

II курс - курсовые / Колебания маятника переменной длины / колебания маятника с переменной длиной
.docМосковский государственный университет имени М. В. Ломоносова физический факультет
Колебания маятника с переменной длиной
Курсовая работа по курсу “Компьютерные методы физики” Студента *** группы ***
Преподаватель: ***
Москва, 2004 г.
Задание
Выполнить компьютерное моделирование колебаний маятника с изменяющейся по гармоническому закону длиной. Рассмотреть предельные случаи и общий случай. Продемонстрировать графики траектории и фазового портрета для каждого из рассматриваемых случаев.
Введение.
Рассматривается модель математического маятника. Нить нерастяжима и невесома.
Ускорение свободного падения постоянно и равно g=9,8. На маятник не действуют другие тела, кроме Земли.
Теория.
Рассмотрим основные закономерности собственных колебаний математического маятника с переменной длиной. Пусть в начальный момент длина маятника L=30, координата x=0 и скорость v=0 (все уравнения написаны в системе СИ).
Пусть, далее, частота изменения длины маятника равна 1 радиан в секунду. Длину в конкретный момент времени обозначим как l1. Тогда длина маятника будет изменяться по закону:
l1=L*(2+cos(1*t+)),
где t-время в секундах,
-начальная фаза изменения длины в радианах.
Обозначим мгновенную частоту колебаний маятника за 2. Ее можно вычислить, пользуясь формулой Томпсона:
![]() ,
,
откуда
![]()
При постоянной длине маятника колебания маятника будут происходить по закону:
![]() ,
,
где X-амплитуда колебаний,
-декремент затухания.
Добавим в это уравнение член, соответствующий изменению длины маятника, который можно легко получить из геометрических соображений:
![]()
Получим:
![]()
Эти колебания не являются периодическими,
однако условно периодом таких колебаний
считается T=2π/![]() 2.
2.
При увеличении трения период колебания увеличивается. При большом трении движение вообще перестает быть колебательным, принимая вид экспоненциальной функции.
[рис. 1]
Численные методы.
Представим колебания данного маятника в виде задачи Коши:
![]() ,
,
где
![]() ,
,
![]()
Выберем на отрезке [,X]
некоторую сетку {xn,
![]() }
значений аргумента так, чтобы
}
значений аргумента так, чтобы![]() .
Разлагая решение u(x)
по Тейлору на интервале сетки
.
Разлагая решение u(x)
по Тейлору на интервале сетки
![]() и обозначая
и обозначая
![]() ,
получим
,
получим
 ,
(1)
,
(1)
где
![]()
Ограничась первым членом разложения, получим схему ломаных:
![]()
![]() (2)
(2)
При такой замене можно найти только
приближенные значения функции в узлах.
Будем обозначать эти значения через
![]() в
отличие от точных значений
в
отличие от точных значений
![]() .
Для численного расчета по схеме ломаных
достаточно задать начальное значение
.
Для численного расчета по схеме ломаных
достаточно задать начальное значение
![]() .
Затем по формуле (2) последовательно
вычисляем величины
.
Затем по формуле (2) последовательно
вычисляем величины
![]() .
.
Полагаем
![]() непрерывной и ограниченной вместе со
своими производными:
непрерывной и ограниченной вместе со
своими производными:
![]() ,
,
откуда
![]() .
.
Обозначим ошибку на n-ном
шаге
![]() .
.
Вычитая из (1) (01) получим
![]() (3)
(3)
Погрешность на произвольном шаге

При малых шагах сетки
 ,
,
причем в качестве верхнего предела
можно взять
![]() ,
т.к. ошибка при этом остается в пределах
общей точности преобразований.
,
т.к. ошибка при этом остается в пределах
общей точности преобразований.
Аналогично преобразуя второй член, получим
 ,
,
где h(x) – непрерывная функция, дающая
в каждом узле xn величину шага hn.
Чтобы найти положение маятника в любой момент времени, применим метод Эйлера [2] для нахождения решения
где d – шаг сетки. Метод Эйлера основан на замене производной разностным отношением по приближенной формуле
![]()
Δx/Δt= f(t,x),
где
Δx= x(t + d)-x(t), Δt=(t +d) – t.
Приближенные значения yk в точках xk=x0 + kh вычисляются по формуле
xk+1=xk + hf(t,x) (k=0,1,2,3,…,n)
Применим данный метод для вычисления положения маятника. Пусть в начальный момент времени t0=0. Пусть при t0 =0 маятник находился на расстоянии X от положения равновесия: х0 = X. Тогда через интервал времени d маятник будет находиться в точке
![]()
Положив шаг равным 0.01, мы получим достаточную степень точности для данных условий (X=10, =0,05).
Формулы, использованные в этом разделе, взяты из [2], с. 244.
Результаты.
Рассмотрим случай, когда трение среды, в которой колеблется маятник равно нулю и его длина не изменяется. Тогда видно, что маятник будет совершать обыкновенные гармонические колебания.
[рис. 1]
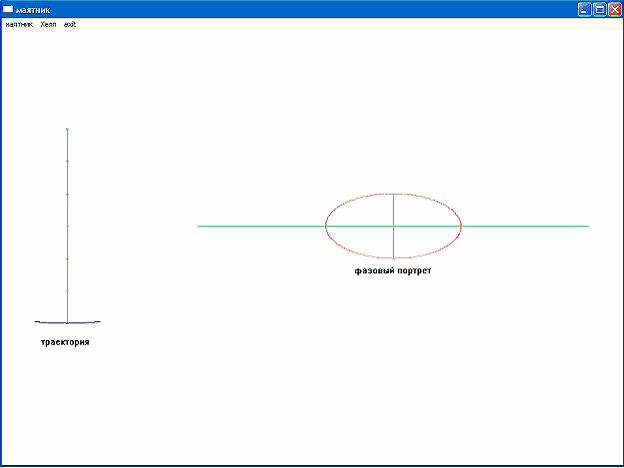
Пусть теперь длина маятника начнет изменяться, а затухание остается равным 0. Тогда координата у будет зависеть не только от 2, но и от 1:
[рис. 2]
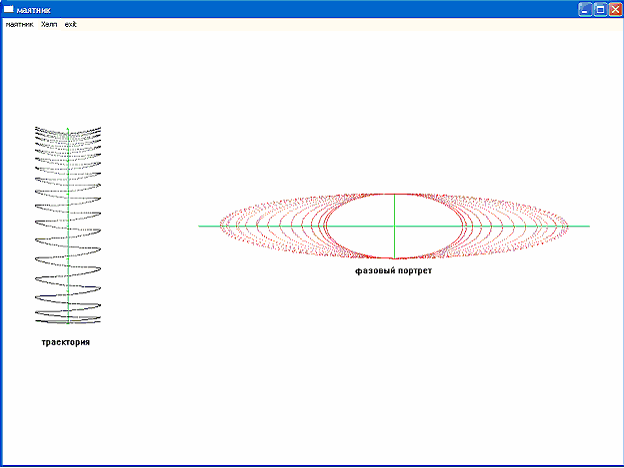
(Частота изменения длины 1=0,1)
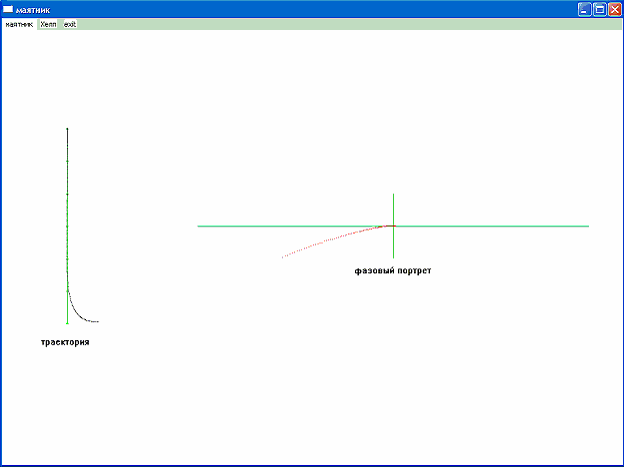
Теперь рассмотрим наиболее общий случай: присутствует трение и изменяется длина и, соответственно, частота колебаний маятника. Амплитуда колебаний будет ограничена экспонентой, характеризующей затухание:
[рис3]
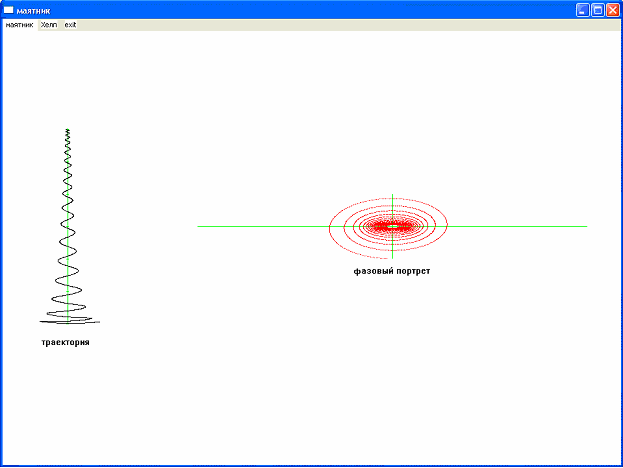
(=0,1; 1=0,1)
Оставим условия предыдущего опыта, но увеличим частоту изменения длины маятника:
[рис 4]

(=0,1; 1=0,5)
Как видно из рисунков, результаты вполне совпадают с ожидаемыми, что подтверждает правильность сделанных расчетов.
Литература.
-
Матвеев А.Н. Механика и теория относительности. М.: Высш. шк. 1986.
-
Калиткин Н.Н. Численные методы: учебное пособие для студентов. М.: Наука, 1978.