

2. Анализ передаточных функций исходной разомкнутой системы
Манипулятор робота:
J=0.1;
b=1;
man=tf([0,1],[j,b])
Transferfunction:
1
---------
0.1 s+ 1
Усилитель мощности:
k=20;
um=tf([0,k],[0,1])
Transfer function:
20
Двигатель:
km=30;
rf=10;
dv=tf([0,km],[0,rf])
Transfer function:
3
Разомкнутая система:
sys_raz=tf(man*um*dv)
Transfer function:
600
------
s + 10
zpk форма разомкнутой системы:
zpk(sys_raz)
Zero/pole/gain:
600
------
(s+10)
Из zpkвидно, что система стостоит из Апериодического звена 600/(s+10)
Полюса разомкнутой системы:
pole(sys_raz)
ans =
-10
Нули разомкнутой системы:
zero(sys_raz)
ans =
Empty matrix: 0-by-1
Все полюса меньше нуля, откуда можно сделать вывод, что система устойчивая.
Карта нулей и полюсов:
pzmap(sys_raz)
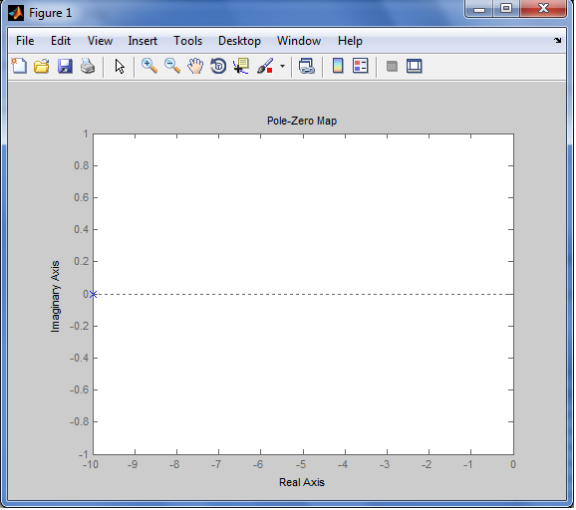
Рис. 3 График нулей и полюсов разомкнутой системы.
s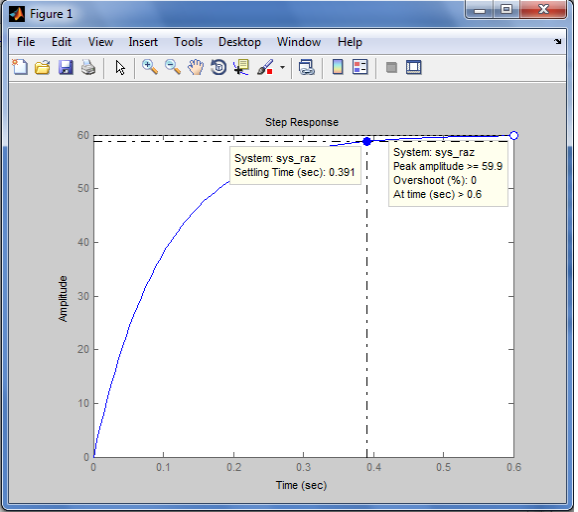 tep(sys_raz)
tep(sys_raz)
Рис. 4График переходного процесса разомкнутой системы при единичном входном сигнале.
3. Анализ устойчивости исходной замкнутой системы
Замыкаем приведенную передаточную функцию системы единичной обратной связью. Система с отрицательной обратной связью называется замкнутой системой.
Передаточная функция исходной замкнутой системы:
sys_zam=feedback(sys_raz,1)
Transfer function:
600
-------
s + 610
zpk модель замкнутой системы:
zpk(sys_zam)
Zero/pole/gain:
600
-------
(s+610)
Полюса замкнутой системы
pole(sys_zam)
ans =
-610
Так как все полюса отрицательные, то замкнутая система устойчивая.
Нули и полюса замкнутой системы
pzmap(sys_zam)
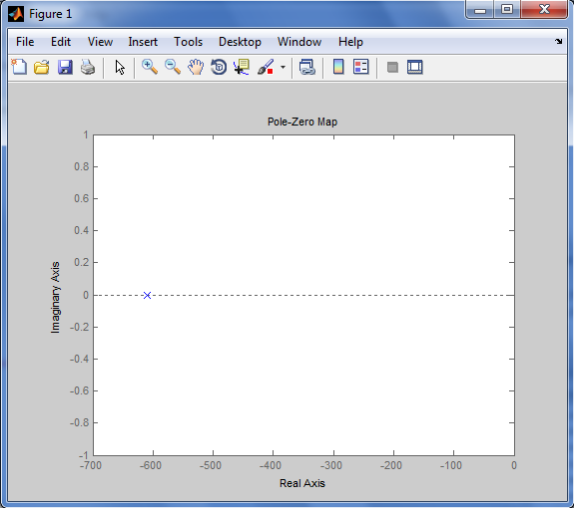
Рис. 5 График нулей и полюсов замкнутой системы
График переходного процесса
s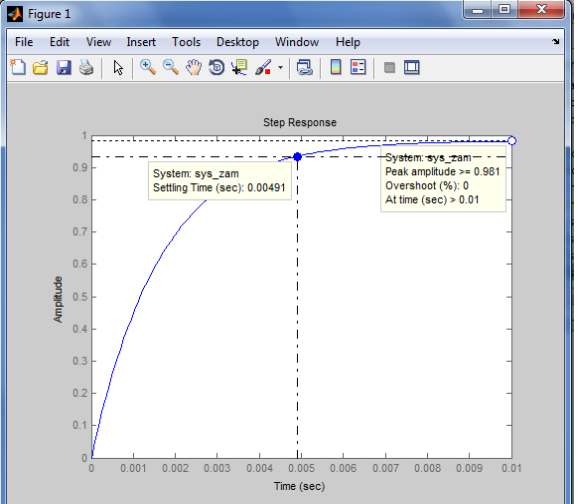 tep(sys_zam)
tep(sys_zam)
Рис. 6 График переходного процесса замкнутой системы при единичном входном сигнале
При сравнении разомкнутой и замкнутой системы можно сделать вывод о том, что обратная связь положительно влияет на систему, существенно улучшая ее качество, о чем говорит уменьшение времени переходного процесса с 0,39 до 0,00491 sec.
4. Анализ точности исходной замкнутой системы управления
Находим погрешность системы:
dcgain(1-sys_zam)
ans =
0.0164
Рассмотрим как поведет себя погрешность системы при других k:
k=2:
dcgain(1-sys_zam2)
ans =
0.1429
k=200:
dcgain(1-sys_zam3)
ans =
0.0017
Видно, что при уменьшении коэффициента погрешность возрастает, что отрицательно сказывается на исследуемой системе.
5. Анализ качества исходной замкнутой системы
Качество характеризуется многими динамическими показателями, среди которых
выделяются быстродействие и перерегулирование.
Быстродействие показывает, как быстро система откликается на изменение внешних условий, и измеряется временем переходного процесса.
Перерегулирование указывает на возможный колебательный характер переходного процесса и измеряется в процентах по переходной функции.
При k=2 система устойчива

Рис. 7 График качества системы
Как видно из графика перерегулирование (overshoot) = 0%, время переходного процесса (settling time) = 0,0428 sec.
При k=200 система так же устойчивая:
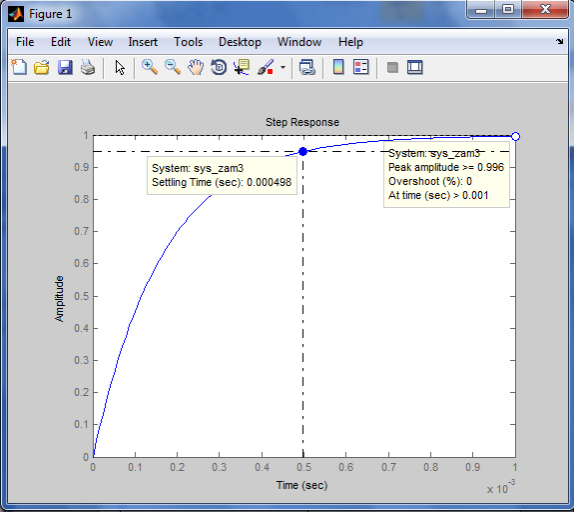
Рис. 8 График качества системы
Как видно из графика перерегулирование (overshoot) = 0%, время переходного процесса (settling time) = 0,000498 sec.
Строим график для сравниваемых систем:
step(sys_zam,sys_zam2,sys_zam3)
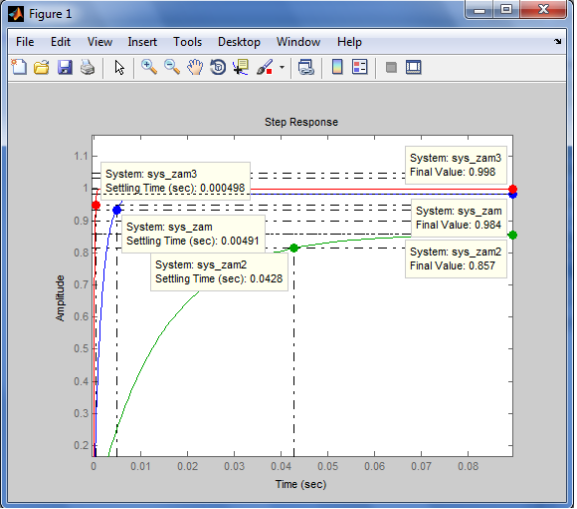
Рис. 9 График улучшения качества системы
Здесь синийграфик — исходная система сk=20;
перерегулирование (overshoot) = 0%, время переходного процесса (settling time) = 0,00491sec.
красныйграфик — система сk=200;
перерегулирование (overshoot) = 0%, время переходного процесса (settling time) = 0,000498 sec.
зеленыйграфик — система сk=2.
перерегулирование (overshoot) = 0%, время переходного процесса (settling time) = 0,0428 sec.
Вывод:при измененииkу системы менялся параметр времени переходного процесса. Как видно из графиков, при увеличенииkвремя переходного процесса уменьшается, а следовательно качество системы увеличивается. Такое время переходного процесса вполне достаточно для хорошей работы системы управления промышленным роботом, поэтому дальнейшее увеличение усилителя можностиk не целесообразно.