффициента передачи объекта
![]() приводит к изменению запаса
приводит к изменению запаса![]() и
и![]() ,
то есть потере надежности. Таким образом,
система управления чувствительна к
изменению коэффициента передачи
,
то есть потере надежности. Таким образом,
система управления чувствительна к
изменению коэффициента передачи![]() по
по![]() на 50%, а по
на 50%, а по![]() чувствительна на
чувствительна на![]() .
.
 ;
для каждого случая
;
для каждого случая
 строим годограф и определяем запасы
устойчивости
строим годограф и определяем запасы
устойчивости и
и :
:
|
ω |
0 |
0,01 |
0,05 |
0,1 |
0,5 |
1 |
1,05 |
1,5 |
2 |
2,5 |
3 |
|
А(ω) |
0,00 |
10186,70 |
407,47 |
101,87 |
4,08 |
1,02 |
0,93 |
0,46 |
0,26 |
0,17 |
0,12 |
|
φ(ω) |
0,00 |
-0,01 |
-0,06 |
-0,13 |
-0,65 |
-1,30 |
-1,36 |
-1,94 |
-2,58 |
-3,21 |
-3,83 |
Результаты исследования построим на графике (рисунок 22):


Рисунок
22 - Графики запасов устойчивости
![]() и
и![]() по
по![]()
Увеличение
коэффициента передачи объекта
![]() не приводит к изменению запаса
не приводит к изменению запаса![]() и
и![]() ,
то есть потере надежности. Таким образом,
система управления не чувствительна
к изменению коэффициента передачи
,
то есть потере надежности. Таким образом,
система управления не чувствительна
к изменению коэффициента передачи![]() по
по![]() и по
и по![]() (
(![]() *
=0;
*
=0;![]() *=0).
*=0).
Таким образом, система нечувствительна к изменениям настроечных параметров, значит, не имеет смысла реализовывать дополнительные затраты на алгоритмизацию.