

Принцип определения рлс дальности до цели
 Основывается
на прямолинейном равномерном
распространении радиоволн со скоростью
Основывается
на прямолинейном равномерном
распространении радиоволн со скоростью .
.


Принцип определения дальности: для
определения дальности необходимо
измерить время распространения сигнала
от цели до радиолокатора
 и полученную оценку
и полученную оценку пересчитать в оценку дальности
пересчитать в оценку дальности .
.

 – время распространения сигнала от
цели до радиолокатора (время запаздывания
сигнала), определяется в результате
сравнения по времени принимаемого
сигнала с излучаемым.
– время распространения сигнала от
цели до радиолокатора (время запаздывания
сигнала), определяется в результате
сравнения по времени принимаемого
сигнала с излучаемым. Если
Если измерить, то можно рассчитать дальность
до цели.
измерить, то можно рассчитать дальность
до цели.
Принцип определения рлс направления на цель
Принцип определения угловой координаты
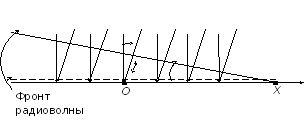
Принцип
измерения угловой координаты основан
на том, что радиоволны в точке
 и точке
и точке при
при проходят различные расстояния
проходят различные расстояния и
и
 – разница расстояний.
– разница расстояний.
Это
значит, что радиоволны, приходящие в
точку
 и точку
и точку отличаются по фазе на величину
отличаются по фазе на величину
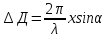

Это
при приёме сигнала в двух точках. При
использовании непрерывной апертуры
вдоль оси
 (непрерывного множества точек) следует
рассматривать непрерывное распределение
(непрерывного множества точек) следует
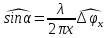
рассматривать непрерывное распределение По
определению пространственной частоты
По
определению пространственной частоты получаем:
получаем:

 универсальный принцип определения
угловой координаты.
универсальный принцип определения
угловой координаты.
При
двух точках:

 радиоволны приходят с фазой
радиоволны приходят с фазой

 или
или

Для определения
угловой координаты требуется знание
 или частоты
или частоты .
Знание о времени излучения не требуется.
.
Знание о времени излучения не требуется.
Принцип
определения угловой скорости ( и
и ):
):
Принципиально по радиолокационному сигналу можно определить угловые скорости следующим образом:
 - скорость изменения
- скорость изменения


Однако при посадке самолёта угловые скорости невелики и алгоритмы управления самолётами при посадке не требуют знания угловых скоростей. Поэтому радиолокационные средства посадки угловые скорости не измеряют.
Принцип определения рлс радиальной скорости цели
Основан на Доплеровском эффекте радиоволн.




 – принцип определения радиальной
скорости
– принцип определения радиальной
скорости
при
известной
 .
.
Принцип
определения радиальной скорости:
необходимо измерить доплеровское
изменение частоты
 и полученную оценку
и полученную оценку пересчитать в оценку скорости
пересчитать в оценку скорости .
Определение
.
Определение (а значит и
(а значит и )
возможно только при известной частоте
излучаемого сигнала
)
возможно только при известной частоте
излучаемого сигнала .
.
Параметры входного сигнала рлс соответствующие координатам и скоростям движения
Методы определения параметров Р.С.(координат, скоростей).






Основные методы радиолокации, их принципиальные отличия
По своей физической природе радиолокационный сигнал может быть трёх видов:
1)
радиолокационный сигнал, излучаемый
РПД, установленный на цели (или самой
целью) независимо от радиолокатора
 излучаемый сигнал
излучаемый сигнал
2)
радиолокационный сигнал, излучаемый
РПД цели по запросу радиолокатора
 ответный сигнал
ответный сигнал
3)радиолокационный сигнал, отражаемый целью при облучении её радиолокатора.
В зависимости от типа, используемого радиолокационного сигнала различают:
Пассивный метод радиолокации
Метод активного ответа (радиолокация по ответному сигналу)
Метод пассивного ответа (радиолокация по отражённому сигналу)
Пассивный метод радиолокации
 –номинальная
частота
–номинальная
частота
 –?
истинная частота
–?
истинная частота
Измерение дальности (невозможно при этом методе)

 , где неизвестное
, где неизвестное !
!
Измерение радиальной скорости (невозможно при этом методе)

 где неизвестная
где неизвестная .
.
Измерение угловых координат
В принципе возможно, опускается sin.


Опорное значение всегда известно!
Метод активного ответа
Измерение дальности


 где
где
 где
где
 -
время запаздывания ответного сигнала
относительно запросного
-
время запаздывания ответного сигнала
относительно запросного
 – время прохождения запросного сигнала
по цепям ответчика
– время прохождения запросного сигнала
по цепям ответчика
Измерение радиальной скорости


Измерения доплеровской частоты возможно только в том случае если частота запросного сигнала в ответчике не изменяется





Измерение угловых координат
Производится путём принципа определения угловых координат.
Значит,
радиальная скорость
 может быть измерена, если запросный
сигнал проходит по цепям ответчика без
изменения радиальной частоты. Однако
часто для засекречивания сигнала
добавляется кодовая добавка
может быть измерена, если запросный
сигнал проходит по цепям ответчика без
изменения радиальной частоты. Однако
часто для засекречивания сигнала
добавляется кодовая добавка (кодовое
изменение частоты), как правило,
неизвестная. В этой ситуации измерение
радиальной скорости невозможно.
(кодовое
изменение частоты), как правило,
неизвестная. В этой ситуации измерение
радиальной скорости невозможно.
Метод
пассивного ответа (по отраженному
сигналу).

Измерение дальности

 считаем что отражение минимально
считаем что отражение минимально


 – время запаздывания отражённого
сигнала относительно зондирующего
– время запаздывания отражённого
сигнала относительно зондирующего
Измерение радиальной скорости




Измерение угловых координат


Далее считаем что основным методом радиолокации является метод пассивного ответа. Этот метод является универсальным и позволяет обнаружить цели и определить их координаты независимо от того свои это самолёты или чужие.
В
качестве второго метода радиолокации
посадки используется метод активного
ответа, но он может работать только по
самолётам с самолётными ответчиками.
При использовании второго метода
запросный и ответный сигналы кодируются
по частоте. Т.к. кодовые частоты неизвестны,
измерение радиальной скорости не
производится(невозможно). Время
запаздывания в ответчике (время ответа)
учитывается для каждого типа С.О.(самолётн.
ответчики) отдельно. Незнание
 приводит к ошибкам измерения дальности
(500-1000 м.)
приводит к ошибкам измерения дальности
(500-1000 м.)