

Туголуков Е.Н. - Матем. моделирование технологического оборудования [2004]
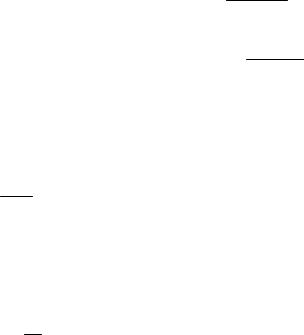
.pdfРис. 5.1 Полый ограниченный цилиндр с переменными температурами |
|
окружающей среды со |
|||||||||||||||||||
стороны боковых поверхностей |
|
|
|
|
|
|
|
|
|
|
|
|
(5.2) |
||||||||
|
|
|
|
t(x, r, 0) = f (x, r) −tc0 ; |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
λ |
∂t(0, r, τ) +α |
t(0, r, τ) =0; |
α |
1 |
<0; |
|
|
|
|
(5.3) |
||||||||
|
|
|
|
∂ x |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
λ ∂t(l, r, τ) |
+α2 t(l, r, τ) =0; |
|
|
|
|
|
|
(5.4) |
|||||||||
|
|
|
|
|
∂ x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
λ |
∂t(x, R0 , τ) |
+α |
0 |
(t(x, R , τ)−t |
v |
(x, τ)+t |
c0 |
)= 0; α |
0 |
<0; |
(5.5) |
||||||||||
|
|
||||||||||||||||||||
|
|
∂r |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
λ |
|
∂t(x, R1, τ) |
+ α |
c |
(t(x, R , τ)−t |
(x, τ)+t |
c0 |
)= 0 . |
|
(5.6) |
||||||||||
|
|
|
|
||||||||||||||||||
|
|
|
|
∂r |
|
|
|
1 |
|
c |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для торцевых поверхностей могут быть выбраны иные граничные условия с соответствующей постановкой задачи.
Решение задачи (5.1) – (5.6) также может быть получено методом конечных интегральных преобразований, примененных последовательно по линейной и цилиндрической координате.
Для исключения координаты х используем формулу перехода к изображениям
l |
|
T (r, τ)= ∫t (x, r, τ)S(µ, x)dx; |
(5.7) |
0 |
|
где S(µ, x) – ядро интегрального преобразования, являющееся решением задачи с однородными граничными условиями:
d 2 S(x) |
|
= −µ2 S(x); |
(5.8) |
||||
|
|
d x |
|||||
|
|
|
|
||||
λ |
|
dS(0) |
+α S(0) =0; |
(5.9) |
|||
|
|
|
|||||
|
|
d x |
1 |
|
|||
|
|
|
|
||||
λ |
dS(l) |
|
+α2 S(l) =0 . |
(5.10) |
|||
d x |
|||||||
|
|
|
|
||||
Задача (5.8) – (5.10) с точностью до постоянного множителя имеет решение:
|
|
|
|
|
S(x) =sin(µx +ϕ) , |
где |
|
λµ |
|
(5.12) |
|
|
α |
|
; |
||
ϕ=−arctg |
|
||||
|
|
1 |
|
|
|
µn – n-й положительный корень уравнения
α3 sin (µl +ϕ)+λµcos (µl +ϕ)= 0.
Обратный переход может быть выполнен по формуле
∞ |
T (r, τ) S |
(µn , x) |
|
t (x, r, τ) = ∑ |
|
|
, |
Nn |
|
||
n =1 |
|
|
(5.11)
(5.13)
(5.14)
где
l |
|
(µn , x)dx= |
||
Nn =∫ S 2 |
||||
0 |
|
|
|
(5.15) |
|
|
1 |
||
= 0,5 |
|
|
|
|
l − |
µn |
(sin (µnl +ϕn )cos(µnl +ϕn )−sin (ϕn )cos(ϕn )) . |
||
|
|
|
|
|
В изображениях задача (5.1) – (5.6) имеет вид:
|
∂T (r, τ) |
|
2 |
|
∂2T (r, τ) |
|
1 |
∂T (r, τ) |
|
2 |
|
|
|
|
(5.16) |
|||
|
|
|
=a |
|
|
|
|
|
+ |
|
|
+µ |
|
T |
(r, τ) |
; |
||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
∂τ |
|
|
|
|
∂r |
|
|
|
r |
∂r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
T (r, 0) =∫(f (x, r) −tc0 )S (µ, x)dx ; |
|
|
|
(5.17) |
|||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
∂T (R0 , τ)+α |
0 |
(T (R |
, τ)−U (τ))= 0; |
|
|
|
(5.18) |
|||||||||
|
|
|
∂r |
|
|
|
|
0 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
λ |
∂T (R1, τ)+α |
c |
(T (R , τ)−W (τ))= 0, |
|
|
(5.19) |
|||||||||||
|
|
|
∂r |
|
|
|
1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
U (τ)= ∫(tv (x, τ)−tc0 )S (µ, x)dx; |
|
(5.20) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W (τ)=∫ |
(tc (x, τ)−tc0 )S (µ, x)dx. |
|
|
|
|
|
(5.21) |
||||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Теперь возможно исключение координаты r путем использования следующего интегрального преобразования
R1 |
|
|
|
|
V (τ)= ∫T (r, τ)r P (η, r)dr ; |
(5.22) |
|||
R0 |
|
|
|
|
с обратным переходом по формуле |
P(ηk , τ)V (τ) |
|
|
|
∞ |
|
|
||
T (r, τ)= ∑ |
, |
(5.23) |
||
|
||||
k =1 |
Zk |
|
||
причем P (η, r) является решением задачи

d 2P(r) |
+ |
1 d P(r) |
+η2 P(r) =0; |
||
d r2 |
r |
|
d r |
||
λ ∂P∂(rR0 )+α0 P(R0 )=0;
λ ∂P∂(rR1 )+αc P(R1 )=0.
Это решение с точностью до постоянного множителя имеет вид [3]:
P(r) = J0 (ηr) + AY0 (ηr) ,
где |
A = |
ηλ J1(ηR0 )−α0 J0 (ηR0 ) |
(5.28) |
|||||
|
|
|
|
|
, |
|||
−ηλ Y |
(ηR )+α |
0 |
Y |
(ηR ) |
||||
|
|
1 |
0 |
0 |
0 |
|
|
|
а ηk – k-й положительный корень уравнения
ηλJ1(ηR1 )−αc J0 (ηR1 ) |
ηλ J1(ηR0 )−α0 J0 (ηR0 ) |
||||||||
|
|
|
|
= |
|
|
|
|
. |
−ηλY |
(ηR )+α |
Y |
(ηR ) |
−ηλ Y |
(ηR )+α |
Y |
(ηR ) |
||
1 |
1 |
c 0 |
1 |
|
1 |
0 |
0 0 |
0 |
|
Тогда
(5.24)
(5.25)
(5.26)
(5.27)
(5.29)
R1
Zk = ∫rP2 (r)dr =
R0
R2 (( ( ) ( ))2 ( ( ) ( ))2 ) (5.30)
= 21 J0 ηk R1 + Ak Y0 ηk R1 + J1 ηk R1 + Ak Y1 ηk R1 −
R2 (( ( ) ( ))2 ( ( ) ( ))2 )
− 20 J0 ηk R0 + Ak Y0 ηk R0 + J1 ηk R0 + Ak Y1 ηk R0 .
Применяя преобразование (5.22) к задаче (5.16) – (5.19), переходим к новым изображениям:
d V (τ) |
|
α |
R2 |
|
|
α |
R2 |
|
|
|
|
+η2 a2 V (τ)= |
|
0 0 P(R |
)U (τ)+ |
|
c 1 P(R )W (τ); |
||
|
|
|
|
||||||
d τ |
k |
|
λ |
0 |
|
|
λ |
1 |
|
|
|
|
|
|
|
||||
R1 l
V (0) = ∫∫(f (x, r)−tc0 )S(x)r P(r)dx dr .
R0 0
Решением задачи (5.31) – (5.32) является функция
(5.31)
(5.32)
|
|
|
|
|
R1 l |
|
|
|
V (τ)=exp(−ηk2 a2 τ) |
∫∫(f (x, r)−tc0 )S(x)r P(r)dx dr + |
|
|
|||||
|
|
|
|
R0 0 |
|
|
|
|
|
α |
|
a2 R |
τ l |
|
|
|
|
+ |
|
0 |
λ |
0 P(R0 )∫∫(tv (x, τ)−tc0 )S(x)exp(ηk2 a2 τ)dx dτ + |
(5.33) |
|||
|
|
|
|
|
0 0 |
|
|
|
|
α |
|
a2 R |
τ l |
(tc (x, τ)−tc0 )S(x)exp(ηk2 a2 τ)dx dτ |
|
|
|
+ |
|
c |
λ |
1 P(R1 )∫∫ |
. |
|
||
|
|
|
|
|
0 0 |
|
|
|
Возврат к оригиналам выполняется по формуле
∞ ∞ |
V (τ) P(r) S(x) |
|
|
|
t(x, r, τ) =∑∑ |
. |
(5.34) |
||
|
||||
n=1 k =1 |
Nn Zk |
|
||
При расчете температурного поля элементарной области аппаратов, имеющих трубчатые элементы, целесообразно использовать рассмотренную задачу в упрощенной постановке, соответствующей условиям работы трубчатого элемента. В этом случае
∂t(x,r,τ) |
|
2 |
|
∂ |
2 |
t(x,r,τ) |
|
∂ |
2 |
t(x,r,τ) |
|
|
|
|
|
||
=a |
|
|
+ |
|
+ |
1 ∂t(x,r,τ) |
; |
||||||||||
∂τ |
|
|
|
|
|
2 |
|
|
|
2 |
r |
∂r |
|
||||
|
|
|
|
∂x |
|
|
|
∂r |
|
(5.35) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
0 ≤ x≤l, R0 ≤r ≤R1, τ >0;
t(x, r, 0) = f (x, r) −tc0 ;
∂t(0, r, τ) =0;
∂x
∂t(l, r, τ) =0;
∂x
λ∂t(x∂, R0 , τ) +α0 (t(x, R0 , τ) −tv (x, r
λ∂t(x∂, R1, τ)+αc (t(x, R1, τ)−tc ( r
|
(5.36) |
|
(5.37) |
|
(5.38) |
τ) +tc0 )=0; α0 <0; |
(5.39) |
x, τ)+tc0 )=0. |
(5.40) |
Методика решения остается прежней, но ряд формул приобретает упрощенный вид.
Формула (5.9): |
∂S(0) |
|
∂ x |
||
|
Формула (5.10): ∂∂Sx(l) = 0.
Формула (5.11): S(x) =cos (µx).
Формула (5.12): ϕ = 0.
Формула (5.13): µn = πln .
Формула (5.15):
l
Формула (5.17): T (r, 0) = ∫ f (x,
= 0. |
(5.41) |
(5.42)
(5.43)
(5.44)
(5.45)
|
l |
|
( |
µn , x)dx = 0,5 |
|
1 |
|
|
|
Nn =∫ S |
2 |
(5.46) |
|||||
|
|
|
||||||
|
|
l + |
µn |
sin (µnl )cos(µnl ) . |
||||
|
0 |
|
|
|
|
|
|
|
r) S (µ, x) dx . |
(5.47) |
|
|
|
|
|
||
0
l
Формула (5.20): U (τ) = ∫tv
0
l
Формула (5.21): W (τ) = ∫tc
0
R1 l
Формула (5.32): V (0) = ∫∫
R0 0
Формула (5.33):
(x, τ) S (µ, x) dx. (5.48)
(x, τ) S (µ, x) dx. (5.49)
f (x, r) S(x) r P(r) dx dr . |
(5.50) |
V (τ) = exp (−ηk2 a2 τ) |
|
R1 l |
|
∫∫ f (x, r) S(x) r P(r) dx dr + |
|
|
R0 0 |
|
|
α |
a2 R |
τ l |
|
+ |
|
0 λ |
0 P(R0 )∫∫tv (x, τ) S(x) exp (ηk2 a2 τ)dx dτ + |
(5.51) |
|
|
|
0 0 |
|
|
α |
|
a2 R |
τ l |
a2 |
τ)dx dτ |
|
|
+ |
|
c |
λ |
1 P(R1 )∫∫tc (x, τ) S(x) exp (ηk2 |
. |
|||
|
|
|
|
|
0 0 |
|
|
|
6 РЕШЕНИЕ ЗАДАЧИ СТАЦИОНАРНОЙ ТЕПЛОПРОВОДНОСТИ ДЛЯ СОСТАВНОГО КОНЕЧНОГО ЦИЛИНДРА
Решение данной задачи может быть использовано для расчета стационарных температурных полей и тепловых потоков в составных цилиндрических изделиях; в составных цилиндрических элементах аппаратов, конструкций и сооружений; в цилиндрических образцах, у которых скачкообразно изменяются теплофизические параметры или граничные условия на боковой поверхности.
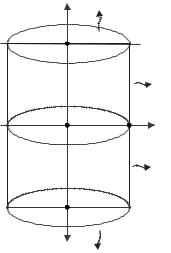
Задача теплопроводности для составного тела (рис. 6.1) может быть решена следующим образом. Решаются соответствующие задачи теплопроводности для каждого из контактирующих тел независимо друг от друга при произвольных температурах на поверхности контакта или произвольных тепловых потоках через поверхность контакта. Затем, из граничных условий 4-го рода на поверхности контакта, определяются функции, первоначально заданные как произвольные.
В данном случае для упрощения математических выражений целесообразно выбрать координаты так, как показано на рисунке. Выбранное расположение координат определяет знаки тепловых потоков в постановке задачи.
|
x |
tc3 |
|
|
|
α3 |
|
|
|
|
1 |
|
|
|
|
|
|
α1 |
tc1 |
|
0 |
R |
r |
|
|
|
|
α2 |
tc2 |
|
h |
|
|
|
y |
α4 |
tc4 |
|
|
Рис. 6.1 Составной конечный цилиндр
∂2 t (x, r) |
|
|
∂2t |
(x, r) |
|
|
1 ∂t |
|
(x, r) |
|
|
|
|
(6.1) |
|||||||||||||
1 |
|
|
+ |
|
|
1 |
|
|
|
+ |
|
|
|
|
1 |
|
|
|
=0, |
0 ≤x ≤l, 0 ≤r ≤R; |
|||||||
|
|
|
|
|
|
|
r |
|
|
|
|
||||||||||||||||
∂ x2 |
|
|
|
|
|
|
∂r2 |
|
|
|
|
|
|
∂r |
|
|
|
|
|
|
|||||||
∂2 t |
2 |
(y, r) |
+ |
∂2t |
2 |
(y, r) |
+ |
1 |
∂t |
2 |
(y, r) |
=0, 0 ≤ y ≤h; |
(6.2) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
||||||||
∂ y2 |
|
|
|
|
|
∂r2 |
|
|
|
|
|
|
∂r |
|
|
|
|||||||||||
|
|
|
λ |
|
|
∂t1(l, r) |
+α |
|
|
|
(t |
(l, r)−t |
|
)= 0; |
(6.3) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
1 |
|
|
∂ x |
|
|
|
|
|
3 |
1 |
|
|
|
|
|
c3 |
|
|
|
||||
|
|
λ |
|
∂t1(x, R)+α |
|
(t |
|
(x, R)−t |
|
)= 0; |
(6.4) |
||||||||||||||||
|
|
|
|
1 |
|
|
∂r |
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
c1 |
|
|
|||
|
|
|
|
|
|
|
|
|
∂t1 (x, 0) |
= 0; |
|
|
|
|
(6.5) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
∂r |
|
|
|
|
|
|
|
|
|||||||
|
|
λ2 |
∂t2 (h, r) |
+α4 |
(t2 (h, r)−tc4 )= 0; |
(6.6) |
|||||||||||||||||||||
|
|
|
|
∂ y |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
λ2 |
∂t2 (y, R) |
+α2 (t2 (y, R)−tc2 )= 0; |
(6.7) |
||||||||||||||||||||||
|
|
|
|
∂r |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
∂t2 (y, 0) |
= 0; |
|
|
|
(6.8) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∂r |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
t1 (0,r)= t2 (0,r). |
|
|
(6.9) |
|||||||||||||||
|
|
|
|
|
|
|
λ1 |
∂t1(0, r) |
= −λ2 |
∂t2 (0, r). |
(6.10) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
∂ x |
|
|
|
|
|
|
|
|
|
|
∂ y |
|
|||||
Будем считать произвольным тепловой поток через стыковую поверхность тел. Вследствие осевой симметрии он будет являться только функцией радиальной координаты.

Тогда стационарное температурное поле первого тела является решением задачи:
∂2 t (x, r) |
|
∂2t (x, r) |
|
|
1 ∂t |
(x, r) |
|
|
|
|
|
(6.11) |
||||||||||||
1 |
+ |
|
|
|
1 |
|
|
+ |
|
|
|
|
1 |
|
|
= 0, |
|
0 ≤x ≤l , 0 ≤r ≤R; |
||||||
|
|
|
|
|
r |
|
|
|
|
|||||||||||||||
∂ x2 |
|
|
|
|
∂r 2 |
|
|
|
|
∂r |
|
|
|
|
|
|
||||||||
|
|
λ |
|
|
|
∂t1(l, r) |
|
+α |
|
(t |
(l, r)−t |
|
)= 0; |
(6.12) |
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
1 |
|
|
∂ x |
|
|
|
|
|
3 |
|
|
1 |
|
|
c3 |
|
|
|
|
||
|
|
λ |
|
|
∂t1(x, R)+α |
|
(t (x, R)−t |
|
)= 0; |
(6.13) |
||||||||||||||
|
|
|
|
1 |
|
∂r |
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
c1 |
|
|
||
|
|
|
|
|
|
|
|
∂t1 (x, 0) |
|
= 0; |
|
|
|
|
|
(6.14) |
||||||||
|
|
|
|
|
|
|
|
|
∂r |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
λ1 |
∂t1 (0, r) |
|
= −m (r). |
|
|
|
|
(6.15) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
∂ x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Решение задачи (6.11) – (6.15) может быть получено методом конечных интегральных преобразований. Для исключения координаты r используется формула перехода к изображениям:
R |
|
|
T (x,µ)= ∫ρ(r)t1 |
(x, r)P(r,µ)dr , |
(6.16) |
0 |
|
|
где ρ(r) = r – весовая функция, являющаяся решением уравнения [4]
ddρ(rr)− ρ(rr) = 0.
Ядро интегрального преобразования P(r,µ) является решением вспомогательной задачи параметр):
d 2 P(r,µ) |
+ |
1 |
|
d P(r,µ) |
+µ2 |
P(r,µ)= 0; |
|||
|
|
|
|
||||||
d r2 |
|
|
r |
d r |
|
|
|||
λ1 |
d P(R,µ) |
+α1 P(R,µ)= 0; |
|||||||
|
d r |
|
|||||||
|
|
|
|
|
|||||
d P(0,µ) = 0.
d r
Решение задачи (6.18) – (6.20) с точностью до постоянного множителя имеет вид:
P(r,µ)= J0 (µ r ),
где µ – последовательные положительные корни уравнения
(6.17)
(здесь µ –
(6.18)
(6.19)
(6.20)
(6.21)

|
|
α1 J0 (µR)−µλ1 J1(µR)= 0. |
(6.22) |
|||
Обратный переход осуществляется по формуле: |
|
|
|
|||
|
|
∞ |
|
|
|
|
|
|
t1(x, r)= ∑ |
T (x,µn ) P(r,µn ) |
, |
(6.23) |
|
|
|
|
||||
|
|
n =1 |
Zn |
|
||
где |
|
|
|
|
|
|
R |
R |
(r,µn )dr = 0,5 R2 (J02 (µn R)+ J12 |
(µn R)). |
|
||
Zn = ∫r P2 |
(r,µn )dr =∫r J02 |
|
||||
0 |
0 |
|
|
|
|
(6.24) |
|
|
|
|
|
|
|
Здесь J0 (x), J1 (x) – Бесселевы функции первого рода, нулевого и первого порядка соответственно. Применяя преобразование (6.16) к задаче (6.11) – (6.15), переходим к изображениям:
|
|
d 2 U (x,µ) |
−µn2 U (x,µ)= 0; |
||||||
|
|
|
|
|
|
||||
|
|
|
d x2 |
|
|
|
|
||
|
λ1 |
|
d U (l,µ) |
+α3 U (l,µ)+S = 0; |
|||||
|
|
d x |
|
||||||
|
|
|
|
|
|
|
|||
|
|
|
λ1 |
d U (0,µ) |
|
= M . |
|||
|
|
|
|
||||||
|
|
|
|
|
|
d x |
|
||
Здесь |
U (x,µ)=T (x,µ)−K ; |
(6.28) |
|
|
|
|
|
||
K = α1 R tc1 J0 (µR);
λ1 µ2
S = α3 K − Rµtc3 J1 (µR) ;
R
M = −∫r m(r)J0 (µr)dr .
0
Решение задачи (6.25) – (6.27) имеет вид [3]:
U (x,µ)= Ash (µ x)+B сh (µ x),
(6.25)
(6.26)
(6.27)
(6.29)
(6.30)
(6.31)
(6.32)
где A и B определяются из граничных условий (6.26) – (6.27):
A = |
M |
; |
(6.33) |
|
λ1 µ |
||||
|
|
|
|
|
|
|
B = − |
S +M C |
, |
(6.34) |
|
|
|
|
D |
|||
|
|
|
|
|
|
|
|
здесь |
C = сh (µl)+ |
α3 |
sh (µl); |
(6.35) |
|
|
|
λ1 µ |
|
|
|
||||
|
|
|
D = α3 ch (µl)+λ1 µsh (µl). |
(6.36) |
|||
|
|
|
|
||||
Теперь можно записать решение задачи (6.11) – (6.15):
∞ |
J0 |
(r µn ) |
|
|
M n |
|
Sn +M n Cn |
|
t1 (x, r)= ∑ |
|
sh (µn x)− |
||||||
|
|
|
||||||
|
Zn |
|
λ1 µn |
Dn |
сh (µn x)+Kn . |
|||
n =1 |
|
|
|
|
||||
(6.37)
Стационарное температурное поле второго тела является решением задачи, аналогичной задаче (6.11) – (6.15):
∂2 t |
2 |
(y, r) |
+ |
∂2t |
2 |
(y, r) |
+ |
|
1 ∂t |
2 |
(y, r) |
= 0, 0 |
≤ y ≤h, 0 |
≤r ≤R; |
(6.38) |
||||
|
|
|
|
|
|
r |
|
|
|
||||||||||
∂ y2 |
|
∂r 2 |
|
|
|
|
∂r |
|
|
|
|
||||||||
|
|
|
|
λ2 |
∂t2 |
(h, r) |
+α |
4 (t2 (h, r)−tc4 )= 0; |
|
(6.39) |
|||||||||
|
|
|
|
|
∂ y |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
λ2 |
∂t2 |
(y, R) |
+α2 (t2 (y, R)−tc2 )= 0; |
|
(6.40) |
||||||||||
|
|
|
|
|
∂r |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
∂t2 (y, 0) |
= 0; |
|
|
|
(6.41) |
|||||||
|
|
|
|
|
|
|
|
|
|
∂r |
|
|
|
|
|
||||
|
|
|
|
|
|
λ |
∂t2 (0, r) |
= −m (r). |
|
|
(6.42) |
||||||||
|
|
|
|
|
|
2 |
|
∂ y |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Решение этой задачи может быть записано формально путем соответствующей замены величин, входящих в решение задачи (6.11) – (6.15):
y →x, λ2 →λ1, α2 →α1, α4 →α3 , tc2 →tc1 , |
(6.43) |
|
tc 4 →tc 3 , |
γn →µn , M1n → M n , K1n → Kn , |
|
S1n → Sn , |
C1n → Cn , D1n → Dn , Z1n →Zn . |
|
Теперь числа М1 и М могут быть найдены из условия равенства температур (6.9) и неразрывности тепловых потоков (6.10) на поверхности контакта тел:
∞∑
n =1∞∑n =1
J0 (r µn ) |
|
|
|
Sn +Mn Cn |
|
|
|
|
|
∞ |
J0 (r γn ) |
|
|
|
S |
+M |
1n |
C |
|
|||
|
|
− |
|
|
|
|
= |
∑ |
|
|
− |
1n |
|
1n |
|
|||||||
|
|
|
|
|
Z |
|
D |
|
|
|||||||||||||
Z |
n |
|
D |
|
|
+Kn |
|
|
|
|
+K1n ; |
|||||||||||
|
|
|
n |
|
|
|
|
|
|
n =1 |
1n |
|
|
|
1n |
|
|
|||||
J0 (r µn ) |
|
|
∞ |
J0 (r γn ) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
M =−∑ |
|
|
|
|
M1n . |
|
|
|
|
|
|
|
|
|
|
||||
Z |
n |
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
n =1 |
1n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(6.44)
Будем последовательно умножать левые и правые части равенства на r J0 (r µk ) и интегрировать в пределах от 0 до R. В результате получаем систему уравнений:
|
1 |
|
|
|
+M k Ck |
|
|
R |
|
|
|
|
|
|
|
|
||||||
|
|
− |
Sk |
+K |
|
|
∫ |
r J 2 (r µ |
|
)d r = |
|
|||||||||||
Z |
|
|
|
|
|
|
|
|||||||||||||||
|
k |
|
|
|
D |
k |
|
|
k |
|
|
|
0 |
k |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|||
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
||||
|
|
|
|
|
|
|
S1n +M1n C1n |
|
|
|
||||||||||||
|
|
=∑ |
1 |
− |
|
+K1n |
|
|
∫r J0 (r µk )J0 (r γn )d r ; |
(6.45) |
||||||||||||
|
Z |
|
|
|
D |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
n =1 |
|
1n |
|
|
1n |
|
|
|
|
|
|
|
|
0 |
|
|||
|
|
|
|
R |
|
|
|
|
|
∞ |
1 |
|
|
|
R |
|
|
|
|
|||
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
k |
|
∫r J02 (r µk )d r = ∑ |
|
|
|
|
|
∫r J0 (r µk )J0 (r γn )d r . |
|
||||||||||||
Z |
|
Z |
1n |
|
|
|
|
|||||||||||||||
|
|
k |
0 |
|
|
|
|
|
|
n =1 |
|
|
|
0 |
|
|
|
|
||||
Здесь использовано свойство ортогональности Бесселевых |
|
|
|
|
|
|
функций: |
|
||||||||||||||
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
∫r J0 (µn r)J0 (µk r)d r = 0, |
если n ≠k . |
(6.46) |
||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если в расчетах используется N членов ряда, система (6.45) представляет собой систему линейных уравнений, из которой определяются числа M1k , M k ; 1 ≤k ≤N .
Вводя соответствующие обозначения, получим систему (6.45) в виде:
|
N |
|
Gk M k −∑Hnk G1n M1n = Lk , 1≤k ≤N ; |
|
|
|
n =1 |
(6.47) |
|
N |
|
M k −∑Hnk M n = 0, |
|
|
|
n =1 |
|
где G |
k |
= |
Ck |
; |
G |
= |
C1k |
; |
(6.48) |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
Dk |
|
1k |
|
D1k |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Hnk = |
R µn J1 (µn R)J0 (γk R)−γk J0 (µn R)J1 |
(γk R) |
; |
(6.49) |
||||||
|
|
|
|
|
|
|
|
|
Zn |
|
|
|
µn2 −γk2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Sk |
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1k |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Lk = − |
|
+Kk +∑Hnk |
|
−K1k . |
|
|
(6.50) |
|||
|
|
|
|
|
|
|
|
|
D |
D |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
k |
n =1 |
1k |
|
|
|
|
|
Подставляя из второго уравнения системы (6.47) Мk в первое, получаем систему N линейных уравнений относительно неизвестных М1n:
N |
|
∑Hnk (Gk +G1n )M1n = −Lk , 1≤k ≤N. |
(6.51) |
n =1
Затем определяются числа Мk:
N |
|
M k = ∑Hnk M n , 1≤k ≤N. |
(6.52) |
n =1
7 ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ТЕПЛОПРОВОДНОСТИ В ЭЛЕМЕНТАХ ОБОРУДОВАНИЯ, ИМЕЮЩИХ ФОРМУ СТЕРЖНЕЙ И ПЛАСТИН
Рассмотрим случай, когда постоянный тепловой поток подводится к торцу стержня или двум соседним торцам пластины, а поверхность стержня или плоские поверхности пластины омываются теплоносителем при свободной или вынужденной конвекции.
При выводе уравнения используются следующие допущения:
•температура теплоносителя по длине стержня или поверхности пластины не меняется;
•источники тепла в стержне или пластине отсутствуют;