

Учебное пособие РСП-6М2
.pdf91
3.4.2. Принцип работы ПРЛ в режимах ПАСС и АКТ
Согласованный порядок работы во времени устройств и блоков ПРЛ в используемом режиме обеспечивает УСФИ (БСФ) с помощью соответствующих импульсов запуска передатчиков (ИЗ ПД), импульсов запуска индикатора (ИЗ ИКГ), задающих и стробирующих видеоимпульсов.
В режиме ПАСС последовательность импульсов ИЗ ПД ПАСС (τИ = 0,45 мкс; ТИ = 458 мкс, FИ = 2180 Гц) поступает на передатчик обзора ПД-1. При выходе из строя этого передатчика с помощью коммутатора передатчиков (КОМ. ПП) включается резервный передатчик ПД-2 (передатчик подавления). С приходом ИЗ ПД ПАСС передатчик генерируют мощные ВЧ импульсы с частотой fПД, которые через антенный переключатель АП-1, КОМ. ПП и коммутатор антенн (КОМ. АНТ.) поступают поочередно к антеннам глиссады АГ и курса АК. Антенны излучают мощные радиоимпульсы в пространство согласно своим ДНА. С помощью привода качания антенны АГ и АК сканируют соответственно в секторах 9° и 35°. Скорость сканирования – 30 качаний в минуту (одно качание в две секунды, т. е. ωАГ = 4,5°/сек, ωАК = 17,5°/сек).
Отраженные от целей (ЛА) радиосигналы принимаются антеннами АГ и АК. С их выходов антенн ВЧ импульсы через КОМ. АНТ., КОМ. ПП и АП-1 поступают в приемник ПР-1. Гетеродинный сигнал с частотой fГ для смесителя приемника подается из отдельного блока гетеродина БГТ-1. Выходной сигнал приемника ВС ПР представляет собой (в случае одной цели) пачку видеоим-
пульсов (ВИ). Пачка состоит из NИ = FИTОБЛ импульсов, где ТОБЛ
– время облучения цели (для антенны глиссады – ТОБЛ = ТОБЛГ = θАГ/ωАГ, для антенны курса – ТОБЛ = ТОБЛК = θАК/ωАК ). Видеосигнал с выхода приемника ВС ПАСС проходит на плату формирования (ПФ) в блоке УСФИ (БСФ), формируется там по величине и далее поступает в БОП или БУО (при отключенном БОП). Приемник обеспечивают максимум усиления ВЧ сигналов антенн при условии, что частота этих сигналов fС такова (в общем случае fС ≠ fПД), что разность частот fГ - fС = fПРС совпадает с частотой настройки fПР0 УПЧ приемника. Для выполнения этого условия с
92
помощью блока автоматической подстройки частоты БПАПЧ частота передатчика изменяется так, чтобы fПРС ≈ fПР0. Для этого из передатчика ПД сигнал малой мощности подается в приемник ПР. Частота ПД fпд сравнивается с частотой принятого сигнала fС и формируется сигнал рассогласования, пропорциональной частотной расстройке f = fПД0 - fС, где fПД0 – номинальное значение частоты передатчика. В блоке БПАПЧ этот сигнал преобразуется в сигнал UАПЧ, который перестраивает частоту передатчика до выполнения условия fПРС ≈ fПР0. Конечно, на точность АПЧ передатчика влияет доплеровский эффект, т. е. доплеровская частота выступает в роли неустраненной погрешности АПЧ.
Блок очистки от помех (БОП) подавляет (значительно ослабляет) видеоимпульсы НИП и ХИП, но пропускает ВИ целей. Селекция видеоимульсов целей производится по признаку постоянства их запаздывания τД относительно ИЗ ПД ПАСС в пределах длительности пачки τП = ТОБЛ (на NИ периодах). То есть, ВИ цели
будут приходить на один и тот же дискрет периода ТИ ПАСС длительностью τи, начинающийся в точке τД и заканчивающийся в
точке τД + τИ. Видеоимпульсы НИП, наоборот, все время изменяют свое временное положение от периода к периоду. Значит, если в этом дискрете периода (дальности) в течении τП обнаруживается присутствие видеоимпульсов цели от периода к периоду (например, в любых 3-х периодах из 5), то в соответствии с выбранным критерием обнаружения на выход БОП для этого дискрета дальности формируется очищенный от НИП видеосигнал (ОВС). Этот ОВС поступает в блок управления отображением. Там он формируется по величине и затем через видеоусилитель ИКГ проходит на управляющей электрод (УЭ) ЭЛТ индикатора.
Под действием пачки видеоимпульсов ОВС на экране ИКГ в секторах глиссады и курса формируются отметки целей (рис.3.3).
В обоих секторах используется прямоугольная развертка дальность - угол: (Д, θ) – в секторе глиссады и (Д, Ф) – в секторе курса. Горизонтальная развертка (перемещение) электронного луча индикатора по дальности происходит под воздействием пилообразных импульсов на отклоняющие катушки (ОКХ) индикатора. Эти импульсы развертки дальности формируется в блоке

93
БУО с частотой ИЗ ИКГ. Вертикальная развертка по углам





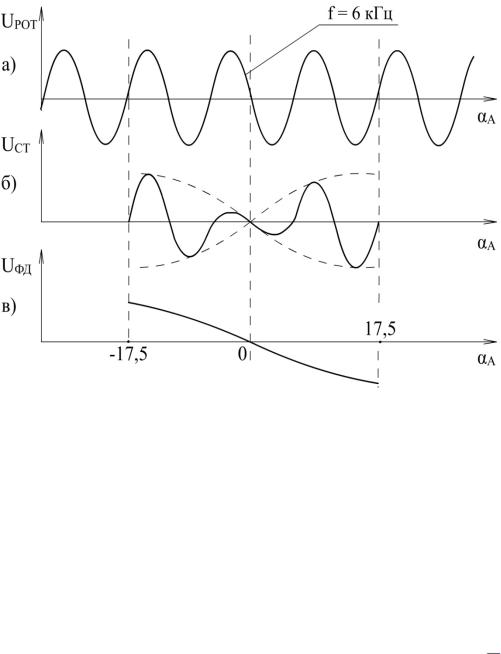
 осуществляется под воздействием напряжений секторной развертки, формируемых в БРН по сигналам сельсинов на валах качания антенн глиссады и курса. На ротор сельсина подается гармоническое напряжение с частотой 6 кГц. На выходе сельсина амплитуда напряжения зависит от угла поворота ротора (антенны) αА. Роторный UРОТ (рис.3.4, а) и статорный UСТ сигналы (рис.3.4, б) подаются на фазовый детектор (ФД), на выходе которого получается практически линейное напряжение UФД (рис.3.4, в), т.к. угол качания антенн мал. Под воздействием UФД на ОКХ индикатора развертка дальности перемещается по вертикали.
осуществляется под воздействием напряжений секторной развертки, формируемых в БРН по сигналам сельсинов на валах качания антенн глиссады и курса. На ротор сельсина подается гармоническое напряжение с частотой 6 кГц. На выходе сельсина амплитуда напряжения зависит от угла поворота ротора (антенны) αА. Роторный UРОТ (рис.3.4, а) и статорный UСТ сигналы (рис.3.4, б) подаются на фазовый детектор (ФД), на выходе которого получается практически линейное напряжение UФД (рис.3.4, в), т.к. угол качания антенн мал. Под воздействием UФД на ОКХ индикатора развертка дальности перемещается по вертикали.
Рис.3.3. Вид отображения на ИКГ
94
Рис.3.4. Формирование угловой развертки на ИКГ
Шкала дальности на индикаторе - нелинейная: первые 10 км (или 20 км в зависимости от используемого масштаба LШК) располагаются на отрезке 3LШК/4, а вторые 10 (20) км – на отрезке LШК/4. В секторах глиссады и курса указывается положение антенн АГ и АК соответственно, а также ширина их лучей θАГ и θАК. Ширина луча указывается путем увеличения яркости свечения меток дальности, следующих через 1 км на участке 0…10 км и через 5 км на участке 10…20 км. Угловые метки  10° в секторе курса и 0…7,5° в секторе глиссады представляют собой яркие горизонтальные линии. На экране индикатора отображаются также ЗЛП по курсу и глиссаде и линии равных отклонений (ЛРО), позволяющих руководителю посадки более точно оценивать по положению отметки цели (ОЦ) линейные отклонения ЛА от заданной линии планирования.
10° в секторе курса и 0…7,5° в секторе глиссады представляют собой яркие горизонтальные линии. На экране индикатора отображаются также ЗЛП по курсу и глиссаде и линии равных отклонений (ЛРО), позволяющих руководителю посадки более точно оценивать по положению отметки цели (ОЦ) линейные отклонения ЛА от заданной линии планирования.
В режиме АКТ посадочный радиолокатор работает по сути дела так же, как в режиме ПАСС. Отличие заключается в том, что ПРЛ излучает не один, а два или три зондирующих импульса в
95
зависимости от режима запроса: РСП-1; РСП-2; УВД. Передатчик ПД-1 в режиме АКТ запускается импульсами ИЗ ПД АКТ.
При включении режима работы АКТ и режима запроса РСП-1 (без подавления) ПД-1 или ПД-2 генерирует парный ВЧ импульс с кодовым интервалом 3 мкс. Для обнаружения ЛА одновременно используется отраженный от него сигнал (пара радиоимпульсов) и ответный сигнал СО (пара радиоимпульсов).
Парные отраженные радиоимпульсы принимаются антеннами АГ и АК и далее обрабатываются как в режиме ПАСС. На выходе амплитудного детектора (АД) приемника ПР-1 получаются два видеоимпульса, которые поступают в УСФИ (БСФ) и декодируются там в один видеоимпульс. Парный ответный радиоимпульс принимается антенной АО и обрабатывается в типовом супергетеродинном приемнике БПРН (НПО). С АД приемника пара ВИ поступает в УСФИ, декодируется в один ВИ и совмещается с декодированным отраженным ВИ. Получается единый видеосигнал, поступающий в БОП. Очистка единого видеосигнала от несинхронных помех в этом блоке происходит так же, как и очистка отраженных видеоимульсов в режиме ПАСС.
Врежиме запроса РСП-2 (с подавлением) работают оба передатчика. Сначала импульсами ИЗ РСП-2 запускается ПД-2. Он генерирует один высокочастотный импульс длительностью 0,9 мкс, который через АП-2 описанным выше способом поступает в
антенны АПГ и АПК. Излученный радиоимпульс принимается самолетным ответчиком и используется для такого уменьшения коэффициента усиления приемника, чтобы передатчик ответчика не смог ответить на запросные сигналы, приходящие по направлениям боковых лепестков антенн АГ и АК. Так осуществляется подавление ложных ответов при запросе по боковым лепесткам.
Спустя 2,4 мкс запускается передатчик ПД-1 импульсами ИЗ ПД АКТ. Он генерирует два запросных ВЧ импульса с кодовым интервалом 5,4 мкс, излучаемые антеннами АГ и АК.
Врежимах запроса РСП-1 и РСП-2 кодовые интервалы в каналах глиссады и курса одинаковы. Режим запроса УВД отличается от режимов запроса РСП-1 и РСП-2 только тем, что в канале глиссады используется код 3 мкс, а в канале курса – 5,4 мкс.
96
3.4.3. Принцип работы ПРЛ в режимах СДЦ и СОВМ
В режиме ПАСС часто обнаружение отметок ЛА на экране индикатора существенно затрудняют засветки, образуемые пассивными помехами – отраженными сигналами от местных объектов, искусственных сооружений и техники, облаков естественного и искусственного происхождения. Интенсивность засветок от пассивных помех порой настолько велика, что отметки от ЛА на их фоне не обнаруживаются.
Для выделения отметок ЛА (движущихся целей ) и устранения засветок от пассивных помех с экрана индикатора применяется устройство селекции движущихся целей (УСДЦ), называемое также компенсирующим устройством (КУ). В режимах СДЦ и СОВМ (СДЦ + ПАСС) передатчик ПРЛ генерирует ВЧ импульсы с приходом импульсов ИЗ ПД СДЦ с переменным интервалом следования (ТИ1 = 416 мкс, ТИ2 = 500 мкс). Необходимость изменения интервала следования ИЗ ПД можно пояснить следующим образом.
Прохождение ВЧ импульсов от ПД к антеннам АГ и АК, излучение ими зондирующих и прием отраженных от ЛА радиоимпульсов, прохождение отраженных ВЧ импульсов от антенн к ПР происходит так же, как в режиме ПАСС. Однако далее в ПР отраженный от ЛА (цели) сигнал в виде пачки ВЧ импульсов обрабатывается по-другому. В отличии от режима ПАСС между ПР и БОП включается селектор движущихся целей (СДЦ).
Принцип выделения (селекции) движущихся целей (ДЦ) основан на том, что расстояние от ПРЛ до местных объектов (МО) не изменяется или изменяется очень медленно, а расстояние до ЛА (ДЦ) изменяется с относительно большой радиальной скоростью VР (скоростью изменения дальности от ПРЛ до ЛА). Поэтому амплитуды и фазы отраженных от МО радиоимпульсов в течение 3 5 периодов излучения ПРЛ практически не изменяются. Амплитуды радиоимпульсов, отраженных от ЛА в течении Тобл, практически тоже не изменяются, тогда как их фазы от периода к периоду изменяются по закону φД(t) = 2πfД, где fД = 2VР/λ – доплеровское изменение частоты принимаемого сигнала, отраженного от ЛА. Следовательно, сигналы неподвижных целей (МО) на
5 периодов излучения ПРЛ практически не изменяются. Амплитуды радиоимпульсов, отраженных от ЛА в течении Тобл, практически тоже не изменяются, тогда как их фазы от периода к периоду изменяются по закону φД(t) = 2πfД, где fД = 2VР/λ – доплеровское изменение частоты принимаемого сигнала, отраженного от ЛА. Следовательно, сигналы неподвижных целей (МО) на
97
текущем периоде можно компенсировать с помощью сигнала на предыдущем периоде. Для этого необходимо сравнить принимаемый и излучаемый сигналы по фазе на текущем периоде, а по амплитуде – на текущем и предыдущим периодах. Сравнение сигналов по фазе выполняет фазовый детектор, а по амплитуде – вычитающее устройство (ВЧУ). Задержка выходного сигнала ФД на период следования импульсов осуществляется в ультразвуковой или цифровой линиях задержки (УЗЛЗ или ЦЛЗ).
Для выполнения этих трех преобразований с целью получения нулевого разностного сигнала пассивных помех необходимо выполнить соответственно три условия:
-опорный сигнал ФД должен быть когерентным с излучаемым сигналом;
-коэффициенты передачи сигналов предыдущего и текущего периодов должны быть одинаковы;
-один и тот же видеоимпульс на текущем и предыдущем периодах должен занимать одно и то же временное положение и иметь одинаковую форму.
Первое условие выполняется путем фазирования когерентного гетеродина (КГ) приемника, непрерывный гармонический сигнал которого служит опорным сигналом для ФД приемника. Передатчик ПРЛ генерирует последовательность ВЧ импульсов со случайными начальными фазами. С помощью ответвителя малая часть ВЧ импульсов передатчика направляется на КГ и «навязывает» ему свою начальную фазу. В результате на выходе КГ образуется непрерывный гармонический сигнал со случайной начальной фазой в каждом периоде, но синфазный с последовательностью ВЧ импульсов передатчика ПРЛ.
Второе условие реализуется с помощью детерминированного видеосигнала, имитирующего пассивные помехи. Полученный разностный сигнал используется для автоматического регулирования коэффициентов усиления прямого и задержанного сигнала пассивных помех с целью выравнивания величин входных сигналов вычитающего устройства.
Третье условие выполняется путем включения УЗЛЗ в состав УСФИ (БСФ). Время задержки сигналов в УЗЛЗ τЛЗ велико и
98
нестабильно. Это не гарантирует совмещение одного и того же видеоимпульса в соседних периодах. Поэтому в качестве задающего генератора используется блокинг-генератор (БГ) с самосинхронизацией по цепи обратной связи, включающей УЗЛЗ, используемую для задержки сигнала ФД предыдущего периода. При этом вероятность совпадения ВИ в соседних периодах практически близка к единице. Эта УЗЛЗ находится в БЧК, поэтому и БГ разместили там же, а УCФИ ввели в режим внешней синхронизации: при включении режима СДЦ последовательности задающих импульсов ЗИ 2180 и ЗИ КОМ, сформированные в БКИ, поступают в УСФИ, где из них получаются ИЗ ПД СДЦ с переменным интервалом следования.
Применение переменного интервала следования зондирующих импульсов в режиме СДЦ – мера вынужденная. Дело в том, что посадочный радиолокатор работает в импульсном режиме и с низкой частотой повторения импульсов. Поэтому доплеровская фаза φД(t) реализуется в виде импульсной функции, т. е. дискретно с частотой FИ. Это значит, если среди возможных значений есть частота FД = FИ (VР = λFИ/2), то видеоимпульсы на выходе ФД имеют постоянную амплитуду: исчезает признак движущейся цели (так называемый стробоскопический эффект). Эти скорости VР (частоты FИ) называют «слепыми»: ПРЛ «не видит» движущиеся цели («слеп»), хотя они реально есть. Стробоскопический эффект исчезает при изменении (вобуляции) частоты повторения зондирующих импульсов.
Рассмотренные принципы СДЦ реализуются следующим образом. Входной ВЧ сигнал приемника преобразуется в сигнал промежуточной частоты (ПЧ) и поступает в УПЧ с выходным ФД. Опорным сигналом ФД является выходной сигнал КГ в БФ, сфазированный с зондирующими импульсами передатчика. С выхода ФД двуполярные ВИ поступают в блок усреднения (БУ). Здесь последовательность видеосигналов с переменным интервалом следования преобразуется в последовательность видеосигналов со средним интервалом следования (периодом) ТИ = 458 мкс. Из БУ эта последовательность поступает в блок череспериодной компенсации (БЧК), где видеосигнал предыдущего периода за-
99
держивается в УЗЛЗ на период ТИ = 458 мкс и вычитается из видеосигнала текущего периода. Видеоимпульсы пассивной помехи компенсируются, а разностные двуполярные видеоимпульсы движущихся целей (ЛА) проходят в блок череспериодного вычитания (БЧВ). Здесь они приводятся к одной полярности, необходимой для ИКГ и к периоду повторения, равному периоду ИЗ ИКГ. Выходные сигналы УСДЦ далее поступают в УСФИ (БСФ), формируются по величине и подаются в блок очистки от помех (БОП). Очистка ВС СДЦ от НИП производится так же, как и видеосигналов в режимах ПАСС и АКТ.
В совмещенном режиме СДЦ + ПАСС алгоритмы СДЦ и ПАСС применяются в каждом периоде последовательно: примерно на первой половине периода реализуется алгоритм СДЦ (на дальностях, где наиболее интенсивны отражения от МО), а на второй половине – алгоритм ПАСС. При этом сочетаются достоинства режима СДЦ (подавление отражений от МО) и режима ПАСС (большая дальность обнаружения ЛА при отсутствии помех). Распределение высокочастотных сигналов по амплитудному и фазовому каналам приемника и согласование их интервалов следования осуществляется с помощью стробирующих видеоимпульсов, специально формируемых в БКИ и УСФИ (БСФ).
3.4.4. Устройство синхронизации и формирования импульсов
Устройство синхронизации и формирования импульсов (УСФИ) предназначено для формирования синхронизирующих (задающих) видеоимпульсов и декодирования (дешифрирования) отраженных сигналов в режиме АКТ. Это устройство в ПРЛ реализовано в виде блока синхронизации и формирования (БСФ).
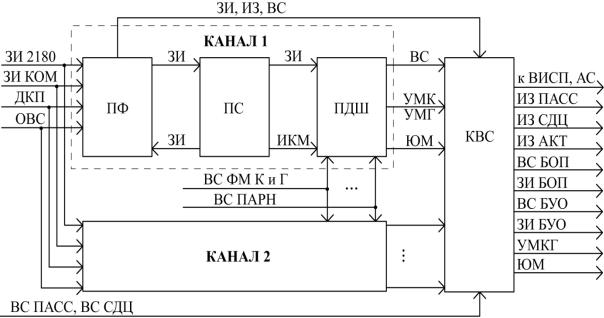
Структурная схема БСФ представлена на рис.3.5.
В ее состав входят два одинаковых канала (один – рабочий, другой – резервный) и коммутатор выходных сигналов (КВС) этих каналов. Входные сигналы БСФ одновременно поступают на оба канала, а выходные сигналы поступают к потребителям только от рабочего канала. Каждый из каналов включает плату формирователей (ПФ), плату синхронизации (ПС) и плату дешифратора (ПДШ).
100
Рис.3.5. Структурная схема блока синхронизации и формирования
Плата формирователей состоит из совокупности усилителей входных и выходных сигналов БСФ, обеспечивающих им необходимые величины и формы.
Плата синхронизации является основным узлом БСФ, в котором формируются все импульсы запуска устройств ПРЛ и задающие импульсы для БОП, БУО, выносного индикатора системы посадки (ВИСП), расположенного на командно-диспетчерском пункте (КДП), и аппаратуры сопряжения (АС).
Плата дешифратора выполняет декодирование и необходимую задержку отраженного выходного сигнала приемника в режиме АКТ (ВС АКТ). Кроме того, здесь же формируются угловые метки курса и глиссады (УМК и УМГ) и юстировочные метки (ЮМ) по видеосигналам ВС ФМ-К и ВС ФМ-Г от фотомодуляторов (фотодатчиков), установленных на валах вращения антенн АГ и АК.
В режимах ПАСС и АКТ блок работает в режиме внутренней синхронизации, а в режиме СДЦ – внешней синхронизации.
Как было отмечено выше, плата синхронизации обеспечивает формирование запускающих импульсов во всех режимах работы посадочного радиолокатора. Задачей платы является обеспечить необходимую задержку ЗИ. После нормализации ЗИ по ве-