

ФИЗИКА3673
.pdfФедеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования
šКузбасский государственный технический университетŸ
Кафедра физики
ФИЗИКА
МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ
Комплекс К-402.3. Методические указания по самостоятельной работе для подготовки к выполнению лабораторных работ по разделу физики šМеханические колебания, маятникиŸ
для студентов всех специальностей
Составители: В. В. Дырдин И. С. Елкин
Утверждены на заседании кафедры Протокол № 1 от 28.08.2008 Рекомендованы к печати учебно-методической комиссией специальности 130404 Протокол № 9 от 16.09.2008 Электронная копия находится
в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2008
1
Содержание
Содержание …………………………………………….…….….….1
Введение……………………………………………………………..2
1. Лабораторная работа № 1 Определение момента инерции физического маятника ………….3
2. Лабораторная работа № 2 Определение момента инерции методом качаний………………...6
3.Лабораторная работа № 3 Определение постоянной кручения нити
баллистическим методом …………………………………...…….11
4.Лабораторная работа № 4
Изучение колебаний физического маятника.……..…….… …….16
5.Лабораторная работа № 5 Изучение механических колебаний
в упруго связанных системах …..……..……………… .………....22
6.Вопросы для самоподготовки………….………..……….…......30
7.Список литературы……………………………………….……..32
2
ВВЕДЕНИЕ
Комплекс К-402.3 представляет собой необходимый перечень лабораторных работ, предусмотренных образовательным стандартом и рабочей программой по разделу šМеханические колебанияŸ дисциплины šФизикаŸ. Он включает в себя описание лабораторных установок, порядок измерений и алгоритм расчета определенных физических величин.
Лабораторный практикум по физике призван помочь студентам усвоить основные физические явления и законы, ознакомиться с методами физических исследований, приобрести навыки экспериментальных измерений и оценки их результатов, выработать навыки экспериментального решения конкретных задач, умение формулировать постановку задачи, анализировать полученные погрешности измерений и делать вывод о соответствии ожидаемых и полученных результатов.
На самостоятельную работу студента отводится согласно учебному плану около половина учебного времени. Данные методические указания направлены помочь самостоятельно подготовиться и выполнить лабораторную работу. При подготовке к работе студент должен прочитать методические указания к выполнению лабораторной работы, прочитать указанные разделы в учебном пособии или учебнике, составить конспект в соответствие с общепринятыми требованиями. В лаборатории кафедры физики на лабораторной установке студент проводит опыты, результаты которых записываются в таблицы.
После всех расчетов и оформления отчета, студент должен сделать вывод, в котором конкретно указать те физические закономерности, которые были проверены в ходе выполнения работы.
На выполнение каждой из представленных в данном комплексе лабораторных работ отводится два часа аудиторных занятий.

|
|
|
3 |
|
|
|
|
|
1. ЛАБОРАТОРНАЯ РАБОТА №1. |
|
|||||
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ФИЗИЧЕСКОГО |
|||||||
|
|
|
МАЯТНИКА |
|
|
||
1. Цель работы |
|
|
|
|
|||
Ознакомление с методом экспериментального определения |
|||||||
момента инерции физического маятника. |
|
|
|||||
2. Подготовка к работе |
|
|
|
||||
Прочитать в учебниках следующие параграфы: [2] – µµ 16, |
|||||||
140 – 142, [3] – µµ 40, 41. Для выполнения работы необходимо |
|||||||
знать: а) закон динамики вращательного движения твердого тела; |
|||||||
б) основные уравнения кинематики; в) уметь пользоваться изме- |
|||||||
рительными приборами. |
|
|
|
|
|||
3. Выполнение работы |
|
|
|
||||
3.1. Описание лабораторной установки |
|
||||||
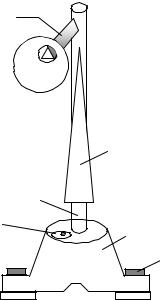
На рис. 1.1 представлена схема используемого в работе фи- |
|||||||
зического маятника. Он состоит из цилиндра массой m1 и радиу- |
|||||||
сом основания R, стержня дли- |
|
|
|
||||
ной L и массой m2 и двух грузов |
|
|
|
||||
в виде тонких дисков массой m3 |
|
m1 О |
|
||||
каждый, которые можно закре- |
R |
|
|
||||
пить на стержне |
в нужном по- |
|
|
||||
ложении. Ось колебаний |
маят- |
|
|
|
|||
ника проходит через точку O. |
|
m2 |
X C |
||||
Грузы m3 |
располагают на |
|
m3 |
|
|||
стержне симметрично на рас- |
|
|
|||||
стояния a от центра масс стерж- |
|
C |
a |
||||
ня C. |
|
|
|
L |
|||
|
|
|
|
||||
3.2. Методика измерений |
m3 |
a |
|||||
|
|||||||
и расчёта |
|
|
|
|
|||
|
величину m и |
|
|
|
|||
Рассчитаем |
|
|
|
||||
определим |
положение |
центра |
|
|
|
||
масс маятника: |
|
|
|
|
|
||
m m1 m2 2m3 . |
|
X |
|
||||
Для нахождения расстояния |
Рис. 1.1. Схема установки |
||||||
от оси колебаний до центра масс |
|||||||
маятника, проведем ось OX с на- |
|
|
|
||||

4
чалом в оси колебаний (в точке O). Координата центра масс механической системы находится по формуле
|
|
X C |
mi xi |
, |
|
|
|
|
|
|
(1.1) |
|||||||
|
|
mi |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где xi – координата центра масс i-го тела. В нашем случае |
|
|||||||||||||||||
X1 0 , |
|
|
X 2 |
|
L |
|
R , |
|
||||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
X3 |
L |
R a , |
|
X 4 |
|
L |
|
R a . |
|
|||||||||
|
|
|
|
|
||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||
Подставляя в (1.1), получаем |
|
|
|
|
|
L |
|
|
|
|
|
|
||||||
|
|
|
(m |
2 |
2m )( |
|
R) |
|
||||||||||
|
|
|
|
|||||||||||||||
|
X С |
|
|
3 |
|
|
2 |
|
|
|
|
. |
(1.2) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда видно, что положение центра масс маятника не за- |
||||||||||||||||||
висит от положения грузов m3(a) |
при их симметричном распо- |
|||||||||||||||||
ложении относительно середины стержня. |
|
|
|
|
|
|
|
|
||||||||||
Подставляя в формулу T 2π |
|
|
I |
|
|
|
|
|
, получаем рабочую |
|||||||||
|
|
|
|
|
|
|
|
|||||||||||
 mgXC
mgXC
формулу для экспериментального определения момента инерции физического маятника:
I э |
gT 2 |
(m |
2m )( |
L |
R). |
(1.3) |
|
|
|||||
|
4 2 |
2 |
3 |
2 |
|
|
|
|
|
|
|
Для удобства расчетов обозначим через K следующее выражение:
|
g(m 2m )( |
L |
R) |
|
||
|
|
|||||
2 |
3 |
2 |
|
|
|
|
K |
|
|
|
, |
(1.4) |
|
|
4π2 |
|
|
|||
|
|
|
|
|
|
|
где K – постоянная для данного физического маятника величина. |
||||||
Тогда |
|
|
|
|
|
|
|
I э KT 2 . |
|
|
(1.5) |
||
Период колебаний физического маятника, а значит и его |
||||||
момент инерции зависят от положения грузов m3 |
на стержне, |
|||||

5
т. е. от значения величины a . Найдем эту зависимость. Для этого рассчитаем момент инерции физического маятника теоретически. Так как момент инерции механической системы – величина аддитивная, то момент инерции маятника равен сумме моментов инерции всех составляющих его тел:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I т I |
I |
2 |
I |
3 |
|
I |
4 |
. |
|
||
|
|
|
|
1 m R 2 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||||||||||||
I |
|
|
|
|
|
|
|
|
|
|
|
– момент инерции цилиндра; |
|
|||||||||||||||||||||
|
1 |
|
|
2 |
|
|
1 |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
I2 |
|
1 |
|
2 |
|
|
|
|
|
|
2 |
– момент инерции стержня, |
|
|||||||||||||||||||||
12 m2L m2 |
( |
2 |
|
R) |
|
определенный по теореме Штейнера; |
||||||||||||||||||||||||||||
I |
|
m ( L R a)2 |
|
|
|
|
– моменты инерции тонких дисков m3 , |
|||||||||||||||||||||||||||
|
3 |
|
3 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
которые можно принять за материаль- |
|||||||||||||||
|
|
|
|
|
|
|
|
L |
|
2 |
|
|
|
|
|
|
ные точки. |
|
|
|
|
|
|
|
|
|||||||||
I4 m3( |
|
|
R a) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Тогда |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
L |
|
|
||||||||
|
|
|
|
|
|
|
|
|
I т |
m1R2 |
m2 L2 (m2 |
2m3 )( |
R)2 2m3a2 |
(1.6) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
12 |
|
|
|
|
|
|
|
2 |
|
|
|||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I т I 0 2m a2 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
(1.7) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
3 |
|
|
|
|
|
|
|
|
|
где |
|
I10 |
1 |
m1R2 |
|
1 |
m2L2 (m2 |
2m3 )( |
L |
R)2 – момент инерции |
||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
2 |
12 |
2 |
|
||||||||||||||||||||||||||||||
маятника при a 0 , т. е. при расположении грузов m3 в точке C. Из формулы (1.7) видно, что момент инерции физического
маятника линейно зависит от a 2 . Эта зависимость проверяется в работе экспериментально.
3.3. Измерение момента инерции маятника
3.3.1.Заполните табл. 1.1 и рассчитайте по формуле (1.4) постоянную физического маятника K.
3.3.2.Поместите оба груза m3 в середине стержня ( a 0 ).
Отклоните маятник на угол 5–6¹ и определите время t десяти полных колебаний маятника. Повторите опыт 5 раз, рассчитайте
t и период колебаний T t 10 . По формуле (1.5) рассчитайте момент инерции маятника. Данные занести в табл. 1.2.
6
|
Характеристики установки |
Таблица 1.1 |
||
|
|
|||
|
|
|
|
|
m2 |
m3 |
L |
R |
K |
кг |
кг |
м |
м |
кг∙м2 с–2 |
|
|
|
|
|
3.3.3. Измените положение грузов m3 на стержне и для четырех, указанных в таблице значений a, повторите измерения и расчеты, описанные в 3.3.2.
Оцените погрешность измерений.
3.3.4. Постройте график зависимости I f (a2 ).
3.4. Сделайте вывод о соответствии полученного графика формуле (1.7).
Таблица 1.2
Определение момента инерции маятника
а |
a2 |
|
|
t |
|
|
t |
T |
I э |
I т |
м |
м2 |
|
|
с |
|
|
с |
c |
кг»м2 |
кг»м2 |
0 |
|
|
|
|
|
|
|
|
|
|
0,10 |
|
|
|
|
|
|
|
|
|
|
0,15 |
|
|
|
|
|
|
|
|
|
|
0,20 |
|
|
|
|
|
|
|
|
|
|
0,25 |
|
|
|
|
|
|
|
|
|
|
2. ЛАБОРАТОРНАЯ РАБОТА №2.
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ МЕТОДОМ КАЧАНИЙ
1. Цель работы
1.1.Освоить метод экспериментального определения момента инерции диска с вырезом.
1.2.Теоретически рассчитать момент инерции диска с вырезом и сравнить его с экспериментальным.
7
2. Подготовка к работе
Прочитать в учебниках следующие параграфы: [2] – µµ 16, 140 – 142, [3] – µµ 40, 41. Для выполнения работы необходимо знать: а) закон динамики вращательного движения твердого тела; б) уметь пользоваться измерительными приборами.
3. Выполнение работы 3.1. Описание лабораторной установки
Установка для определения момента инерции твердого тела
методом качаний (рис. 2.1) состоит из призмы |
1, прикрепленной |
||
с помощью штифта к вертикальной |
стойке 2. Стойка установле- |
||
на в литой чугунной треноге 3, |
|
|
|
две ножки которой снабжены |
1 |
|
|
винтами 4. Это позволяет регу- |
|
||
|
|
||
лировать установку по уровню 5 |
|
|
|
так, чтобы опорное ребро приз- |
|
|
|
мы приняло горизонтальное по- |
|
|
|
ложение. Грань призмы является |
|
6 |
|
осью качаний тела, имеющего |
|
||
отверстие. К стойке прикреплена |
2 |
|
|
планка 6 клиновидной формы с |
|
||
углом при вершине 4О, которая |
5 |
3 |
|
является визиром, позволяющим |
|
4 |
|
следить за тем, чтобы размах ко- |
|
|
|
лебаний не превышал 7О. |
|
|
|
На призму 1 устанавлива- |
Рис. 2.1. Схема установки |
||
ется диск с вырезом, колебания |
|||
|
|
||
которого исследуются в данной |
|
|
|
работе. |
|
|
|
3.2. Методика измерений и расчёта |
|
||
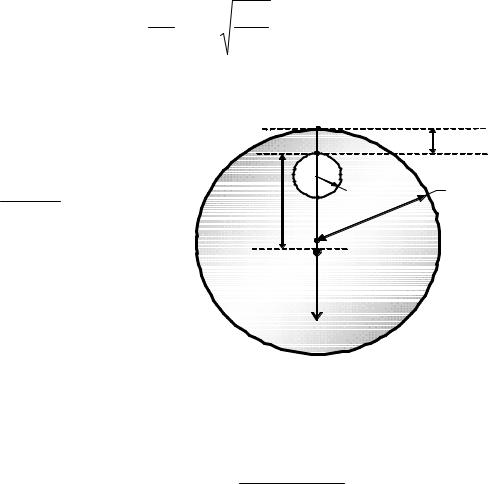
Момент инерции тела может быть определен экспериментально по методу качаний. В данной работе тело представляет собой однородный диск радиусом R , в котором вырезано отверстие радиусом R0 (рис. 2.2) Диск с вырезом может совершать колебания под действием силы тяжести относительно оси (опора D ), не проходящей через центр масс (точка C ). Такое тело называется физическим маятником. Период колебаний T физического маятника:
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
T 2π 2π |
J . |
(2.1) |
||
|
|
|
|
|
|
|
|
|
ω0 |
mgl |
|
|
|
Из формулы (2.1) выра- |
В |
|
|||||||||
зим момент инерции диска J |
D |
l0 |
||||||||||
относительно оси колебаний: |
||||||||||||
R0 |
|
|||||||||||
|
|
J |
mglT |
2 |
, |
(2.2) |
R |
|||||
|
|
|
l |
|||||||||
|
|
|
4 2 |
|
|
|
|
О |
|
|||
где |
Т |
– |
период |
колебаний; |
С |
|
||||||
l – расстояние |
от |
оси коле- |
|
|||||||||
|
|
|||||||||||
баний до центра масс маят- |
Y |
|
||||||||||
ника. |
|
|
|
|
|
|
|
|
|
|
||
|
Если начало отсчета по |
|
|
|||||||||
оси |
Y |
взять |
в |
|
точке |
D |
Рис. 2.2. Диск с вырезом |
|||||
(рис. 2.2), |
тогда |
|
|
координата |
|
|
||||||
центра инерции yc l |
|
|
|
|||||||||
|
|
|
|
y |
c |
|
mi yi |
или y |
m1y1 m2 y2 , |
|
||
|
|
|
|
|
|
m |
c |
m |
|
|||
|
|
|
|
|
|
|
|
|
|
|||
где m1 (m m0 ) масса сплошного диска; y1 (R l0 ) координата центра сплошного диска; m2 m0 – масса вынутой части диска; y2 R0 – координата центра вынутой части диска.
Подставляя значения масс и координат в формулу для yc ,
получим: |
|
||
yc l |
(m m0 )(R l0 ) m0 R0 |
. |
(2.3) |
|
|||
|
m |
|
|
Массу вырезанной части можно определить косвенно:
mm0 ρν ρπ R 2 h,
m0 ρv0 ρπ R02 h.
Выражая из нижнего соотношения h и подставляя в верхние, получим, что
9
|
|
|
mR2 |
|
|
|
|
|
|
m0 |
0 |
. |
|
|
|
(2.4) |
|
|
R2 R2 |
|
|
|
||||
|
|
|
0 |
|
|
|
|
|
Подставляя |
(2.4) в (2.3), |
получим |
|
|
|
|
||
|
|
[R2 (R l ) R3 |
] |
|
|
|||
|
l |
|
0 |
|
0 |
|
. |
(2.5) |
|
|
R2 R2 |
|
|
||||
|
|
|
|
|
|
|
||
|
|
|
0 |
|
|
|
|
|
Рассчитав l |
и экспериментально определив период колеба- |
|||||||
ний Т вычисляют момент инерции диска с вырезом. Момент инерции диска с вырезом можно рассчитать и теоретически по формуле (2.1), используя свойство аддитивности момента инерции:
J т J1 J 2 , |
(2.6) |
где J1 момент инерции сплошного диска (без выреза) относительно оси; J2 момент инерции вырезанной части относительно той же оси.
Моменты инерции J1 и J2 рассчитывают по теореме Штей-
нера: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(m m )R2 |
|
|
)2 |
|
|
|||||
J |
1 |
|
|
|
0 |
|
(m m )(R l |
, |
(2.7) |
||||
|
|
|
|
|
|||||||||
|
|
|
|
2 |
|
|
0 |
0 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
J |
2 |
|
m0R02 |
m R2. |
|
|
|
(2.8) |
||
|
|
|
|
|
|
|
|||||||
|
|
|
|
2 |
0 |
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляя (2.7) и (2.8) в (2.6) и учитывая (2.4), получают теоретическое значение момента инерции диска с вырезом отно-
сительно оси вращения: |
|
|
|
|
|
|
|
|
|||
|
|
|
m[R4 |
2R |
2 (R l |
0 |
)2 |
3R4 |
] |
|
|
J |
т |
|
|
|
|
|
0 |
|
. |
(2.9) |
|
|
2(R2 R2 ) |
|
|
||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
0 |
|
|
|
|
|
|