

27. Управление координатами в асинхронном электроприводе с короткозамкнутым ротором.
Изменением напряжения.
Напряжение на фазах статора можно изменять с помощью тиристорного или симисторного преобразователя напряжения или посредством переключения обмоток со схемы звезда на схему треугольник. При изменении напряжения на обмотках статора изменяется критический момент двигателя пропорционально квадрату напряжения.
![]()
При переключении со звезды на треугольник момент вырастает в три раза.
Преимущества: простота и дешевизна реализации; экономия энергии за счет снижения напряжения при уменьшении момента сопротивления; возможность плавного пуска двигателя при увеличении напряжения. Для плавного пуска применяются так называемые софт-стартеры на тиристорах и симисторах.
Н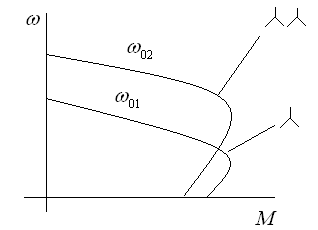 едостатки:
малый диапазон регулирования скорости,
поэтому целесообразно применять данный
метод для стабилизации скорости при
изменении нагрузки. Большие потери в
процессе регулирования. Невысокая
точность, т.к. снижается жесткость ()
механической характеристики.
едостатки:
малый диапазон регулирования скорости,
поэтому целесообразно применять данный
метод для стабилизации скорости при
изменении нагрузки. Большие потери в
процессе регулирования. Невысокая
точность, т.к. снижается жесткость ()
механической характеристики.
Изменением скорости холостого хода.
![]()
А) Изменением частоты, подводимой к двигателю с помощью преобразователя частоты на тиристорах или транзисторах.
В) Переключением числа пар полюсов в многоскоростных двигателях.
В промышленности выпускаются 2, 3, 4-х скоростные двигатели с дополнительным числом пар полюсов.
Наиболее часто применяется со схемой звезда на 2-ю звезду.
При переключении со схемы звезда на 2-ю звезду скорость х/х увеличивается в 2 раза, а критический момент не изменяется.
Преимущества: простота реализации.
Недостаток: ступенчатость регулирования, невысокая надежность релейно-контакторных схем.
Основной способ регулирования скорости АД является изменением частоты тока статора с одновременным изменением напряжения с помощью частотного преобразователя. При этом для сохранения постоянного критического момента и ограничения тока двигателя выдерживается постоянным отношением
![]()
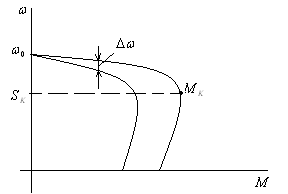
![]()
П реимущества:
большой диапазон, т.к. частота от 1 до
400 Гц; высокая точность регулирования,
т.к.
реимущества:
большой диапазон, т.к. частота от 1 до
400 Гц; высокая точность регулирования,
т.к.![]() =const
(наклон один и тот же); малые потери
энергии, высокий КПД, т.к. скольжение
при постоянном моменте сопротивления
не увеличивается.
=const
(наклон один и тот же); малые потери
энергии, высокий КПД, т.к. скольжение
при постоянном моменте сопротивления
не увеличивается.
Недостаток: сложность и большая стоимость преобразователя частоты.
При вентиляторном моменте сопротивления пропорционально квадрату скорости, который имеет место в центробежных насосах, для экономии энергии используются квадратичные законы регулирования напряжения.
Для повышения точности регулирования скорости двигателя применяется векторное управление, при котором изменяются амплитуда, частота и фаза тока в каждой обмотке статора. Оптимальное положение вектора обмотки статора относительно его ротора.
28. Элементная база информационного канала. Цифровые интегральные микросхемы.
До 50-х гг. в разомкнутых системах ЭП примен. В основном, реле и контакторы, а замкнутых – электромашинные усилители.
В 60-х появились дискретные системы управления на диодах и транзисторах. В регулир. ЭП внедрялись машинные усилители.
В 70-х в разомкнутых системах начали применяться интегральные логич. микросхемы для формирования управляющих сигналов. В замкнутых – тиристорные и транзисторные преобразователи.
С 80-х – разомкнутые и замкнутые системы с МП – управлением и гибкой логикой функционирования. Такое изменение в элементной базе информационного канала привело к увеличению качества и точности управления, повышению КПД и надежности, снижению массы и стоимости оборудования. В соврем. оборудовании находят применение все элементы информационного канала.
2. Аналоговые регуляторы на операционных усилителях.
3.Цифровые интегральные микросхемы.
Цифровыми наз. микросхемы, кот. работают с информацией в двоичной форме
«0»=>Uо=0..0,5В
«1»=>U1=2,4..5В
По степени интеграции различают :
1)Малые ИС n<100 (логические элементы, триггеры)
2)средние ИС n<1000 (функциональные узлы)
3)БиС n=1000 – 10000 (ОЗУ, ПЗУ , УВВ)
4)СБиС n>104 (микропроцессоры)
А)Характеристики ИМС
-Быстродействие – время задержки пропускания сигнала:
t![]() (НС),
tвкл,
tвыкл
(НС),
tвкл,
tвыкл
-потребляемая мощность, мВт
-надежность, помехозащищенность
Основные характеристики зависят от вида технологии изготовления микросхемы.
Технология изготовления ТТЛ обеспечивает среднее быстродействие и среднее потребление мощности (ТТЛ К155)
ТТЛЩ – ТТЛ с диодами Щоттки – уменьшение потребления мощности.
КМОП – комплиментарные металл-окисл. проводник на полевых транзисторах. Обеспечивает минимальное потребление энергии, выс. помехозащищенность при небольшом быстродействии.
NМОП на полевых транзисторах n-типа обеспеч. наиболее выс. быстродействие.
Б) Логические ИМС
В
1
0
0
0
0
0
1
1
1
1
1
1
1 & &
1
1
1 0
1
НЕ
ИЛИ
И
И-НЕ
ИЛИ-НЕ


















0
0
0
ЛН ЛЛ ЛИ ЛА ЛП- прочие, ЛК – комбинированные
В) триггеры на ИМС
RS-триггеры Т – триггеры Д - триггеры

Д – триггер задерживает сигнал на входе Д до прихода синхроимпульса на вход С.
JK – триггер
Может выполнять функции любого триггера в зав-ти то комбинации сигнала на входе J,K
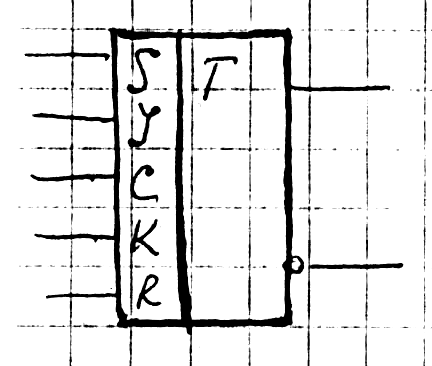
если J=K=0 => RS -триггер
k
Г) функциональные узлы на ИМС.
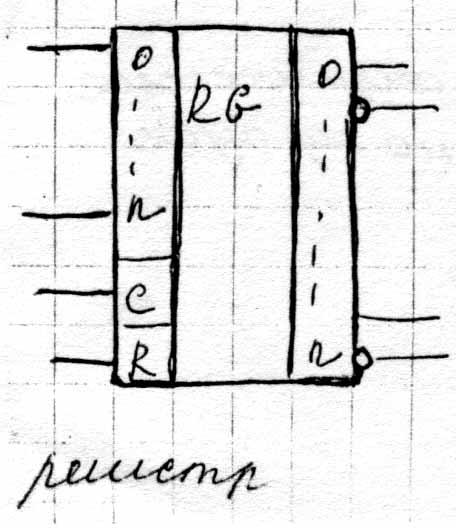
-Регистры – предназначены для хранения двоичного кода числа, постр. на RS – триггерах или на D – триггерах (сдвигающий)
(RB-/UP)
Сдвигающий рег.: RG
-Дешифраторы (ДС/ИГ) – преобраз. двоич. код в управляющ. сигнал
число
выходов дешифратора N=2![]()
n – число входов
-счетчики (СТЧ/ИЕ)
-мультиплексоры (MS/КП) – для коммутации разных входов на 1 выход.
Цифровые интегральные микросхемы
Работают в двоичной форме
«0» - U=0-0,5B
«1» - U=2,4-5B
29.
Синтез дискретных управляющих автоматов.
Дискретные автоматы используют для управления Электрооборудованием в промышленности
Они могут быть построены на релейно-контакторных схемах, логических интегральных микросхемах на жесткой логике, а также на микропроцессорных системах с гибкой логикой.
Синтез ДА включает в себя следующие этапы:
постановка задачи
- определение интерфейса с объектом управления, определение числа выходных сигналов, их типа и уровня
- определение интерфейса с оператором и АСУ ТП
-словесное описание алгоритма функционирования
2) разработка математической модели
-схема алгоритма функционирования
-граф автомата
-сетевые модели для описания параллельных процессов
на основании математической модели производится оптимизация структурных схем автомата, уменьшается число элементов.
3)разработка структурной схемы ДА
В общем случае структурная схема включает в себя входной логический преобразователь ЛП1 , блок памяти П и выходной логический преобразователь ЛП2
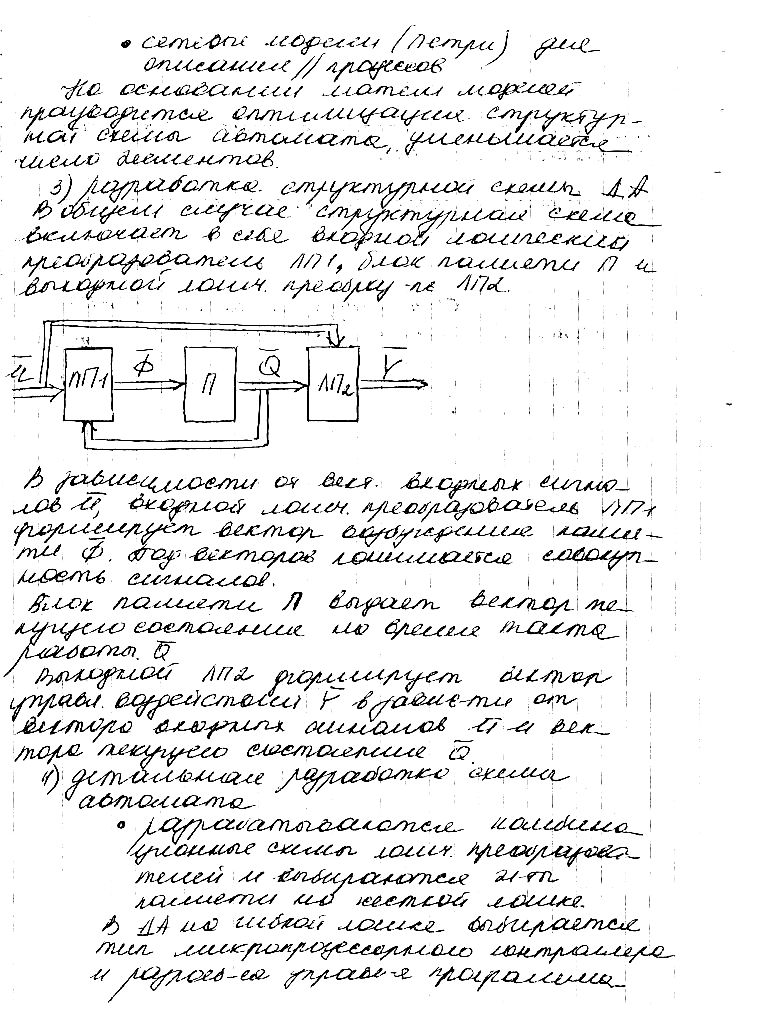
В зависимости от вектора входных сигналов , выходной логический преобразователь формирует вектор возбуждения памяти. Под вектором понимается совокупность сигналов
Блок памяти выдаёт выходной вектор. ЛП2 формирует вектор управления воздействием в зависимости от вектора входных сигналов и вектора текущего состояния
4)детальная разработка схемы автомата
- разрабатываются комбинационные схемы логических преобразователей и выбирается элементы памяти на Жесткой логике.
В ДА на гибкой логике выбирается тип микропроцессорного контроллера и разрабатывается управляющая программа.
5) детальная разработка принципиальной схемы
-цепи подключения датчиков и органов управления к контроллеру
-цепи подключения элементов автоматики и входных цепей контроллера
-блок питания и защита контроллера и электроавтоматики