

Тверской государственный технический университет
Кафедра АТП
Лабораторная работа № 12
Изучение принципа действия, устройства
электропневматического преобразователя
и освоение методики его поверки
1. Цель работы
Изучение принципа действия и устройства электропневматического преобразователя и освоение методики его поверки.
2. Задание на работу
Изучить принцип действия и конструкцию электропневматического преобразователя (ЭПП).
Осуществить поверку ЭПП.
Определить абсолютную, приведенную погрешности и вариацию ЭПП
Сделать заключение о его пригодности к эксплуатации.
3. Назначение и принцип действия электропневматического преобразователя
ЭПП различных конструкций предназначены для преобразования унифицированных токовых сигналов (0–5) мА; (0–20) мА и (4–20) мАв унифицированный пневматический сигнал 0,02–0,1 мПа (0,2–1,0) кгс/см2). Они широко используются в системах автоматического регулирования, реализованных на цифровых и аналоговых электрических регуляторах, в системах непосредственного цифрового управления, использующих ЭВМ, для преобразования управляющего электрического токового сигнала в пневматический, поступающего к пневматическим исполнительным механизмом пропорционального действия. Последние являются в настоящее время наиболее удобными и часто используемыми при управлении технологическими процессами в различных отраслях промышленности.
ЭПП имеют очень широкое применение в таких ведущих отраслях промышленности, как химическая, нефтехимическая, нефтеперерабатывающая и др., где из-за высокой пожаровзрывоопасности применяются пневматические системы автоматического регулирования. Здесь ЭПП применяют для преобразования унифицированных токовых сигналов электрических нормирующих преобразователей. Последние в основном используются для измерения температуры в комплекте с термоэлектрическими и терморезисторными преобразователями температуры. Наибольшее распространение получили ЭПП, реализующие в своей работе метод уравновешивающего следящего статического преобразования» Классы точности ЭПП составляют 0,5; 1; 1,5» Схема одного из ЭПП показана на рис. 1.
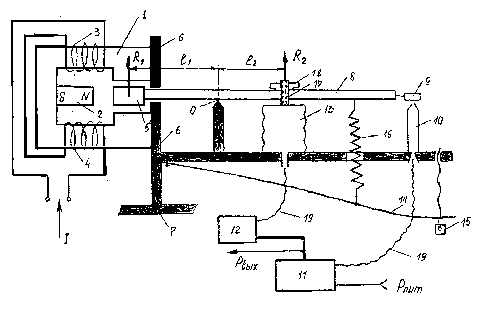
Рис. 1. Схема электропневматического преобразователя
Преобразуемый электрический унифицированный сигнал I, способный изменяться в диапазоне (0–5) мА, поступает на магнитоэлектрический преобразовательный элемент, состоящий из магнитопровода 1, постоянного магнита2,катушек 3,4 и сердечник 5. Магнитоэлектрический преобразовательный элемент укреплен на кронштейне 6, а последний - на корпусе 7 ЭПП. При протекании по катушкам 3 и 4 токаIвокруг них возникает постоянное по направлению магнитное поле, от которого намагничивается сердечник 5 . При этом магнитное поле сердечника 5 взаимодействует с магнитным полем постоянного магнита 2, В результате этого взаимодействия возникает силаR1, которая воздействует на измерительный рычаг 8, размещенный на шарнире. СилаR1создает на рычаге 8 моментМ1, который поворачивает измерительный рычаг вокруг точки вращения 0 по часовой (на рисунке) стрелке. При этом заслонка 9 приближается к соплу 10. К этому соплу из пневматического усилителя мощности 11 непрерывно подается поток сжатого воздуха, который поступает в усилитель из линии питания с давлениемРпит.=1,4 кгс/см2 (0,14МПа). Приближение заслонки 9 к соплу 10 вызывает увеличение давления сжатого воздуха на выходе пневмоусилителя 11. СигналРвыхэтого усилителя через пневматическую ёмкость 12, служащую для исключения колебаний выходного сигнала при резких изменениях преобразуемого тока, поступает в сильфон 13 отрицательной обратной связи и на выход ЭПП. Под действием сигналаРвыхсильфон 13 создает на измерительном рычаге 8 силуR2, вращающий моментМ2, которой направлен противоположно моментуM1 силыR1. Движение всей системы происходит до тех пор, пока моментМ1не будет уравновешен моментомM2. При этом измерительный рычаг зайдет некоторое новое положение (отличное от начального), при котором заслонка 9 окажется на меньшем удалении от сопла 10. Для моментовМ1иМ2можно записать:
M1 = R1 l1 =k1 I l1 (1)
M2 = R2 l2 =Fэф Pвых l2 (2)
где l1иl2– плечи силR1иR2;
к1- коэффициент, зависящий от конструкции магнитоэлектрического преобразовательного элемента и магнитной индукции постоянного магнита 2,
Fэф.- эффективная площадь сильфона (часть геометрической площади, участвующей в преобразовании давления в силу).
Из выражений (I) и (2) с учетом условий равновесия:
M1= М2 (3)
можно найти
![]() ,
(4)
,
(4)
где
![]() .
.
- коэффициент преобразования ЭПП. С учетом того факта, что унифицированный пневматический сигнал должен изменяться в диапазоне значений давления от 0,2 до 1,0 кгс/см*см (0,02 + 0,1 МПа), в ЭПП предусмотрены соответствующие узлы Настройки, а именно: пластина 14, винт 15, пружина 16, винт 17, контргайка 18 .С помощью элементов 14, 15 и 16 устанавливается начальный уровень выходного сигнала ЭПП, а путем изменения производительного сжатия сильфона 13 с помощью винта 17 настраивается диапазон изменения выходного сигнала ЭПП. Все соединения пневматических элементов в ЭПП выполнены пластмассовыми трубками 19 . Выходной сигнал ЭПП описывается выражением
Рвых =К*I + 0,2 (кгс/см2). (5)
С учетом того, что верхний Iв и нижний Ih пределы измерений по входу ЭПП равны Iв=5 мА, Iн=0, соответствующие пределы измерения по выходу равны: Pвых(в)=1 кгс/см2 и Pвых( н) =0,2 кгс/см2, можно получить для коэффициента К:
К=(Pвых ( в)-Pвых ( н))/(Iв-Iн)=(1-0,2)/(5-0)=0,16 кгс/см2. (6)
Тогда
Pвых=0,16*I + 0,2 кгс/см2. (7)
Выражение (7) является функцией преобразования ЭПП. Её используют для расчетов значений выходного сигнала при поверке ЭПП.