

1.2 Зажимные зу
При конструировании наиболее распространенных зажимных ЗУ роботов необходимо учитывать конкретный тип детали или группы деталей, их форму, материал и условия ТП. Важные критерии при этом – необходимая точность удержания детали и допустимое усилие на губках. Следовательно, до этого времени сделано большое количество разных зажимных ЗУ, которые отличаются кинематической схемой и другими конструктивными параметрами. Как правило, зажимные ЗУ приводятся в движение с помощью пневматического или пневмогидравлического привода, размещённого в основе прибора. Эластичный зажимный ЗУ предназначенный для захвата и удержания лёгко деформированных изделий, например электрические лампы, и несколько отличаются от остальных ЗУ данного типа. Этот прибор приводится в действие давлением воздуха.
Расчёты зажимных ЗУ включает нахождение сил, которые действуют в местах контакта заготовки и губок; вычисление усилий привода; проверка отсутствия неполадок поверхности объекта при захвате; расчёт на прочность детали прибора.
Силы, которые действуют в местах контакта ЗУ с объектами манипулирования, вычисляются по формулам, приведенные в таблице.
Схемы удержания объектов в зажимном ЗУ делятся на:
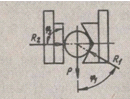
а) объект поддерживается губками, силы трения слабо влияют на механизм удержания объекта в таблице 1.1;
Таблица 1.1 – Схема и расчетная формула
|
|
где
i, j=1;
|

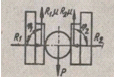
б) объект удерживается с помощью запорным действием губок при ограниченном действии силы трения в таблице 1.2;
Таблица 1.2 – Схема и расчетная формула
|
|
|
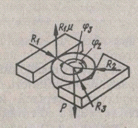
в) объект удерживается силами трения в таблицах 1.3 и 1.4.
Таблица 1.3 – Схема и расчетная формула
|
|
|
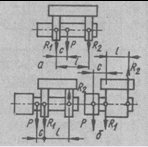
На практике обычно встречается сложная загрузка зажимных ЗУ в виде комбинации указанных в таблице1.4. При этом в процессе манипулирования объектом характер нагрузки ЗУ и схемы удержания объекта могут изменяться. Поэтому расчет должен вестись для критического случая нагрузки ЗУ.
Таблица 1.4 – Схема и расчетная формула
|
|
где
i, j, k=1, 2, 3;
|
При несимметрическом расположении нагрузок по ширине губок нагрузка на крайние перерезы ЗУ вычисляется согласно таблице 1.5. Нагрузка ЗУ должна отвечать отмеченным выше значениям.
Таблица 1.5 – Схема и расчетная формула
-
Для а:
 ,
,
Для б:
 ;
;
В общем случае усилия, что развивается приводом зажимного ЗУ, выражается примером:
![]()
где
![]() - коэффициент запаса
- коэффициент запаса![]() ;
;
![]() -
передаточный коэффициент механизма;
-
передаточный коэффициент механизма;
![]() -
усиление тискав на i-й губке;
-
усиление тискав на i-й губке;
m – количество губок в захвате;
![]() -
коэффициент полезного действия (КПД)
механизма.
-
коэффициент полезного действия (КПД)
механизма.
Для симметрических губок усилия, что развивается приводом, можно рассчитать по формуле:
![]()
Усиление захвата на i-й губке выражается формулой:
![]()
где
![]() - усиление контактирования, которое
можно найти по формулам, приведённых в
таблице 1.1 – 1.5;
- усиление контактирования, которое
можно найти по формулам, приведённых в
таблице 1.1 – 1.5;![]() - угол контакта;
- угол контакта;
k – число точек контакта.
Коэффициент
![]() вычисляется соответственно с выбранной
типовой схемой ЗУ. Обозначение его одной
из этих схем приведены ниже. Коэффициент
трения
вычисляется соответственно с выбранной
типовой схемой ЗУ. Обозначение его одной
из этих схем приведены ниже. Коэффициент
трения![]() губок захвата с заготовкой выбирается
в зависимости от её материала:
губок захвата с заготовкой выбирается
в зависимости от её материала:
Таблица
1.6 – Коэффициент трения
![]() губок захвата
губок захвата
|
Состыкованные поверхности |
|
|
Дерево по резине |
0,8 |
|
Сталь по стали: |
|
|
для не завёрнутых губок без засечки: из стали |
0,12-0,15; 45,50 |
|
для завернутых губок с острой засечкой из |
0,3 – 0,35 |
|
стали 65Г, 60С2, 48А, У10А при HRC 55 |
|
|
Латунь по стали |
0,12 |
|
Стекло по резине |
0,6 |
|
Дуралюмин по стали |
0,1 |