


 Содержание
Содержание
Введение……....……………………………………………………………...….3
1 Расчет основных сил, действующих в системе…...………..……………4
2 Определение мощности двигателя скипового подъемника................. 7
3 Выбор двигателя…………………………………….……………………….10
4 Выбор редуктора………………………………..……………………………17
5 Расчет тиристорного преобразователя…………………..………………18
5.1 Расчет параметров силового трансформатора……………………19
5.2 выбор тиристоров управляющего преобразователя……………...22
5.3 Определение эквивалентных параметров цепи якоря ДПТ……..24
6 статический расчет…………………………………………………………..26
6.1 Выбор тахогенератора……………………………………………...… 26
6.2 Расчет и построение электромеханических характеристик……. 26
6.3 Расчет коэффициентов усиления электромеханической системы…………....................................................................................... 30
7. Динамический расчет приводной системы…………………………......34
8 Описание работы электропривода………………………………………..41
Заключение……………………...……………………………….....…………. 45
Список литературы……….....……….………………………….…………….46
Введение

Мехатронная система (МС) - это неразделимая совокупность механических, электромеханических и электронных узлов, в которых осуществляется преобразование и обмен энергии, информации. В современных мехатронных системах преобразование движения одного или нескольких тел в требуемые движения других тел осуществляется системой тел (деталей), называемых механизмом. Механизмы входят в состав машин — технических систем (ТС) и предназначены для осуществления механических движений по преобразованию потоков энергии, силовых взаимодействий, необходимых для выполнения различных рабочих процессов. Часто силовой основой в МС является электропривод постоянного или переменного тока, формирующий управляемую электротехническую систему или комплекс. Для электротехнических систем управления характерна тесная взаимосвязь электромеханической части с цепями ее питания и регулирования. Поэтому суммарные характеристики устройств часто определяются всеми функциональными звеньями в равной степени. Управляемые комплексы с электромеханическим приводом (система, состоящая из двигателя и связанных с ним устройств приведения в движение одного или нескольких исполнительных механизмов, входящих в состав МС) получили название электромеханических систем (ЭМС).
Создание нового образца МС обычно сопровождается использованием в разнообразных вариантах гибких технологических решений. Разновидностью этого принципа является модульный подход. Модули могут легко соединяться, образуя сложные технические системы. Разъединяться и заменяться с целью получения ТС с другими компонентами и техническими характеристиками при модернизации, ремонте. В общем случае модуль характеризуется конструктивной и технологической завершенностью, обладает строго фиксированными параметрами (функциональные характеристики, геометрические размеры), принадлежащие заранее установленным параметрическим типоразмерным рядам.
1 Расчет основных сил, действующих в системе

Рисунок 1.1 - Силы, действующие на скип.

 1.1
Сила, действующая на канат
1.1
Сила, действующая на канат
![]() ,
обусловленная весом скипа с грузом
,
обусловленная весом скипа с грузом
![]()
где G - вес скипа с грузом, G, H;
– угол наклона, = 40°.
![]() (1.1)
(1.1)
1.2
Сила, действующая на колеса скипа
![]()
![]()
![]() (1.2)
(1.2)
1.3
Сила,
действующая на канат, обусловленная
трением реборд и колес
о
рельсы и трением в цапфах колес
![]()
![]() (1.3)
(1.3)
![]()
где К - коэффициент, учитывающий трение реборды колеса о рельс, К=1.35;
Lk — радиус колеса, Rk=l9 см;
μ - коэффициент трения в цапфе, ц=0.1;
![]() -
радиус цапфы,
-
радиус цапфы,
![]() =
5 см;
=
5 см;
f- коэффициент трения качения колеса по рельсу, f=0.06 см.
1.4
Суммарная сила, действующая на канат
![]()
![]() (1.4)
(1.4)
![]()
1.5
Приведенный к валу двигателя статический
момент
![]()


![]() (1.5)
(1.5)
где
![]() -
скорость подъема,
-
скорость подъема,![]()
![]() -
угловая скорость вращения двигателя,
-
угловая скорость вращения двигателя,
![]()
![]()
1.6
Момент
инерции движущейся части тележки
![]()
![]() (1.6)
(1.6)
![]()
![]()
![]()
![]()
![]()
1.7
Суммарный
маховый момент скипового подъемника,
приведённый к
валу
двигателя
![]()
![]() (1.7)
(1.7)

2 Определение мощности двигателя скипового подъемника

Спуск и подъём скипа производятся с различной скоростью. Паузы после спуска и подъема равны 35с. каждая. Для учёта потерь при пуске и торможении эквивалентная мощность, определяющаяся статической нагрузкой, должна быть увеличена на 15%.
2.1
Полезное усилие в тросе при подъеме
нагруженного скипа
![]()
![]() (2.1)
(2.1)
![]()
2.1
Дополнительное усилие, необходимое для
преодоления трения качения
![]()
![]() (2.2)
(2.2)
![]()
2.1
Дополнительное усилие, необходимое для
преодоления трения скольжения
в цапфах
![]()
![]() (2.3)
(2.3)
![]()
2.4 Дополнительное усилие в
тросе, обусловленное трением при подъеме
скипа с учетом трения в ребордах
![]()
![]() (2.4)
(2.4)
![]()
2.5
Полное усилие в тросе
![]() ,
при подъеме груза
,
при подъеме груза
![]() (2.5)
(2.5)
![]()
2.6
Мощность
![]() ,
развиваемая двигателем при подъеме
,
развиваемая двигателем при подъеме
![]() (2.6)
(2.6)
![]()
2.7
Время подъема
![]()
![]() (2.7)
(2.7)


![]()
2.8
Полезное усилие в тросе
![]() ,
при спуске порожнего скипа
,
при спуске порожнего скипа
![]() (2.8)
(2.8)
![]()
2.9
Усилие
![]() ,
необходимое для преодоления трения
качения
,
необходимое для преодоления трения
качения
![]() (2.9)
(2.9)
![]()
2.10
Усилие
![]() ,
необходимое для преодоления трения
скольжения в цапфах
,
необходимое для преодоления трения
скольжения в цапфах
![]() (2.10)
(2.10)
![]()
2.11 Усилие в тросе, обусловленное трением при спуске порожнего скипа с учетом трения в ребордах:
![]() (2.11)
(2.11)
![]()
2.12
Полное усилие в тросе
![]() ,
при спуске порожнего скипа
,
при спуске порожнего скипа
![]() (2.12)
(2.12)
![]()
2.13
Мощность двигателя при спуске
![]() ,
порожнего скипа
,
порожнего скипа
![]() (2.13)
(2.13)
![]()
2.14
Время спуска
![]()
![]() (2.14)
(2.14)
![]()
Построим график мощности на валу двигателя, при помощи которого определим эквивалентную мощность

Рисунок 2.1 - График мощностей на валу двигателя при подъеме и спуске скипа
2.15 Эквивалентная мощность
 (2.15)
(2.15)
![]()
2.16 Номинальная мощность двигателя


![]() (2.16)
(2.16)
![]()
3 Выбор двигателя
Предварительный выбор двигателя из справочной литературы По результатам расчёта номинальной мощности из справочников были выбраны следующие двигатели:
Таблица 3.1 - Параметры выбранных двигателей.
-
Тип двигателя
nном
Рн
Jя
Rя
Iном
ηн
Uном
об/мин
кВт
кг·м2
Ом
А
--
В
П62
1500
14
0.085
0.174
79
0.875
220
2ПФ180LУХЛ4
1000
14
0.0603
0.251
79
0.82
220
П81
750
14
0.083
0.278
79
0.8
220
2ПН200МУХЛ4
2500
13
0.0662
0.227
36.3
0.85
220
Окончательно требуется выбрать только один из двигателей. Для этого необходимо построить энергетические характеристики для каждого из них, а затем по графику выбрать соответствующий требуемым параметрам подъемника.
Для построения энергетических характеристик, для каждого двигателя необходимо рассчитать следующие параметры:
3.1
Номинальная угловая скорость вращения
двигателя
![]() :
:
![]() (3.1)
(3.1)
где n – номинальная частота вращения двигателя


![]()
![]()
![]()
![]()
3.2 Номинальный вращательный момент двигателя
![]() (3.2)
(3.2)
![]()
![]()

![]()
![]()
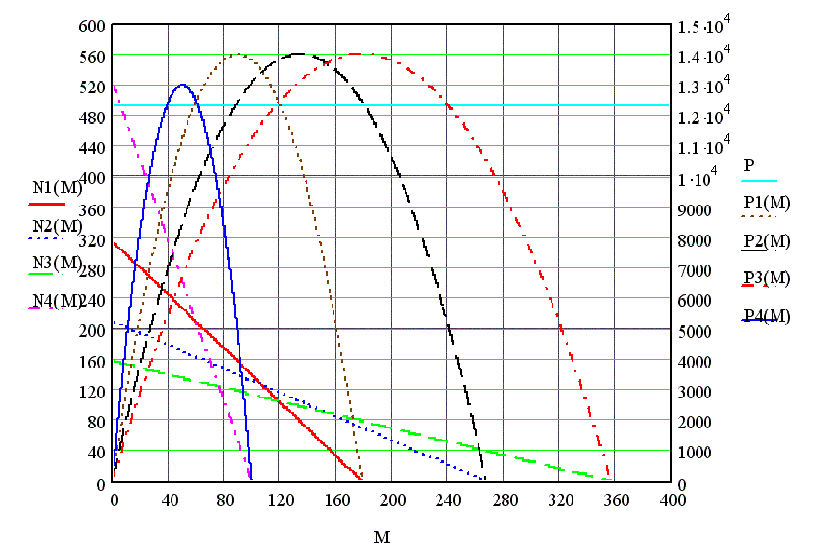
Рисунок
3.1 - Энергетические характеристики
двига телей
телей
3.3 Требуемый момент для подъема нагруженного скипа:
![]() (3.3)
(3.3)
![]()
3.4 Требуемая угловая скорость для подъема нагруженного скипа:
![]() (3.4)
(3.4)
![]()
3.5
Рассчитываем 
 ориентировочное
значение передаточного числа редуктора:
ориентировочное
значение передаточного числа редуктора:
![]() (3.5)
(3.5)
![]()

![]()
![]()
![]()
3.6 Определяем полученную после редуктора с ориентировочным передаточным числом линейную скорость:
![]() (3.6)
(3.6)
![]()
![]()
![]()
![]()
3.7 Проверяем, удовлетворяют ли полученные значения условию:
![]() (3.7)
(3.7)
![]()
![]()
![]()
![]()
Так как все значения линейных скоростей перемещения скипа, получаемых после редуктора, значительно меньше требуемой скорости подъема Vп = 1.3 м/с, то необходимо применить двигатель с большей мощностью и произвести корректировку реальных передаточных чисел выбранных редукторов.
Исходя из массогабаритных параметров, требований, предъявляемых к разрабатываемой ЭМС и ограничений, связанных с выбором редуктора (максимальная скорость вращения быстроходного вала ряда редукторов ограничена 2000 об/мин) выбираем двигатели номинальной мощностью 25 кВт и с максимальной частотой вращения до 2000 об/мин.
Таблица 3.2 - Параметры выбранных двигателей.
-
Тип двигателя
nном
Рн
Jя
Rя
Iном
ηн
Uном
об/мин
кВт
кг·м2
Ом
А
--
В
П72
2000
25
1.6
0.15
132
0.82
220
П82
1500
25
3.1
0.093
218
0.815
220
П92
750
25
7.0
0.15
136
0.815
220
3.8 Номинальная угловая скорость вращения двигателя:

![]()
![]()
![]()
3.9 Номинальный вращательный момент двигателя
![]()
![]()
![]()

Рисунок
3.2 - Энергетические характеристики
двигателей с
![]()
3.10
Рассчитываем 
 ориентировочное
значение передаточного числа редуктора:
ориентировочное
значение передаточного числа редуктора:
![]()

![]()
![]()
3.11 Определяем полученную после редуктора с ориентировочным передаточным числом линейную скорость:
![]()

![]()
![]()
3.12 Проверяем, удовлетворяют ли полученные значения условию:
![]()
![]()
![]()
3.13 Определяем реальное передаточное число и пересчитываем линейную скорость.
Реальное передаточное число для цилиндрических двухступенчатых редукторов выбирается из ряда: 8;10;12,5;16;20;25;31.5;40.
Соответственно выбираем для каждого двигателя ближайшее наибольшее передаточное число.
Для
ДПТ П62 принимаем
![]()
Для
ДПТ П82 принимаем
![]()
Для
ДПТ П92 принимаем
![]()
3.14 Пересчитаем линейные скорости:


![]() (3.8)
(3.8)
![]()

![]()
![]()
Исходя из ранее перечисленных ограничений и оптимальных параметров системы, выбираем двигатель (ДПТ типа П92) со следующими параметрами:
напряжение Uя ном= 220 В;
номинальная мощность Pном = 25000 Вт;
номинальный ток якоря Iя = 136 А;
КПД h= 81.5%;
момент инерции якоря двигателя Jдв = 7.0 кГ·м2;
сопротивление якорной обмотки
 Rя
ном = 0,15 Ом;
Rя
ном = 0,15 Ом;
4 Выбор редуктора
Выбор редуктора осуществляется по следующим параметрам:
- передаточное число;
- мощность;
- передаваемый крутящий момент;
- геом етрические
размеры, если они указаны в задании;
етрические
размеры, если они указаны в задании;
-для мехатронной системы, в которой редуктор является конструктивным элементом, необходимо учесть и массово-габаритные параметры редуктора.
По рассчитанным параметрам мощности и передаточного числа двигателя постоянного тока подбираем соответсвующий редуктор во вспомогательной литературе: «Приводы машин: справочник», под ред. В.В. Длоугий, Т.И. Муха, изд. Машиностроение, 1982 – 383 с..
Таблица 4.1 – Параметры выбранного редуктора
|
Тип редуктора |
Типо-размер |
Межосевое расстояние, мм |
Передава-емая мощность, кВт |
Крутящий момент на тихоходном валу, кН*м |
КПД |
Пере-даточ-ное число |
Завод-изготовитель |
|
Цилиндрический горизонтальный двухступенчатый |
Ц2У - 250 |
410 |
15.4 – 79.6 |
4.0 |
0.97 |
12.5 |
Ижевский редукторный завод |
5 Расчет тиристорного преобразователя
Существуют однофазные и трехфазные схемы управляемых выпрямителей. Однофазные схемы применяют для электромеханических мехатронных систем (ЭММ) малой мощности(2-2,5 кВт), а также для питания обмоток возбуждения двигателей. Для этих же целей могут использоваться трехпульсные схемы преобразователей. Шестипульсные схемы преобразователей(m = 6) применяются для приводов большой мощности, а также, когда необходим большой диапазон регулирования скорости двигателя. Трехфазные схемы управляемых выпрямителей применяют для ЭММ средней и большой мощности(свыше 10 кВт).
Различают реверсивные и нереверсивные преобразователи.
В зависимости от принципа управления нереверсивного привода при параллельном соединении схем применяют уравнительные реакторы, служащие для выравнивания мгновенных значений напряжений двух сдвинутых по фазе систем.
В
основ
 у
построения реверсивных преобразователей
и схем управления положен принцип
совместного или раздельного управления
двухкомплектным преобразователем.
Совместное управление выполняется
согласованным и несогласованным. При
согласованном управлении средние
значения напряжений тиристорных групп
равны друг другу, т. е. выполняется
соотношение:
у
построения реверсивных преобразователей
и схем управления положен принцип
совместного или раздельного управления
двухкомплектным преобразователем.
Совместное управление выполняется
согласованным и несогласованным. При
согласованном управлении средние
значения напряжений тиристорных групп
равны друг другу, т. е. выполняется
соотношение:
![]() (5.1)
(5.1)
где
![]() - углы управления выпрямителей и
инверторной групп.
- углы управления выпрямителей и
инверторной групп.
В
этом случае, между тиристорными группами
протекает уравнительный ток, минуя
нагрузку. Для ограничения величины
уравнительного тока в схеме преобразователя
устанавливают уравнительные реакторы
![]() .
Для сглаживания тока якоря применяются
слаживающие дроссели
.
Для сглаживания тока якоря применяются
слаживающие дроссели![]() .
.
При раздельном управлении тиристорными группами уравнительные реакторы отсутствуют. Управляющие импульсы подаются только на ту группу, которая в данный момент должна работать. На неработающую группу управляющие импульсы не подаются.
Реверсивные преобразователи выполняются чаще всего по встречно – параллельной схеме тиристорных групп, имеющей ряд достоинств. Она содержит простой двухобмоточный силовой согласующий трансформатор, который может быть применен в реверсивном, так и в нереверсивном электроприводе, и имеет меньшую типовую мощность. Схема такого ЭММ может питаться непосредственно от трехфазной сети переменного тока через анодные токоограничивающие реакторы, что позволяет унифицировать конструкции модулей реверсивного и нереверсивного электроприводов.
Так как в данном курсовом проекте потребитель средней мощности с реверсивным электроприводом, то выбираем трехфазную мостовую схему управляемого выпрямителя трехфазного напряжения. Первичная обмотка силового трансформатора Т такого тиристорного преобразователя состоит из трех фаз, соединенных либо в звезду, либо в треугольник.

5.1 Расчет параметров силового трансформатора
5.1.1 Расчет начинают с определения фазной ЭДС вторичной обмотки силового трансформатора.
![]() (5.2)
(5.2)
![]()
Ed0 – противо - ЭДС двигателя, примерно равна UH = 220 В;
КС – коэффициент запаса, учитывающий возможное снижение напряжения сети КС = 1.1;
Кr – коэффициент, учитывающий падение напряжения на активном внутреннем сопротивлении преобразователя (в результате коммутации тиристоров) и сопротивлении нагрузки КК =1,05;
К - коэффициент неполного открытия тиристора при максимальном управляющем сигнале К =1,2.
5.1.2 Действующее значение тока вторичной обмотки трансформатора;
![]()
где Кi2 – схемный коэффициент вторичного тока; Кi2 =1,05;
Кi
– ко эффициент
непрямоугольности, учитывающий отклонение
формы кривой тока от прямоугольной, Кi
= 1,05;
эффициент
непрямоугольности, учитывающий отклонение
формы кривой тока от прямоугольной, Кi
= 1,05;
Iд – номинальный ток двигателя, равен току якоря; Iд=136 (А).
![]()
5.1.3 Действующее значение тока первичной обмотки:
 (5.1.3)
(5.1.3)
![]()
где КТР– коэффициент трансформации трансформатора при номинальном напряжении сети;
Кi1– схемный коэффициент первичного тока; Кi1=0,81;
5.1.4 Типовая расчетная мощность трансформатора
![]() (5.1.4)
(5.1.4)
![]()
где Кт– коэффициент типовой мощности трансформатора (Кт= 1,05);
5.1.5 Номинальная мощность трансформатора
![]() (5.1.5)
(5.1.5)
![]()
В
справочной литературе «Электромеханические
модули мехатронных систем» выбираем
трансформатор типа ТС- 40,
с параметрами, указанными в таблице 4.
40,
с параметрами, указанными в таблице 4.
Таблица 5.1.1 – Технические данные выбранного силового трансформатора
|
Тип трансформатора |
S1H, кВА |
U2Л, В |
UКЗ, % |
|
|
ТС-60 |
60 |
220 |
4.3 |
2.2 |
5.1.6 Действующее значение тока фазы вторичной обмотки для выбранного трансформатора:
![]() (5.1.6)
(5.1.6)
![]()
где S1H– теоретическая типовая мощность выбранного трансформатора;
U2Л–линейная ЭДС вторичной обмотки трансформатора.
5.1.7 Полное сопротивление фазы трансформатора:
![]() (5.1.7)
(5.1.7)
![]()
где UКЗ– номинальное напряжение короткого замыкания.
 5.1.8
Потери мощности в обмотках трансформатора
при коротком замыкании:
5.1.8
Потери мощности в обмотках трансформатора
при коротком замыкании:
![]() (5.1.8)
(5.1.8)
![]()
где РКЗ – мощность при коротком замыкании;
5.1.9 Активное сопротивление фазы трансформатора:
![]() (5.1.9)
(5.1.9)
![]()
5.1.10 Индуктивное сопротивление фазы трансформатора:
![]() (5.1.10)
(5.1.10)
![]()
5.1.11 Индуктивность фазы трансформатора:
![]() (5.1.11)
(5.1.11)
![]()
где fC– частота питающей сети; fC=50 Гц.