

2.2 Фазовые радиодальномеры
Измерение дальности радиотехническими методами, как известно, основывается на измерении временной задержки радиосигнала t3 при распространении его на расстояние R, которая вследствие постоянства скорости распространения радиоволн в свободном пространстве оказывается пропорциональной измеряемой дальности R. При этом в радиодальномерах используется либо непосредственное измерение временного интервала, либо фаза или частота, являющиеся функциями времени и позволяющие моделировать время в соответствующем масштабе. В зависимости от этого различают временные (импульсные), фазовые и частотные методы дальнометрии.
Сигналы, используемые для измерения дальности, могут быть модулированными и немодулированными, т. е. измерения могут выполняться на несущей частоте, частоте модуляции и частоте биений излучаемых и принимаемых сигналов.
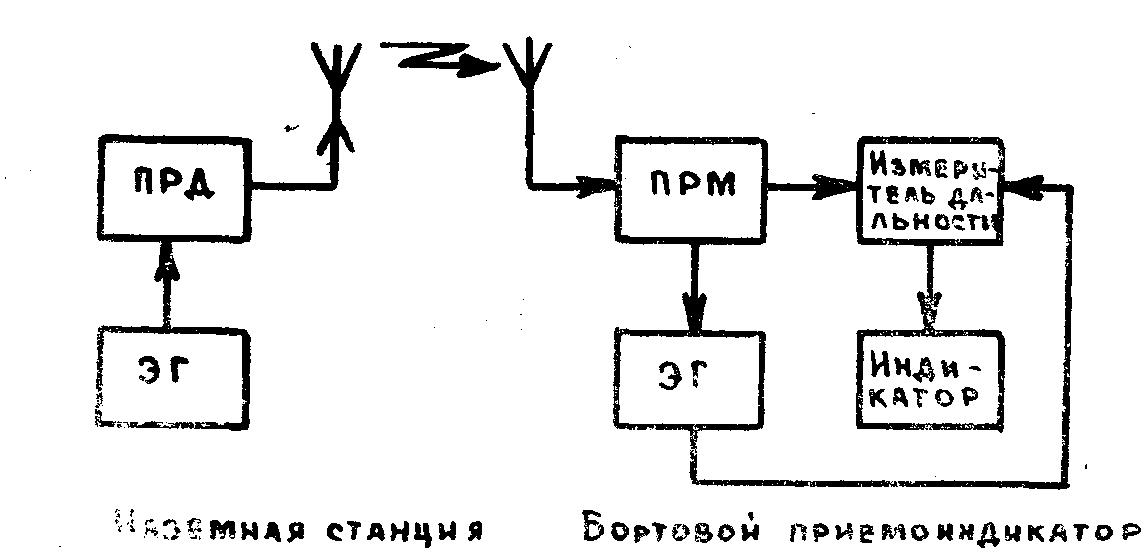
Рис. 3. Радиодальномер без запроса
Фазовые радионавигационные дальномеры в силу своих особенностей находят применение в основном в системах космической радионавигации.
По принципу измерения дальности радионавигационные дальномеры делятся на радиодальномеры без ответчика и радиодальномеры с ответчиком. Частным видом радионавигационных дальномеров, как уже указывалось, являются радиовысотомеры.
В радионавигационных дальномерах без ответчика измеряется время распространения сигнала, излучаемого наземной станцией, до ЛА, на борту которого установлено приемоиндикаторное устройство. Обобщенная структурная схема радионавигационного дальномера представлена на рис. 3. В составе наземной станции и бортового приемоиндикатора имеются высокостабильные эталонные генераторы (ЭГ), которые перед вылетом синхронизируются между собой специальным сигналом синхронизации, излучаемым наземной станцией.
По принятому сигналу на борту ЛА измеряется или интервал времени tR = R/C между опорным импульсом и импульсом на выходе приемника (при импульсном характере излучения наземной станции), или разность фаз Δφ между напряжением бортового эталонного генератора и выходным напряжением приемника (при непрерывном или квазинепрерывном излучении наземной станции). Измеряемая дальность определяется выражением
![]() (4)
(4)
где С —скорость распространения радиоволн;
ωср— частота сравнения, на которой осуществляется измерение разности фаз.
Как следует из выражений (1), погрешность измерения дальности:
![]() (5)
(5)
Величина δφ в основном зависит от нестабильности частоты эталонного генератора.
Особенностью фазометра является возможность однозначного измерения фазовых сдвигов между двумя колебаниями в пределах одного фазового цикла Δφ = 0÷2π, что приводит к тому, что в соответствии с выражением (4) расстояние однозначно будет измеряться в пределах Додн=0÷λ0. При дальнейшем увеличении расстояния показания фазометра будут повторяться. Таким образом, максимальное расстояние, которое может быть измерено однозначно рассматриваемым методом, равно длине волны излучаемых колебаний λ0.
Устранение многозначности отсчета в фазовых дальномерах осуществляется обычно следующими методами:
использованием в индикаторах дальности счетчиков полных фазовых циклов; при этом необходимо предварительно «привязать» показания индикатора к ориентиру на местности, производя от него последующий отсчет дальности;
использованием предварительной информации о расстоянии, полученной путем счисления пути или другим способом; в этом случае погрешность счисления должна быть меньше половины ширины фазовой дорожки;
излучением двух или более рабочих частот, т. е. изменением масштаба измерения дальности; в этом случае для правильного определения дальности необходимо, чтобы период более низкой масштабной частоты был больше величины 2Rmax/C, а период каждой последующей более высокой частоты был больше возможной погрешности запаздывания сигнала, возникающей при измерении на предшествующей, более низкой масштабной частоте. Этот способ ликвидации многозначности отсчетов требует расширения диапазона рабочих частот дальномера, что не всегда возможно.
Таким образом, несмотря на сравнительную простоту реализации рассмотренной схемы дальномера с измерением на несущей частоте и его практически неограниченную пропускную способность, присущий дальномеру недостаток (многозначность измерения дальности) снижает его достоинства и создает известные трудности при его использовании.
В качестве примера практической реализации радиодальномера без ответчика, использующего фазовый метод измерения дальности, можно назвать американскую длинноволновую систему типа «Наваро».
Рассмотрим принцип действия и особенности фазового радиодальномера с ответчиком, упрощенная структурная схема которого представлена на рис. 5.1

Рис. 4. Фазовый хронометр с ответчиком
Генератор модулирующих колебаний запросчика вырабатывает низкочастотные колебания. Эти колебания используются для амплитудной модуляции колебаний передатчика запросчика, который формирует запросный сигнал в виде АМ-колебания на несущей частоте ω1:
Запросный сигнал излучается антенной А1 передатчика запросчика, принимается антенной А2 приемника ответчика (ретранслятора), удаленного от запросчика на расстояние Д, обрабатывается в приемнике, детектируется, и выделенная огибающая запросного сигнала используется в ретрансляторе для амплитудной модуляции колебаний передатчика ретранслятора.
Колебания передатчика ретранслятора, представляющие собой ответный сигнал, излучаются антенной A3 на частоте ответа ω2.
Антенной А4 приемника запросчика принимается ответный сигнал, задержанный на время t3.
Сигнал с выхода приемника запросчика подается на фазометр, на второй вход которого подается модулирующее колебание (4) с текущей фазой. В фазометре измеряется разность фаз этих двух колебаний:
Δφ=φм(t)-φc(t)= fм 2Д/C (6)
Из последнего выражения видно, что измеренная фазометром разность фаз Δφ пропорциональна расстоянию между запросчиком и ретранслятором, что позволяет по измеренной разности фаз определить расстояние в соответствии с выражением
Д=C/2fмΔφ или Д=λм/4πΔφ (7)
где λм— C/fM — длина волны модулирующих колебаний.
Поскольку модулирующая частота может быть выбрана достаточно малой (по сравнению с несущей частотой), достоинством рассматриваемого дальномера является возможность однозначного определения больших расстояний. Однако точность измерения в этом случае снижается, так как погрешность измерения дальности (например, среднеквадратичная σД) с учетом формулы (5.3) запишется в виде
σД=λмσφ/4π (8)
где σφ — среднеквадратичная погрешность измерения фазовых сдвигов, которая обычно слабо зависит от λм.
Из выражения (5.4) следует, что увеличение масштаба измеряемого расстояния (и соответствующей длины волны λм) достигается за счет проигрыша в точности измерений.
Для разрешения указанных противоречий, свойственных всем фазовым радиодальномерам, используют несколько масштабных модулирующих частот (сетку частот), что легче обеспечить, чем создать масштабную сетку несущих колебаний.
При использовании сетки модулирующих (масштабных) частот дальность отсчитывается многошкальным методом. Вводят точную и грубую шкалу.
Некоторое усложнение устройств измерения и индикации дальности в многошкальных радиодальномерах, использующих для измерения фазовых сдвигов модулирующие частоты, окупается несомненными достоинствами этих систем, обладающих высокой точностью и однозначностью отсчета дальности.
Фазовым дальномером с модуляцией сигналов является дальномерный канал одного из вариантов спутниковой радионавигационной системы «Timation» (США), работающей в диапазоне несущих частот 150—400 МГц, амплитудно-модулированных низкими частотами 0,1; 0,3; 1,3; 10; 30; 100 кГц.
Необходимо также указать на отсутствие у фазовых дальномеров разрешающей способности по дальности. При одновременном поступлении на вход приемника фазового дальномера нескольких сигналов они будут интерферировать и дадут результирующий сигнал, фазовый сдвиг которого не несет информации о дальности до объектов. Поэтому фазовые радиодальномеры целесообразно использовать в тех случаях, когда заведомо известно, что источником дальномерной информации является лишь один объект. В силу указанных причин фазовые дальномеры нашли широкое применение в космической радионавигации, а также при измерении параметров орбит искусственных спутников Земли.
Частотный метод определения дальности
Частота отраженного сигнала не зависит от дальности. Поэтому необходимо осуществить модуляцию зондирующего сигнала, чтобы его частота была явной функцией времени.
Следовательно, частотный метод основан на использовании частотной модуляции зондирующего сигнала и сравнении частот отраженного и зондирующего сигналов.
Так,
например, если частота зондирующего
сигнала изменяется линейно
![]() то отраженный сигнал, запаздывающий на
времяtД,
будет иметь
частоту
то отраженный сигнал, запаздывающий на
времяtД,
будет иметь
частоту
![]() (рис. 1, а). Сравнивая частоты зондирующего
и отраженного сигналов, можно определить
дальность до цели по величине разностной
частоты (рис. 1,б):
(рис. 1, а). Сравнивая частоты зондирующего
и отраженного сигналов, можно определить
дальность до цели по величине разностной
частоты (рис. 1,б):

Рис 5 Принцип действия дальномера с ЧМ
![]() отсюда
отсюда
![]() (9)
(9)
где а —скорость изменения частоты.
где а —скорость изменения частоты.
В частотных радиодальномерах (ЧД) используются различные виды периодической модуляции несущей частоты:
- симметричная пилообразная (см. рис.6, а);
- несимметричная пилообразная (рис.6, б);
- гармоническая (рис.6, в).

Рис. 6 Виды периодической модуляции частоты,
используемые в частотных дальномерах
Рассмотрим работу частотного дальномера по упрощенной структурной схеме частотного дальномера (рис. 7), которая, в частности, применяется в частотных радиовысотомерах (РВ), предназначенных для определения истинной высоты полета. Модулированные по частоте колебания высокочастотного генератора ЧМГ излучаются передающей антенной А1 а также подаются на вход смесителя См— схему перемножения прямого и отраженного (принимаемого антенной А2) сигналов. На выходе смесителя выделяются лишь низкочастотные колебания (сигнал биений), пропорциональные абсолютному значению разности мгновенных значений частот прямого и отраженного сигналов. Измеряется частота сигнала и подается на индикатор для измерения

Рис. 7. Упрощенная структурная схема частотного
радиодальномера (радиовысотомера)
Рассмотренный частотный метод дальнометрии используется для определения дальности или высоты до одиночного объекта. В частности, гладкую земную поверхность в первом приближении можно также считать за одиночный отражающий объект. Описанный выше принцип действия частотных дальномеров положен в основу построения частотных радиовысотомеров малых высот (например, отечественных РВ-2, РВ-УМ, РВ-3, РВ-5 и др.). Современные радиовысотомеры малых высот (с диапазоном измерения, не превышающим 1500 м) используют не только для непосредственной индикации истинной высоты полета, но также включают в автоматизированный комплекс управления заходом на посадку и посадкой самолетов.
Определение дальности частотным методом до многих объектов требует сложных многоканальных схем спектрального или временного анализа, поэтому подобный метод в радионавигации ЛА применения не нашел.