

Министерство образования и наук Российской Федерации
Государственное образовательное учреждение высшего
профессионального образования
«Ярославский государственный технический университет»
Кафедра «СДМ»
Курсовая работа защищена
с оценкой ___________
Руководитель
_________Е.К.Чабуткин
Проектирование и расчет лабораторного стенда с установленным на нём вибратором
Расчетно-пояснительная записка к курсовой работе
ЯГТУ 190205.65 КР
Работу выполнил:
студент гр. АСДМ-47
_________ А.В.Зимин
2011
Содержание
Введение_______________________________________________________3
1.Обзор существующих конструкций_______________________________4
1.1 Классификация и принципы устройства глубинных вибраторов______4
1.2. Расчёт глубинных вибраторов__________________________________33
2. Патентный обзор______________________________________________40
2.1. Патентный обзор глубинных вибраторов________________________40
3. Расчет основных элементов стенда_______________________________42
3.1. Выбор каната____________________________________________ 42
3.2. Подбор двигателя_________________________________________45
4.Заключение___________________________________________________46
5.Список использованной литературы_____________________________________________________47
Введение
Глубинные вибраторы предназначены для уплотнения бетонных смесей при укладке их в монолитные конструкции. Также используются при изготовлении бетонных и железобетонных изделий для сборного строительства.
Основным преимуществом глубинного вибрирования является возможность уплотнять бетонную смесь с меньшим содержанием воды, что увеличивает прочность бетона, повышает его водонепроницаемость, морозостойкость, износостойкость и снижает время затвердевания. Такое вибрирование улучшает сцепление бетона со стальной арматурой и в швах между свежими и затвердевшими слоями бетона.
Данная работа предназначена для получения теоретических знаний и практических навыков по исследованию стенда глубинных вибраторов и разработки его наилучшей конструкции.
1. Обзор существующих конструкций
1.1 КЛАССИФИКАЦИЯ И ПРИНЦИПЫ УСТРОЙСТВА ГЛУБИННЫХ ВИБРАТОРОВ
На рис.1 приведена классификация существующих глубинных вибраторов для уплотнения бетона.
По характеру выполняемой работы глубинные вибраторы могут быть подразделены на ручные и подвесные.
В массовом масштабе выпускаются ручные вибраторы, рассчитанные по весу на обслуживание одним и гораздо реже двумя бетонщиками.
Подвесные вибраторы применяются в одиночном исполнении или в виде пакетов от 3—4 до 15 шт. в каждом.
Подвесные вибраторы выпускаются исключительно с приводом от электродвигателя, который либо выносится в верхнюю часть вибратора, либо встраивается непосредственно в его корпус.
В зависимости от вида привода ручные глубинные вибраторы можно подразделить на электромеханические с приводом от электродвигателя (в большинстве случаев трехфазного асинхронного короткозамкнутым ротором), пневматические, с приводом от двигателя внутреннего сгорания и гидравлические.
Электромеханические ручные вибраторы в зависимости от расположения электродвигателя изготовляются с вынесенным электродвигателем и гибким валом, соединяющим двигатель с рабочим вибронаконечником, или с электродвигателем, встроенным непосредственно в рабочую часть корпуса вибратора.
Самым распространенным типом глубинных вибраторов остаются вибраторы с гибким валом. Их важными преимуществами являются:
а) облегчение работы благодаря тому, что приходится удерживать на весу не весь вибратор, а только вибронаконечник небольшого веса;
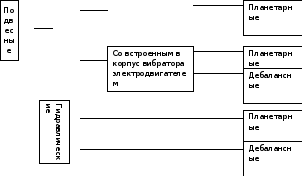
Глубинные вибраторы
Электромеханические
С электродвигателем,
вынесенным в верх-
нюю часть вибратора
С приводом от двигателя внутреннего сгорания
Со встроенным в корпус вибратора высокочастотным электродвигателем и промежуточным генератором
С поводковым бегунком
Дебалансные
С гибким валом
Планетарные
Дебалансные
Ручные
Пневматические
Планетарные
Дебалансные
С электродвигателем, вынесенным в верхнюю часть вибратора
Планетарные
Электромеханические
С поводковым бегунком
Со встроенным в корпус вибратора высокочастотным электродвигателем
Дебалансные
С вынесенным электродвигателем и гибким валом
Планетарные
Дебалансные
Рисунок 1. Классификация глубинных вибраторов
б) высокая маневренность;
в) возможность использования планетарных вибровозбудителей, позволяющих получать сложные колебания высокой частоты без использования дорогих и сложных по конструкции преобразователей частоты или мультипликаторов.
Вибраторы с гибким валом выпускаются, как правило, диаметром не более 75—80 мм, ибо при дальнейшем увеличении диаметра и мощности вибронаконечника гибкий вал становится столь громоздким и тяжелым, что работать вибратором оказывается затруднительно.
Значительная часть ручных глубинных вибраторов изготавливается со встроенным в корпус вибратора высокочастотным электродвигателем. У этих вибраторов отсутствует гибкий вал, являющийся одним из наиболее уязвимых узлов существующих глубинных вибраторов. Работая таким вибратором, рабочий удерживает его за гасящий вибрацию наружный резиновый шланг, внутри которого проходит питающий электродвигатель кабель, или за амортизированную рукоятку, благодаря чему на руки рабочего передается значительно меньшая вибрация, чем при работе вибратором с гибким валом. Вибраторы со встроенным электродвигателем компактны, в них отсутствуют какие-либо механические передачи между электродвигателем и возбудителем колебаний, что значительно снижает внутренние вредные потери энергии.
Основным недостатком вибраторов со встроенным высокочастотным электродвигателем является необходимость их комплектации специальным преобразователем частоты на 200 или 150 гц, по весу и стоимости в несколько раз превосходящим сами вибромеханизмы.
Преимуществом вибраторов с двигателем внутреннего сгорания (бензиновым или дизельным) является автономность питания. Они применяются на объектах, где нет электроэнергии. В России вибраторы с приводом от двигателя внутреннего сгорания не получили применения, но за рубежом этот тип вибратора распространен довольно широко.
В последнее время все шире применяют пневматические планетарные вибраторы, отличающиеся компактностью, малым весом, простотой конструкции и обслуживания, высокой маневренностью, большой надежностью и долговечностью работы, возможностью получения высокой частоты колебаний и ее регулирования, взрыво- и электробезопасностью. Пневматические вибраторы незаменимы в шахтах, рудниках, метро, химическом производстве и тому подобных условиях, в которых возможны взрывы и велика опасность поражения обслуживающего персонала электрическим током.
Недостатками этих вибраторов являются высокая энергоемкость, необходимость иметь для питания сеть сжатого воздуха или передвижные компрессорные установки, неустойчивость работы при отрицательных температурах и повышенный шум.
Перспективным оборудованием являются гидравлические вибраторы. Обладая всеми преимуществами пневматических инструментов, они гораздо менее энергоемки, так как к. п. д. у них значительно выше. В связи с общим быстрым развитием гидропривода сейчас создаются возможности для использования его и в глубинных вибраторах.
По принципу действия все глубинные вибраторы, независимо от привода, делятся на дебалансные с вибровозбудителем в виде дебаланса, вращающегося в подшипниках качения, и планетарные, в которых колебания создаются тяжелым элементом — бегунком, планетарно обкатывающимся по беговой дорожке, закрепленной в корпусе вибратора.
К достоинствам дебалансных вибраторов относятся простота изготовления и эксплуатации, удобство обслуживания и ремонта. Однако с ростом частоты колебаний для получения требуемых параметров в высокочастотных вибраторах пришлось применять зубчатые мультипликаторы или же электродвигатели повышенной частоты, питаемые от специальных преобразователей, что обусловило удорожание вибратора и усложнило его эксплуатацию.
Главная же проблема заключалась в том, что с увеличением частоты колебаний и скоростей вращения резко снизилась долговечность подшипников. В этих условиях подшипники качения обычного исполнения, смазываемые обычной консистентной смазкой, оказались недостаточно работоспособными, причем в первую очередь под воздействием больших инерционных нагрузок выходили из строя сепараторы подшипников.
Для решения данной проблемы могут быть использованы различные пути. Самым простым из них является спаривание подшипников на каждом конце дебалансного вала. Однако при этом оба подшипника никогда не работают в одинаковых условиях. Основную нагрузку воспринимает на себя один из подшипников пары, который быстрее изнашивается, после чего всю нагрузку воспринимает второй подшипник.
Другое решение заключается в том, что дебаланс делят на несколько элементов, каждый из которых опирается на свои подшипники. Дебалансный вал выполняется разрезным с эластичными соединительными муфтами. Подшипники в этом случае оказываются достаточно долговечными, но конструкция вибратора усложняется, повышаются и требования к точности его изготовления.
Применение специальных высокооборотных виброустойчивых подшипников с повышенным радиальным зазором и монолитным, сепаратором из цветного металла, смазываемых жидкой или содержащей антифрикционные добавки специальной консистентной смазкой, обеспечивает достаточную долговечность подшипниковых узлов современных вибраторов при частоте до 9000—12000 кол/мин. Дальнейшее повышение частоты колебаний на базе дебалансного вибровозбудителя оказывается нерациональным.
Другим недостатком дебалансных вибраторов является невозможность практически получать с их помощью сложные поличастотные колебания.
В отличие от дебалансных систем, планетарные вибраторы позволяют исключительно просто получать сложные высокочастотные колебания.
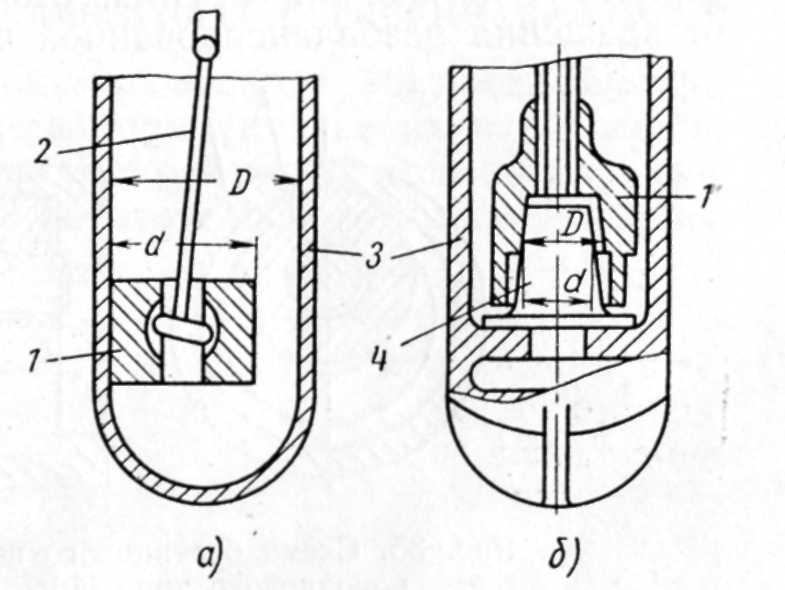
1- бегунок; 2 — приводной вал; 3 — корпус вибратора;
4 — сердечник
Рисунок 2. Принципиальные схемы планетарного вибрационного механизма с наружной (а) и внутренней (б) обкаткой бегунка.
На рис. 2 приведены принципиальные схемы планетарного-вибрационного механизма с наружной и внутренней обкаткой бегунка. В первом случае число колебаний в минуту определяется зависимостью
 (1)
(1)
во втором
 (2)
(2)
где n- число оборотов приводного вала в минуту;
d,D- диаметры поверхностей обкатки.
Из приведенных формул видно, что планетарные вибраторы позволяют получать высокие частоты колебаний без применения преобразователей частоты или мультипликаторов, причем получаемая частота колебаний зависит от числа оборотов двигателя и соотношения диаметров бегунка и беговой дорожки.
Получение сложных двухчастотных колебаний в планетарных вибраторах достигается путем применения в их конструкции неуравновешенных относительно своей геометрической оси (разбалансированных) бегунков. Высокая частота получается от планетарного обкатывания бегунка, вторая низкая частота возникает от вращения разбалансированной части бегунка вокруг его оси.
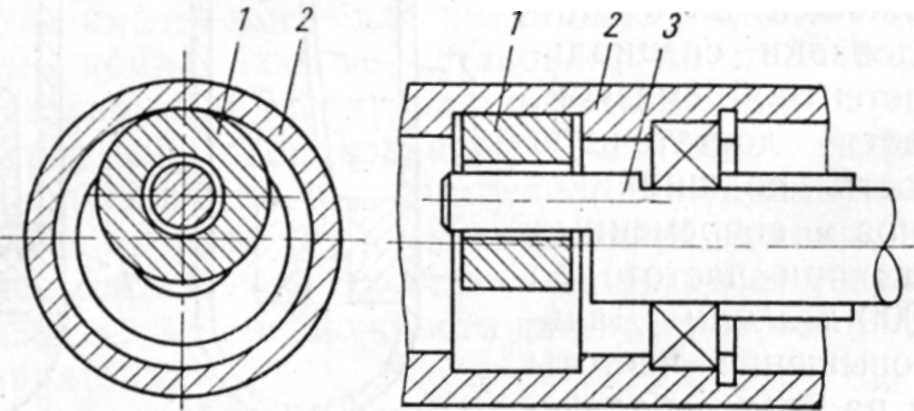
1 — бегунок; 2 — беговая дорожка (корпус вибратора);
3 — поводок (приводной вал)
Рисунок 3. Схема бегункового вибратора IRFЕМ 1у/42 поводкового типа (ФРГ, фирма «Вакер»).
Неуравновешенная масса легко может быть расположена так, что ее центр тяжести будет совпадать по высоте с точкой приложения равнодействующей центробежных сил бегунка, вследствие чего вибратор будет иметь нулевую точку, что позволяет обеспечить надлежащую виброизоляцию рукояток.
Планетарные системы дают возможность создавать виброударный режим, в ряде случаев повышающий эффективность работы. Для получения частых ударных импульсов беговая дорожка или бегунок выполняются в виде многогранника, благодаря чему плавное движение бегунка перемежается с возникающими ударами. Вибраторы с многогранными беговой дорожкой или бегунком более трудоемки в изготовлении. Кроме того, такая планетарная пара менее долговечна. Виброударные планетарные системы пока не нашли промышленного применения.
В ФРГ фирмой Вакер разработана и практически осуществлена конструкция электромеханического глубинного вибратора с поводковым бегунком (рис. 3). Преимущество такого вибратора заключается в том, что обкатка здесь совершается не по коническим, а по цилиндрическим поверхностям. Это позволяет создать на базе механизма с поводковым бегунком вибратор со встроенным в его корпус высокочастотным электродвигателем. В существующих же конструкциях бегунковых вибраторов планетарного типа обкатка совершается по коническим поверхностям, что делает неизбежным наличие в них бегунковой штанги, препятствующей встраиванию электродвигателя в корпус вибратора.
В бегунковых вибраторах поводкового типа, как и в планетарных системах, отсутствуют высоконагруженные подшипники, а возникающая при обкатке вынуждающая сила воспринимается непосредственно поверхностями обкатки.