

Doicu A., Wriedt T., Eremin Y.A. Light scattering by systems of particles (OS 124, Springer, 2006
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.5 |
Transition Matrix |
79 |
|||||||||
| |
S |
(θ) 2 |
, |
S |
ϕβ |
(θ) 2 |
|
, |
| |
S |
ϕα |
(θ) |
2 |
|
, |
S |
|
(θ)S |
|
|
(θ) |
|
and |
|
S |
θα |
(θ)S |
(θ) , and |
||||||||||||||
|
θα |
|
| |
| |
|
|
| |
|
|
|
|
| |
|
|
θβ |
ϕα |
|
|
|
|
|
|
ϕβ |
|
|
|
||||||||||||||||
compute the eight nonzero elements by using the relations |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
' |
|
|
|
|
2 |
( ' |
|
|
|
|
|
2 |
( ' |
|
|
|
|
|
|
2 |
( ' |
|
2 |
( |
|||||||||
|
F11(θ) |
= |
|
|
|
|
|Sθβ (θ)| |
|
|
|
+ |Sθα(θ)| |
|
+ |Sϕβ (θ)| |
|
|
|
+ |Sϕα(θ)| |
|
, |
|||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
' |
|
|
|
|
2 |
( ' |
|
|
|
|
|
2 |
( ' |
|
|
|
|
|
|
2 |
( ' |
|
2 |
( |
|||||||||
|
F12(θ) |
= |
|
|
|
|
|Sθβ (θ)| |
|
|
|
− |Sθα(θ)| |
|
+ |Sϕβ (θ)| |
|
|
|
− |Sϕα(θ)| |
|
, |
|||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
F21(θ) = F12(θ) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
1 |
|
' |
|
|
|
|
2 |
( ' |
|
|
|
|
|
2 |
( ' |
|
|
|
|
|
|
2 |
( ' |
|
2 |
( |
|||||||||
|
F22(θ) |
= |
|
|
|
|
|Sθβ (θ)| |
|
|
|
− |Sθα(θ)| |
|
− |Sϕβ (θ)| |
|
|
|
+ |Sϕα(θ)| |
|
, |
|||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
F33 |
(θ) |
|
= Re )Sθβ (θ)S |
|
|
(θ)* |
+ )Sθα(θ)S |
(θ)* , |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕα |
|
|
|
|
|
|
|
|
ϕβ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
F34 |
(θ) |
|
= Im )Sθβ (θ)S |
|
(θ)* |
+ )Sθα(θ)S |
|
(θ)* |
, |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕα |
|
|
|
|
|
|
|
|
ϕβ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
F43(θ) = − F34(θ) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
F44 |
(θ) |
|
= Re )Sθβ (θ)S |
|
(θ)* |
− |
)Sθα(θ)S |
|
|
|
(θ)* . |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕα |
|
|
|
|
|
|
ϕβ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
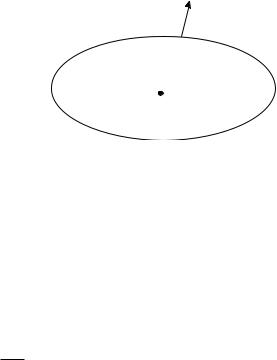
Other scattering characteristics as for instance the orientation-averaged scattering cross-section and the orientation-averaged mean direction of propagation of the scattered field can be expressed in terms of the elements of the orientation-averaged scattering matrix. To derive these expressions we consider the scattering plane characterized by the azimuth angle ϕ as shown in Fig. 1.15. In the scattering plane, the Stokes vector of the scattered wave is given by Is(rer ) = (1/r2) F (θ) Ie, whence, using the transformation rule of the Stokes vector under coordinate rotation Ie = L(ϕ)Ie, we obtain
1
Is (rer ) = r2 F (θ) L (ϕ) Ie .
Further, taking into account the expression of the Stokes rotation matrix L (cf. (1.23)) we derive
Is (er ) = F11 (θ) Ie + [ F12(θ) cos 2ϕ + F13(θ) sin 2ϕ] Qe
− [ F12(θ) sin 2ϕ − F13(θ) cos 2ϕ] Ue + F14(θ) Ve .
Integrating over ϕ, we find that the orientation-averaged scattering crosssection and the orientation-averaged mean direction of propagation of the scattered field are given by
Cscat = |
1 |
Ω Is (er ) dΩ (er ) |
|||
Ie |
|
||||
= |
2π π |
[ F11(θ) Ie + F14(θ) Ve] sin θ dθ |
|||
Ie |
|
0 |
|||

80 1 Basic Theory of Electromagnetic Scattering
|
Z |
|
|
|
|
er |
|
|
|
|
eϕ |
|
|
θ |
|
|
ek |
eθ |
|
|
O |
e’α |
Y |
|
eα |
||
|
|
|
|
eβ |
ϕ |
e’ |
|
X |
|
β |
|
|
|
|
Fig. 1.15. Incident and scattering directions ek and er . The incident direction is along the Z-axis and the scattering matrix relates the Stokes vectors of the incident and scattered fields specified relative to the scattering plane characterized by the azimuth angle ϕ
and
g = |
1 |
|
|
|
|
Ω Is (er ) er dΩ (er ) |
|
||
Cscat Ie |
|
|||
= |
2π |
! π |
[ F11(θ) Ie + F14(θ) Ve] sin θ cos θ dθ |
" |
|
|
ez , |
||
Cscat Ie |
0 |
|||
respectively. Because the incident wave propagates along the Z-axis, the nonzero component of g is the orientation-averaged asymmetry parametercos Θ . In practical computer simulations, we use the decomposition
1
Cscat = Ie ( Cscat I Ie + Cscat V Ve) ,
and compute the quantities Cscat I and Cscat V by using (1.124) and the
relation
π
Cscat V = 2π F14(θ) sin θ dθ , (1.133)
0
respectively. These quantities do not depend on the polarization state of the incident wave and can be used to compute the orientation-averaged scattering cross-section for any incident polarization. For the asymmetry parameter we proceed analogously; we use the decomposition

|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.5 Transition Matrix |
81 |
|||
|
cos Θ |
|
= |
Cscat I |
|
1 |
( cos Θ |
I |
I |
|
+ cos Θ |
V |
V |
) , |
|
|||
|
|
|
|
|
||||||||||||||
|
|
Cscat Ie |
|
|
|
e |
|
e |
|
|
||||||||
and compute cos Θ I and cos Θ V by using the relations |
|
|
||||||||||||||||
|
cos Θ I = |
2π |
π |
F11(θ) sin θ cos θ dθ |
(1.134) |
|||||||||||||
and |
Cscat I |
0 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos Θ V = |
2π |
π |
F14(θ) sin θ cos θ dθ , |
(1.135) |
|||||||||||||
|
Cscat I |
0 |
||||||||||||||||
respectively. For macroscopically isotropic and mirror-symmetric media, |
||||||||||||||||||
|
|
|
|
|
F14(θ) = 0 |
|
|
|
|
|
|
|||||||
and consequently, Cscat = Cscat I and cos Θ = cos Θ I. |
|
|
||||||||||||||||
Another important scattering characteristic is the angular distribution of the scattered field. For an ensemble of randomly oriented particles illuminated by a vector plane wave of unit amplitude and polarization vector epol = epol,β eβ + epol,αeα, the di erential scattering cross-sections in the scattering
plane ϕ are given by |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
σ |
dp |
(θ) = |
' |
E |
s∞,θ |
(θ) |
| |
2( |
= ' |
S |
|
(θ) |
2( &E |
&2 |
|
|||||||||||||
|
|
|
|
|
| |
|
|
|
|
| θβ |
|
| |
|
|
& |
e0,β & |
|
||||||||||||
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
( |
|
&2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
+ |
| |
S |
θα |
(θ) |
|
2 &E |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
& e0,α& |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
+2Re |
Sθβ (θ)S |
(θ) |
|
E |
|
|
|
E |
|
|
(1.136) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θα |
|
|
e0,β |
e0,α |
|
|
||||||
and |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σ |
ds |
(θ) |
|
= |
' |
| |
E |
s∞,ϕ |
(θ) |
| |
2( |
= ' |
S |
|
(θ) |
| |
2( &E |
&2 |
|
|||||||||
|
|
|
|
|
|
|
|
| ϕβ |
|
|
|
|
& |
e0,β & |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
( |
|
&2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
| |
S |
ϕα |
(θ) |
| |
2 &E |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& e0,α& |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
+2Re )Sϕβ (θ)Sϕα(θ)* Ee0 |
,β Ee0,α , |
(1.137) |
||||||||||||||||||||
where |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ee0,β = epol,β cos ϕ + epol,α sin ϕ , |
|
|
|
||||||||||||||||||||||
|
|
|
|
E |
|
|
= |
|
|
|
e |
|
sin ϕ + e |
|
|
cos ϕ . |
|
|
|
||||||||||
|
|
|
|
|
e0,α |
|
|
− pol,β |
|
|
|
pol,α |
|
|
|
|
|
|
|
|
|||||||||
It should be noted that for macroscopically isotropic and mirror-symmetric media,
Sθβ (θ)Sθα(θ) = 0 , )Sϕβ (θ)Sϕα(θ)* = 0 ,
and the expressions of σdp(θ) and σds(θ) simplify considerably.
82 1 Basic Theory of Electromagnetic Scattering
In practice, the inequalities
F11 ≥ |Fij | , i, j = 1, 2, 3, 4 ,
( F11 + F22 )2 − 4 F12 2 ≥ ( F33 + F44 )2 + 4 F34 2 ,
F11 − F22 ≥ |F33 − F44| ,
F11 − F12 ≥ |F22 − F12| ,
F11 + F12 ≥ |F22 + F12| , |
(1.138) |
can be used to test the numerically obtained orientation-averaged scattering matrix [104, 169].
It should be emphasized that we do not expand the elements of the orientation-averaged scattering matrix in generalized spherical functions (or Wigner d-functions) and do not exploit the advantage of performing as much work analytically as possible. Therefore, the above averaging procedure is computationally not so fast as the scattering matrix expansion method given by Mishchenko [162]. As noted by Mishchenko et al. [169], the analyticity of the T -matrix formulation can be connected with the formalism of expanding scattering matrices in generalized spherical functions to derive an e cient procedure that does not involve any angular variable.
Khlebtsov [120] and Fucile et al. [71] developed a similar formalism that exploit the rotation property of the transition matrix but avoids the expansion of the scattering matrix in generalized spherical functions. Paramonov [182] and Borghese et al. [23] extended the analytical orientation-averaging procedure to arbitrary orientation distribution functions, while the standard averaging approach employing numerical integrations over the orientation angles has been used by Wiscombe and Mugnai [263, 264] and Barber and Hill [8]. A method to compute light scattering by arbitrarily oriented rotationally symmetric particles has been given by Skaropoulos and Russchenberg [212].

2
Null-Field Method
The standard scheme for computing the transition matrix relies on the nullfield method. The null-field method has been introduced by Waterman [253] as a technique for computing electromagnetic scattering by perfectly conducting particles. Later, Bates [10] studied the same problem, followed by Waterman’s applications of his method to electromagnetic scattering from dielectric particles [254, 256] and to acoustic scattering [255]. The null-field method has subsequently been extended to multiple scattering problems [187, 188] and to electromagnetic scattering by multilayered and composite particles [189, 190]. Peterson and Str¨om [189] derived a recurrence relation for the transition matrix of a multilayered particle and analyzed particles which contains several enclosures, each with arbitrary but constant electromagnetic properties. The null-field treatment of a composite particle with two constituents uses a particular projection of the boundary conditions on the interface and treats the two constituents as separate particles by exploiting the translation addition theorem for vector spherical wave functions. However, for a large class of composite particles it is not natural to treat the two parts as separate particles. The geometric constraints which appear in the two-particles formalism (originating in the use of translations of radiating vector spherical wave functions) are eliminated, partially or completely by Str¨om and Zheng [219]. The case of a composite particle consisting of three or more constituents has been analyzed by Zheng [276], while the extension of the method to composite particles with concavo-convex constituents has been discussed by Zheng and Str¨om [279]. Applications of the null-field method to electromagnetic, acoustic and elastodynamic scattering by single and aggregated particles, to multiple scattering in random media, and to scattering by periodical and infinite surfaces can be found in [168, 169, 228, 234, 235].
Essentially, the null-field method involves the following steps:
1.Derivation of an infinite system of integral equations for the surface fields by using the general null-field equation.
842 Null-Field Method
2.Derivation of integral representations for the scattered field coe cients in terms of surface fields by using the Huygens principle.
3.Approximation of the surface fields by a complete and linearly independent system of (tangential) vector functions.
4.Truncation of the infinite system of null-field equations and of the scatteredfield expansion.
5.Computation of the truncated transition matrix by matrix inversion.
These steps explicitly avoid invoking the Rayleigh hypothesis [11, 34] and relies on the approximation of the surface fields by a complete system of vector functions (the localized vector spherical wave functions). The completeness and linear independence of various systems of vector functions on closed surfaces, including the vector spherical wave functions, have been established by Doicu et al. [49]. For scattering problems involving inhomogeneous particles it is necessary to establish the completeness and linear independence of this system of vector functions on two enclosing surfaces and this result is given in Appendix D.
Several studies have addressed the convergence of the null-field method. Ramm [200, 201] and Kristensson et al. [126] have derived su ciency criteria for the convergence of the null-field method, but this criteria are not satisfied for nonspherical surfaces. A major progress has been achieved by Dallas [44], who showed that for ellipsoidal surfaces, the far-field pattern converges in the least-squares sense on the unit sphere.
In this chapter, we present applications of the null-field method to electromagnetic scattering by homogeneous, isotropic, anisotropic and chiral particles, inhomogeneous, layered and composite particles and clusters of particles. Our presentation closely follows the analysis developed by Str¨om and his coworkers. In order to preserve the generality we assume that the particles and the infinite, exterior medium are magnetic, but in practice we always deal with nonmagnetic media (µs = µi = 1). In the last two sections, we treat multiple scattering in random media and scattering by a particle on or near a plane surface.
2.1 Homogeneous and Isotropic Particles
Most practical implementations of the null-field method pertain to homogenous and isotropic particles. T -matrix codes for axisymmetric particles have been developed by Wiscombe and Mugnai [263], Barber and Hill [8] and Mishchenko and Travis [167]. Light scattering calculations for nonaxisymmetric particles have been reported by Barber [7], Schneider and Peden [207], Laitinen and Lumme [127], Wriedt and Comberg [269], Baran et al. [6], Havemann and Baran [98], Kahnert et al. [111, 112], and Wriedt [268]. In this section, we provide a detailed description of the null-field method in application to homogenous and isotropic particles.
2.1 Homogeneous and Isotropic Particles |
85 |
||
εs, |
µs |
n |
|
|
|
||
|
|
Ds |
|
ε i, |
µ i |
S |
|
|
|
D i |
|
O
Fig. 2.1. Geometry of a homogeneous particle
2.1.1 General Formulation
The transmission boundary-value problem for homogeneous and isotropic particles has been formulated in Sect. 1.4 but we mention it in order for our analysis to be complete. We consider an homogeneous, isotropic particle occupying a domain Di with boundary S and exterior Ds (Fig. 2.1). The unit normal vector to S directed into Ds is denoted by n. The exterior domain Ds is assumed to be homogeneous, isotropic, and nonabsorbing, and if εt and µt are the relative permittivity and permeability of the domain Dt, where t = s, i, we have εs > 0 and µs > 0. The wave number in the domain Dt is kt = k0√εtµt, where k0 is the wave number in the free space. The transmission boundary-value problem for a homogeneous and isotropic particle has the following formulation.
Given Ee, He as an entire solution to the Maxwell equations representing the external excitation, find the vector fields Es, Hs and Ei, Hi satisfying the Maxwell equations
|
|
× Et = jk0µtHt , |
× Ht = −jk0εtEt , |
(2.1) |
||||||
in Dt, t = s, i, the two transmission conditions |
|
|||||||||
|
|
|
|
n × Ei − n × Es = n × Ee , |
|
|||||
|
|
|
|
n × Hi − n × Hs = n × He , |
(2.2) |
|||||
on S, and the Silver–M¨uller radiation condition |
|
|||||||||
r |
|
|
|
|
|
|
1 |
|
|
|
|
|
× √ |
µs |
Hs + √ sEs |
= O |
|
, as r → ∞ , |
(2.3) |
||
|
r |
r |
||||||||
uniformly for all directions r/r.
The standard scheme for computing the transition matrix in the framework of the null-field method relies on the solution of the general null-field equation

86 2 Null-Field Method
Ee(r) + × ei (r ) g (ks, r, r ) dS(r )
S
|
j |
|
|
|
+ |
|
|
× × |
hi (r ) g (ks, r, r ) dS(r ) = 0 , r Di (2.4) |
k ε |
|
|||
0 |
s |
S |
||
for the surface fields ei = n × Ei and hi = n × Hi, and the calculation of the scattered field from Huygens principle
Es(r) = × ei (r ) g (ks, r, r ) dS(r )
S
|
j |
|
|
|
+ |
|
|
× × |
hi (r ) g (ks, r, r ) dS(r ) , r Ds . (2.5) |
k ε |
|
|||
0 |
s |
S |
||
Considering the general null-field equation (2.4), we restrict r to lie on a spherical surface enclosed in Di, expand the incident field and the dyad gI in terms of regular vector spherical wave functions (cf. (1.25), (B.21) and (B.22)), and use the orthogonality of the vector spherical wave functions on spherical surfaces to obtain
jks2
πS
+ j
|
$ N |
3 |
|
(ksr ) % |
|
|
ν |
(2.6) |
|||||
ei (r ) · |
M |
3 |
(ksr ) |
|||
ν |
|
|||||
$%
µs |
h (r ) |
|
M |
3 |
|
(ksr ) |
dS (r ) = |
aν , ν = 1, 2, . . . |
|
|
ν |
||||||||
|
|
|
|
|
|
|
|||
εs i |
· |
N |
3 |
(ksr ) |
|
− bν |
|||
ν |
|
||||||||
For notation simplification we introduced the multi-indices ν = (m, n) and ν = (−m, n), and used the convention ν = 1, 2, . . . , when n = 1, 2, . . . , and m = −n, . . . , n. The above set of integral equations will be referred to as the null-field equations.
An approximate solution to the null-field equations can be obtained by approximating the surface fields ei and hi by the complete set of regular vector spherical wave functions for the interior domain (or the interior wave equation)
$
eNi (r ) hNi (r )
% N |
N |
|
|
n (r ) × M µ1 (kir ) |
|
|
||||||||
= cµ |
|
|
|
|
|
|
|
|
|
|
||||
− |
j |
εi n (r ) |
× |
N |
1 (k r ) |
|
||||||||
µ=1 |
|
|
|
|
µi |
|
|
µ |
i |
|
|
|||
N |
|
n (r ) × N µ1 (kir ) |
|
|
|
|||||||||
+dµ |
|
j |
|
|
n (r ) |
|
M 1 |
(k |
r ) , |
(2.7) |
||||
|
εi |
× |
||||||||||||
|
− |
|
|
µi |
|
|
|
µ |
i |
|
|
|
||
where N is a truncation multi-index and µ = 1, 2, . . . , N , when n = 1, 2, . . .
Nrank, and m = −n, . . . , n. In all applications of the null-field method we approximate the surface fields by finite expansions, and the coe cients cNµ and
dNµ on the right-hand side of the above equation then depend on the number of

2.1 Homogeneous and Isotropic Particles |
87 |
terms in the expansion. The completeness of the system {n × M 1µ, n × N 1µ}µ implies the existence of the set of expansion coe cients {cNµ , dNµ }Nµ=1 and of
the integer N = N (ε), such that ei − eNi 2,S < ε, for any ε > 0. In (2.7), eNi and hNi are expressed in terms of the same set of expansion coe cients and this choice shows that ei and hi are not independent unknowns. In fact, the surface fields ei and hi solve the general null-field equations in Di and Ds as given by (2.4) and
× ei (r ) g (ki, r, r ) dS(r )
S
|
j |
|
|
+ |
|
× × |
S hi (r ) g (ki, r, r ) dS(r ) = 0 , r Ds , (2.8) |
k0εi |
respectively, or equivalently, the infinite systems of null-field equations as given by (2.7) and
|
|
$ N |
1 |
|
(kir ) % |
|
ei (r ) · |
ν |
|||||
S |
M |
1 |
(kir ) |
|||
ν |
||||||
$%
|
|
|
|
|
M |
1 |
|
(kir ) |
|
|
|
µi |
|
|
|
||||||
|
|
|
ν |
|
||||||
+ j |
|
|
hi (r ) · |
|
1 |
(kir ) |
dS (r ) = 0 , ν = 1, 2, ... , (2.9) |
|||
|
εi |
N |
||||||||
|
|
ν |
|
|||||||
respectively. Note that (2.8) is the Stratton–Chu representation theorem for the internal field in Ds, while (2.9) follows from the spherical wave expansion of the dyad gI outside a sphere enclosing Di. When ei and hi are treated as independent unknowns and are approximated by sub-boundary bases, the expansion coe cients are obtained by solving (2.6) and (2.9). In (2.7), the expansion of hNi has a physical meaning: the surface fields ei and hi are the tangential components of the electric and magnetic fields Ei and Hi, respectively. Taking into account the orthogonality relation (cf. (B.25))
|
1 |
|
$ M |
1 |
% |
|
1 |
|
$ N |
1 |
% |
|
|||
· |
ν |
+ n × N |
· |
ν |
dS = 0 , |
||||||||||
n × M |
µ |
N |
1 |
|
µ |
M |
1 |
|
|||||||
S |
|
|
|
ν |
|
|
|
|
|
ν |
|
||||
we see that eNi and hNi as given by (2.7) solve the null-field equations in Ds and therefore, the expansion coe cients cNµ and dNµ have to be determined from the null-field equations in Di.
Inserting (2.7) into the first 2N null-field equations, yields
|
Q31 (ks, ki) i = −e, , |
(2.10) |
|||
where i = [cN , dN ]T |
and e = [a , b |
ν |
]T |
are vectors containing the expan- |
|
µ µ |
ν |
|
|
|
|
sion coe cients of the surface and incident fields, respectively. In general,

88 2 Null-Field Method
for nonmagnetic media with k1 = k0√ε1 and k2 = k0√ε2, the Qpq (k1, k2) matrix,
(Qpq )11 (Qpq )12
Qpq (k1, k2) = νµ νµ , (Qpq )21νµ (Qpq )22νµ
is defined as
(Qpq )11νµ =
(Qpq )12νµ =
(Qpq )21νµ =
and
(Qpq )22νµ =
|
jk12 ! |
|
q |
|
|
|
|
|
|
|
p |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
n (r ) × M |
µ (k2r ) · N |
|
|
(k1r ) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
π |
|
S |
ν |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
" |
|||
|
|
ε2 |
|
q |
|
|
|
p |
|
|||||||||||||||||
+ |
|
|
|
|
|
|
|
|
|
|
n (r ) × N µ |
(k2r ) |
· M |
|
|
|
|
|
|
|
(k1r ) dS (r ) , |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
ε1 |
ν |
|||||||||||||||||||||
|
jk12 |
! |
q |
|
|
|
|
p |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
n (r ) × N |
µ (k2r ) · N |
|
|
(k1r ) |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
π |
|
S |
ν |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
" |
||||||||||
|
|
ε2 |
|
q |
|
|
|
|
p |
|
||||||||||||||||
+ |
|
|
|
|
|
|
|
|
n (r ) × M µ |
(k2r ) |
· M |
|
|
|
(k1r ) dS (r ) , |
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
ε1 |
ν |
|
||||||||||||||||||||
|
jk12 ! |
|
q |
|
|
|
|
|
|
|
|
p |
||||||||||||||
|
|
|
|
|
|
|
|
n (r ) × M µ (k2r ) · M |
|
(k1r ) |
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
π |
|
|
S |
ν |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
" |
||||||||||||||||
|
ε2 |
|
q |
|
|
p |
|
|||||||||||||||||||
+ |
|
|
|
|
|
|
|
|
n (r ) × N µ |
(k2r ) |
· N |
|
|
(k1r ) dS (r ) , |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
ε1 |
|
ν |
||||||||||||||||||
|
jk12 ! |
q |
|
|
|
|
|
|
|
p |
||||||||||||||||
|
|
|
|
|
|
|
n (r ) × N |
µ (k2r ) · M |
|
(k1r ) |
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
π |
|
S |
|
ν |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
" |
|||||||||||||||||
|
|
ε2 |
|
q |
|
|
p |
|
||||||||||||||||||
+ |
|
|
|
|
|
|
|
|
n (r ) × M µ (k2r ) |
· N |
|
|
(k1r ) dS (r ) . |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
ε1 |
|
ν |
|
||||||||||||||||||
(2.11)
(2.12)
(2.13)
(2.14)
Considering the scattered field representation (2.5), we replace the surface fields by their approximations and use the vector spherical wave expansion of the dyad gI on a sphere enclosing Di to obtain
N |
|
EsN (r) = fνN M ν3 (ksr) + gνN N ν3 (ksr) , |
(2.15) |
ν=1 |
|
where the expansion coe cients of the scattered field are given by
$ fνN % |
= |
jks2 |
N |
||||||
gνN |
|
|
|
|
|
|
e |
i |
|
|
π |
S |
|||||||
|
|
|
|
||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
+ j |
|
µs |
|
|
N |
||
|
|
|
|
|
hi |
||||
|
|
|
|
εs |
|||||
|
|
|
|
|
|
|
|
|
|
$%
N 1 (ksr ) (r ) · ν
M 1ν (ksr )
$%
M 1 (ksr )
(r ) · ν dS (r ) (2.16)
N 1ν (ksr )