

Freescale Semiconductor
Data Sheet
MC3PHAC
Rev. 2, 7/2005
MC3PHAC Monolithic Intelligent
Motor Controller
Overview
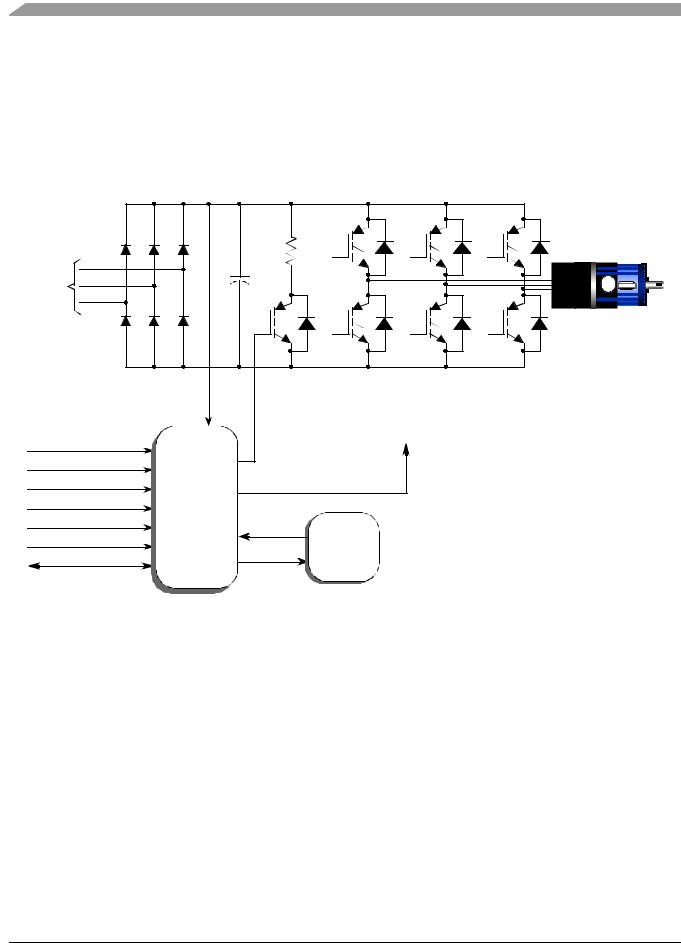
The MC3PHAC is a high-performance monolithic intelligent motor controller designed specifically to meet the requirements for low-cost, variable-speed, 3-phase ac motor control systems. The device is adaptable and configurable, based on its environment. It contains all of the active functions required to implement the control portion of an open loop, 3-phase ac motor drive.
One of the unique aspects of this device is that although it is adaptable and configurable based on its environment, it does not require any software development. This makes the MC3PHAC a perfect fit for customer applications requiring ac motor control but with limited or no software resources available.
The device features are:
•Volts-per-Hertz speed control
•Digital signal processing (DSP) filtering to enhance speed stability
•32-bit calculations for high-precision operation
•Internet enabled
•No user software development required for operation
•6-output pulse-width modulator (PWM)
•3-phase waveform generation
•4-channel analog-to-digital converter (ADC)
•User configurable for standalone or hosted operation
•Dynamic bus ripple cancellation
•Selectable PWM polarity and frequency
•Selectable 50/60 Hz base frequency
•Phase-lock loop (PLL) based system oscillator
•Serial communications interface (SCI)
•Low-power supply voltage detection circuit
Included in the MC3PHAC are protective features consisting of dc bus voltage monitoring and a system fault input that will immediately disable the PWM module upon detection of a system fault.
© Freescale Semiconductor, Inc., 2005. All rights reserved.
Overview
Some target applications for the MC3PHAC include:
•Low horsepower HVAC motors
•Home appliances
•Commercial laundry and dishwashers
•Process control
•Pumps and fans
|
|
|
3-PHASE |
|
|
|
AC MOTOR |
AC IN |
|
|
|
|
BUS VOLTAGE |
|
|
|
FEEDBACK |
RESISTIVE |
|
|
|
BRAKE |
|
|
|
CONTROL |
TO GATE DRIVES |
START/STOP |
|
|
|
|
|
|
|
FORWARD/REVERSE |
|
|
|
SPEED |
|
|
PWM’s |
ACCELERATION |
MC3PHAC |
|
|
PWM FREQUENCY |
|
|
|
|
|
PASSIVE |
|
FAULT |
|
|
|
|
|
INITIALIZATION |
|
SERIAL INTERFACE |
|
|
NETWORK |
|
|
(OPTIONAL) |
|
|
|
|
Figure 1. MC3PHAC-Based Motor Control System
As shown in Table 1, the MC3PHAC is offered in these packages:
•Plastic 28-pin dual in-line package (DIP)
•Plastic 28-pin small outline integrated circuit (SOIC)
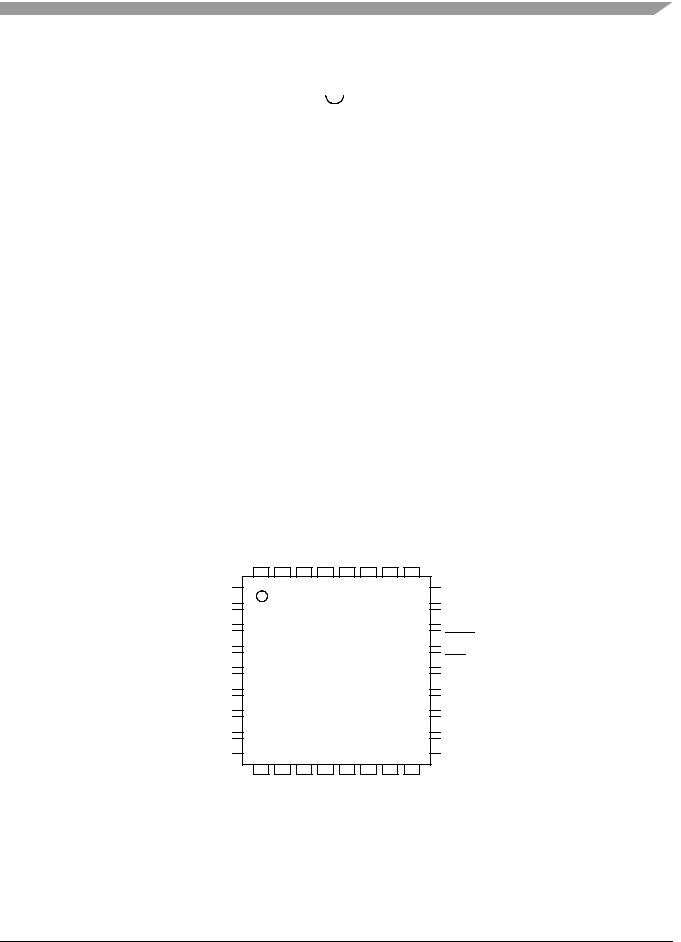
•Plastic 32-pin quad flat pack (QFP)
Table 1. Ordering Information
Device |
Operating |
Package |
|
Temperature Range |
|||
|
|
||
|
|
|
|
MC3PHACVP |
–40°C to +105°C |
Plastic 28-pin DIP |
|
|
|
|
|
MC3PHACVDW |
–40°C to +105°C |
Plastic 28-pin SOIC |
|
|
|
|
|
MC3PHACVFA |
–40°C to +105°C |
Plastic 32-pin QFP |
|
|
|
|
MC3PHAC Monolithic Intelligent Motor Controller, Rev. 2
2 |
Freescale Semiconductor |
Overview
See Figure 2 and Figure 3 for the pin connections.
|
VREF |
|
1 |
28 |
|
|
DC_BUS |
|||
|
|
|
|
|||||||
|
|
|
|
2 |
27 |
|
|
ACCEL |
||
|
RESET |
|
|
|
|
|||||
|
VDDA |
|
3 |
26 |
|
|
SPEED |
|||
|
|
|
|
|||||||
|
VSSA |
|
4 |
25 |
|
|
MUX_IN |
|||
|
|
|
|
|||||||
|
|
|
|
5 |
24 |
|
|
|
|
|
|
OSC2 |
|
|
|
START |
|
||||
|
|
|
|
6 |
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
OSC1 |
|
|
|
FWD |
|
|
|||
PLLCAP |
|
7 |
22 |
|
|
VSS |
||||
|
|
|
||||||||
|
|
|
||||||||
PWMPOL_BASEFREQ |
|
8 |
21 |
|
|
VDD |
||||
|
|
|
||||||||
PWM_U_TOP |
|
9 |
20 |
|
|
VBOOST_MODE |
||||
|
|
|
||||||||
PWM_U_BOT |
|
10 |
19 |
|
|
DT_FAULTOUT |
||||
|
|
|
||||||||
|
|
|
||||||||
PWM_V_TOP |
|
11 |
18 |
|
|
RBRAKE |
||||
|
|
|
||||||||
|
|
|
||||||||
PWM_V_BOT |
|
12 |
17 |
|
|
RETRY_TxD |
||||
|
|
|
||||||||
|
|
|
||||||||
PWM_W_TOP |
|
13 |
16 |
|
|
PWMFREQ_RxD |
||||
|
|
|
||||||||
|
|
|
||||||||
PWM_W_BOT |
|
14 |
15 |
|
|
FAULTIN |
||||
|
|
|
||||||||
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure 2. Pin Connections for PDIP and SOIC
V |
|
RESET |
V |
V |
V |
V |
BUSDC |
ACCEL |
|
||||||||
DDA |
|
|
REF |
SS |
SS |
SS |
|
|
|
|
|
|
|
|
|
|
|
VSSA 
 1
1
OSC2 
 2
2
OSC1 
 3
3
PLLCAP 
 4 PWMPOL_BASEFREQ
4 PWMPOL_BASEFREQ 
 5 PWM_U_TOP
5 PWM_U_TOP 
 6 PWM_U_BOT
6 PWM_U_BOT 
 7 PWM_V_TOP
7 PWM_V_TOP 
 8
8
32 |
31 |
30 |
29 |
28 |
27 |
26 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
25
16
24 
 SPEED
SPEED
23 
 MUX_IN
MUX_IN
22 
 START
START
21 
 FWD
FWD
20 
 VSS
VSS
19 
 VDD
VDD
18 
 VBOOST_MODE
VBOOST_MODE
17 
 DT_FAULTOUT
DT_FAULTOUT
PWMV BOT |
PWMW TOP |
PWMW BOT |
FAULTIN |
V |
PWMFREQRxD |
RETRYTxD |
RBRAKE |
|
|
|
|
SS |
|
|
|
Figure 3. Pin Connections for QFP
MC3PHAC Monolithic Intelligent Motor Controller, Rev. 2
Freescale Semiconductor |
3 |