

Строительная механика машин
.docПолучаем систему уравнений нулевого приближения в связной системе координат.

![]()
![]()
![]()
Компоненты вектора
![]() есть
малые углы поворота связанных осей
относительно своего естественного
состояния. Вектор
есть
малые углы поворота связанных осей
относительно своего естественного
состояния. Вектор
![]() характеризует
смещение точек осевой линии стержня
относительно естественного состояния.
характеризует
смещение точек осевой линии стержня
относительно естественного состояния.
Представим векторные произведения в виде:

Тогда получаем векторные уравнения
относительно
![]()

![]()
![]()
Где

Приращения кривизны можно найти из уравнения
![]()
Для следящих
нагрузок
![]()
Уравнения равновесия нулевого приближения в декартовой системе координат
Так как
![]() ,
то
,
то
![]() ,
где
,
где
![]() .
.
При малых углах поворота связанных осей
![]() ,
,
![]() , тогда
, тогда
![]()
![]()
Окончательно получаем следующую систему векторных уравнений, связанных с базисом {ij}:

![]()
![]()
Здесь матрицы


Уравнения равновесия первого приближения в связанной системе координат
Положим

Векторы с индексом (1) назовем
векторами первого приближения. Причем
компоненты
![]() - малые величины.
- малые величины.
Рассмотрим уравнение

Причем
![]() мало, тогда
мало, тогда
![]()
Тогда, уравнение 0-го приближения
![]()
уравнение 1-го приближения
![]()
Где
![]() .
.
Векторы
![]() находятся из уравнений 0-го приближения.
находятся из уравнений 0-го приближения.
Векторы
![]() находятся из уравнений 1-го приближения.
находятся из уравнений 1-го приближения.
Поступая аналогично с остальными уравнениями, получаем наряду с системой уравнений 0-го приближения, систему уравнений 1-го приближения:
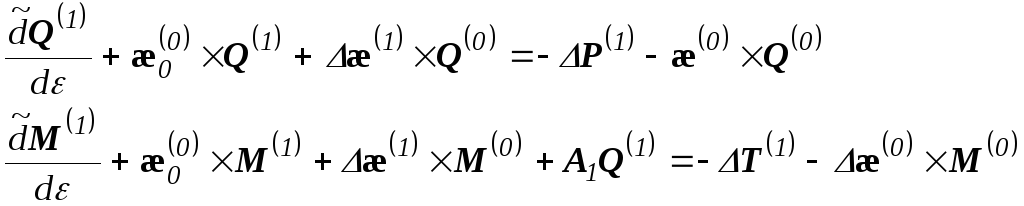
![]()
![]()
![]()
Для следящих нагрузок
![]() .
.