

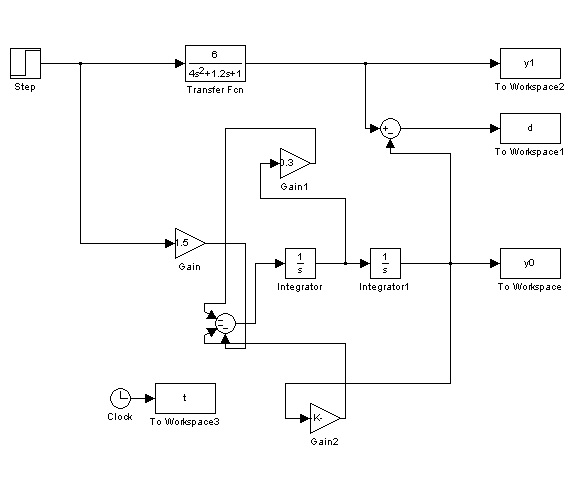
Схема модели:
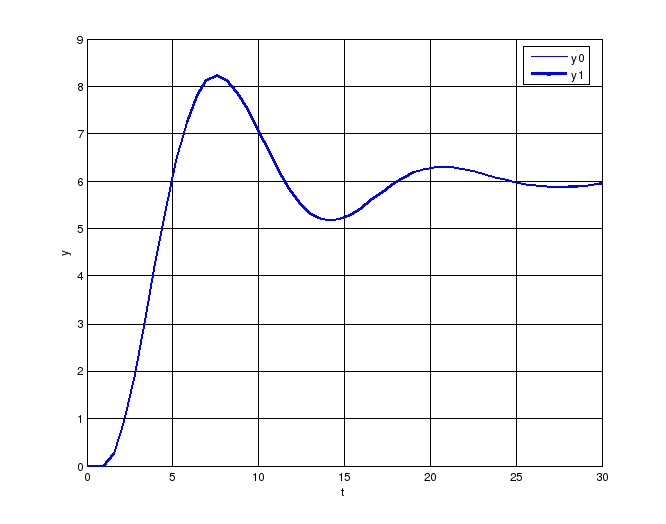
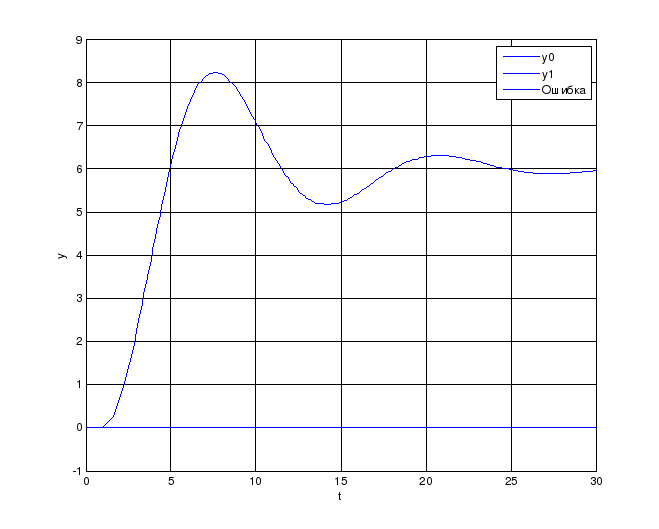
Графики переходных процессов для переменных состояния объекта и наблюдателя, а также ошибка ∆(t).

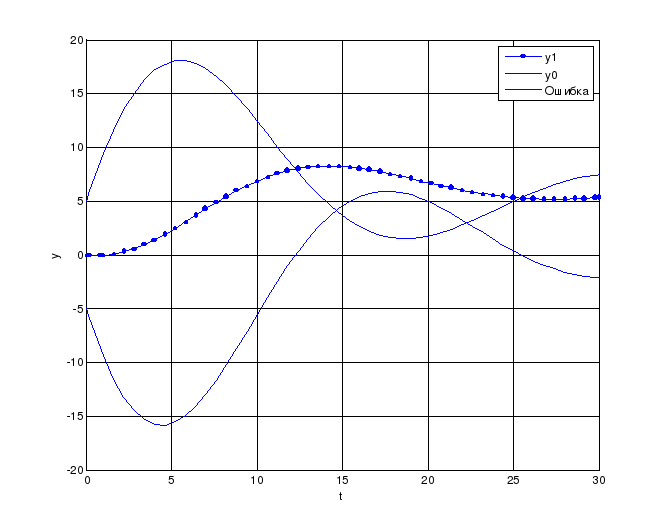
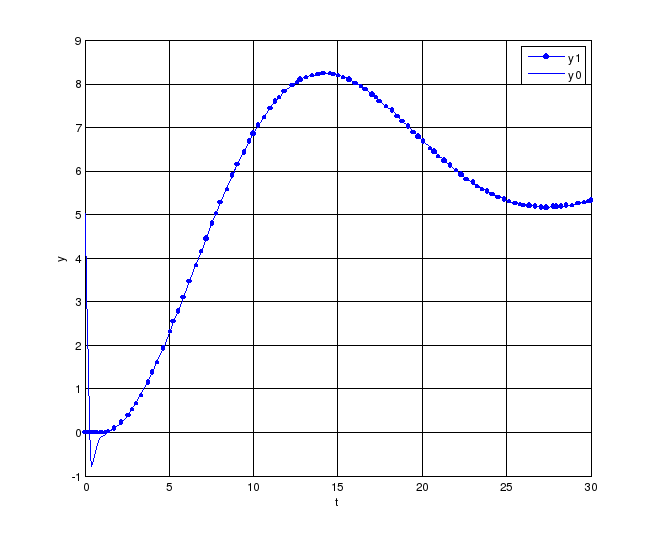
Аналогичное моделирование при ненулевых начальных условиях y(0) = 5, y'(0) = 5:

Моделирование при изменении величины Т в два раза(ненулевые начальные условия):
Фильтр Калмана
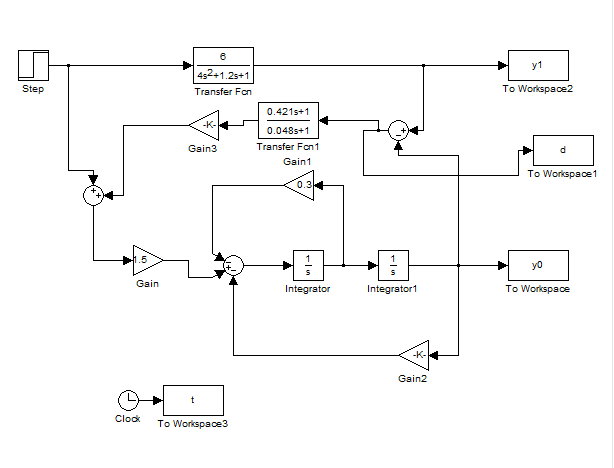
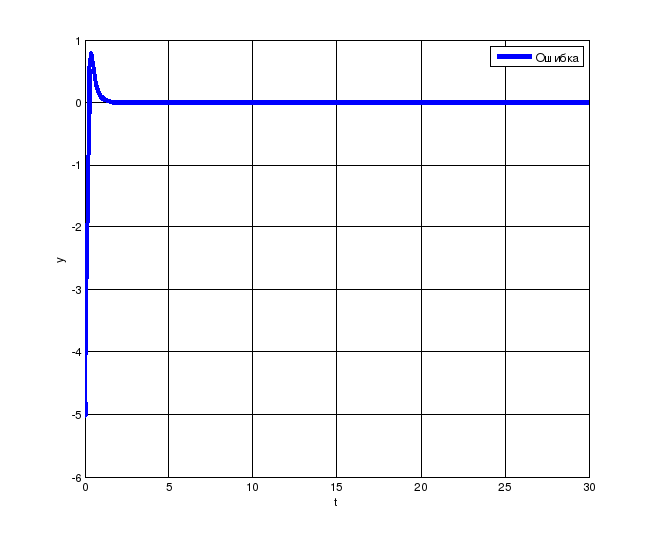
Модель с фильтром Калмана и стабилизирующей добавкой L(p) = К1. Определено экспериментальным методом К1 = ?????. График ошибки:
Модель с фильтром Калмана и ![]()
Расчёт параметров фильтра Калмана:
η=5 β=0
λ1=-6 λ2=-7 λ3=-8
C1=7 C2=146 С3 = 336
k2 = 51.7
τ2=0.048 τ1=0.421
Схема модели:
Графики переходных процессов системы с фильтром Калмана и стабилизирующей добавкой L(p), а также ошибка ∆(t).
Аналогичное моделирование при ненулевых начальных условиях y(0) = 5, y'(0) = 5:


Моделирование при изменении величины Т в два раза(ненулевые начальные условия):
 ]
]
Вывод: ошибка регулирования появляется
при ненулевых начальных условиях.
Параллельная модель при разных начальных
условиях у объекта и наблюдателя даёт
медленный переходный процесс. С
увеличением постоянной времени объекта
увеличивается и максимальное значение,
которого достигает ошибка регулирования.
Фильтр Калмана и стабилизирующая добавка
в виде пропорционального звена дают
значительно более быстрый процесс и
просты в моделировании. Однако это
требует очень высоких значений
коэффициента пропорционального звена,
что усложняет его практическую реализацию.
Стабилизирующая добавка ![]() обеспечивает быстрый переходный процесс,
требует дополнительных расчётов, но в
результате довольно проста для реализации.
обеспечивает быстрый переходный процесс,
требует дополнительных расчётов, но в
результате довольно проста для реализации.