

7.2.1. Устройство цифрового измерительного регистратора
Цифровые измерительные регистраторы (ЦИР) это измерительные преобразователи (или измерительные приборы), специально предназначенные для динамических измерений и регистрации меняющихся электрических и неэлектрических величин в течение длительного интервала времени. Объем памяти данных в ЦИР значительно больше, чем в ЦИП для статических измерений. Кроме того, аналого-цифровой преобразователь ЦИР обычно гораздо более быстродействующий, чем в структуре обычного ЦИП.
На рис. 7.1 приведена упрощенная структура ЦИР.

Рис. 7.1. Структура цифрового измерительного регистратора
Если ЦИР многоканальный, то на входе стоит коммутатор К, который последовательно (или по определенной программе) выбирает («опрашивает») исследуемые сигналы x1(t), x2(t),…, xn(t) первичных измерительных преобразователей (датчиков). Далее выбранный сигнал подвергается аналоговым преобразованиям (в общем случае это могут быть масштабирование, т.е. усиление или деление сигнала, фильтрация, линеаризация). На схеме рис. 7.1, например, сигнал с выхода коммутатора К усиливается усилителем Ус и поступает далее на фильтр нижних частот ФНЧ, где подавляются высокочастотные помехи и шумы. Затем, с помощью устройства выборки/хранения УВХ происходит дискретизация сигнала (переход к дискретному времени) и квантование с помощью аналого-цифрового преобразователя АЦП. Последовательно получаемые в результате преобразования многочисленные результаты (коды) запоминаются и хранятся в оперативном запоминающем устройстве ОЗУ достаточно большой емкости. По окончании процедуры регистрации (или в процессе ее выполнения) эти данные могут быть выведены на индикатор Инд или переданы другим (внешним) устройствам по интерфейсу.
Узлы, отмеченные на рис. 7.1 пунктирной рамкой, могут отсутствовать в других вариантах структур ЦИР (контроллер на рис. 7.1 не показан).
Цифровые измерительные регистраторы уверенно вытесняют классические аналоговые средства динамических измерений/регистрации. Сегодня они широко применяются в задачах мониторинга (длительного наблюдения) параметров технологических процессов, окружающей среды; при различных энергетических обследованиях.
7.2.2. Дискретизация, квантование и восстановление сигнала
Термины «дискретизация» и «квантование» – по существу синонимы, но так сложилось (и это общепринято), что используются они по-разному. Термин «дискретизация» применяется обычно для обозначения процедуры замены непрерывного аргумента (текущего времени) ограниченной последовательностью мгновенных значений, т.е. перехода к дискретному времени. Термин «квантование» означает замену бесконечного множества значений непрерывной функции (уровня сигнала) конечными значениями из ограниченного множества цифровых эквивалентов. Дискретизация и квантование реализуют аналого-цифровое преобразование, которое является основой цифровой измерительной регистрации и имеет своей целью и результатом представление фрагмента непрерывного во времени и по уровню входного сигнала конечным числом цифровых эквивалентов (кодов).
По разным причинам обработка поступающих от АЦП цифровых данных не всегда выполняется в реальном времени (в темпе поступления исходных данных), поэтому необходимо промежуточное запоминание и хранение массива кодов в некотором запоминающем устройстве. Такая последовательность процедур дискретизации и квантования входного сигнала, запоминания и хранения кодов и является цифровой регистрацией. А поскольку в измерительных экспериментах требуется вполне определенная достоверность всех преобразований, то необходимо знание метрологических характеристик основных элементов структуры и всего устройства. В этом смысле речь идет о цифровой измерительной регистрации.
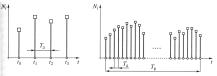
В результате процедур дискретизации и квантования фрагмент непрерывного (во времени и по уровню) входного сигнала х(t) трансформируется в массив цифровых эквивалентов (кодов Ni), соответствующих дискретным отсчетам в моменты времени t0, t1, t2, t3,…, взятые с шагом дискретизации Тд (рис. 7.2).

а б
Рис. 7.2. Дискретизация (а) и квантование (б) сигнала
Шаг дискретизации и интервал регистрации. Конкретная форма выполнения дискретизации определяется характером сигнала, его спектральным составом, требуемой точностью последующего цифрового преобразования и/или восстановления в аналоговую форму, задачами и алгоритмами последующей цифровой обработки информации, представления и др. Наиболее простой вид дискретизации – равномерная дискретизация, при которой промежуток времени между соседними отсчетами (шаг дискретизации Тд) постоянный в течение интервала регистрации Тр. Равномерная дискретизация является в технической реализации наиболее простой, поэтому и применяется в большинстве случаев.
В некоторых случаях используется и неравномерная дискретизация, в которой шаг дискретизации в процессе регистрации не постоянен, а определяется особенностями сигнала (например, скоростью изменения сигнала, т.е. текущим значением производной сигнала).
Рис. 7.3 иллюстрирует понятия шага дискретизации Тд (промежутка времени между соседними отсчетами – результатами аналого-цифрового преобразования) и интервала регистрации Тр (общего времени записи).
а б
Рис. 7.3. Иллюстрация понятия шага дискретизации (а) и интервала регистрации (б)
Поскольку значение шага Тд перед экспериментом может задаваться (программироваться пользователем) в некотором диапазоне, то возникает вопрос выбора конкретного значения шага Тд (или частоты Fд = 1/ Тд) дискретизации. Этот вопрос является достаточно важным. Чем меньше шаг Тд (или, что то же, чем больше частота Fд), тем лучше с точки зрения последующей обработки и восстановления сигнала. Но, с другой стороны, высокая частота дискретизации означает высокую скорость заполнения памяти регистратора, объем которой ограничен. Для каждого отдельного эксперимента значение частоты Fд определяется максимально возможной скоростью изменения входного сигнала; способом дальнейшего использования цифровой информации; алгоритмом обработки данных; целями и задачами восстановления входного сигнала по его цифровым эквивалентам; спецификой представления графической информации; требуемой окончательной погрешностью; объемом памяти.
В практике электрических измерений есть задачи, где требуется высокая частота дискретизации Fд входных сигналов (высокое быстродействие АЦП). Например, при анализе спектрального состава электрического сигнала напряжения сети может потребоваться частота дискретизации Fд = (100...200) кГц (шаг дискретизации Тд должен составлять, соответственно, 10...5 мкс). В то же время есть задачи, где достаточны сравнительно низкие частоты дискретизации (т.е. допустимы большие значения шага Тд дискретизации). Практически все тепловые процессы – это медленно меняющиеся процессы, при изучении которых возможна низкая частота дискретизации Fд. Например, для исследования характера изменения температуры в помещении в течение трех суток (т. е. общая продолжительность записи – интервал регистрации Тр = 72 ч) цифровым регистратором шаг дискретизации Тд может быть выбран равным 15 мин. Это означает, что по окончании записи будет зарегистрировано (сохранено в памяти) общее число отсчетов (результатов) N = 72 60/15 = 288. В некоторых случаях может оказаться достаточно информативным даже шаг дискретизации Тд = 1 ч.
Восстановление и представление сигналов. Представление цифровых данных о зарегистрированном входном аналоговом сигнале х(t) (рис. 7.4, а) в графической форме возможно по-разному (рис. 7.4, б...г). Оно определяется требованиями задачи эксперимента, квалификацией оператора, возможностями аппаратуры и др.

а б в г
Рис. 7.4. Способы восстановления и представления сигнала: а – входной сигнал; б – точечное представление; в – ступенчатая аппроксимация; г – линейная интерполяция
Восстановление может происходить в самом регистраторе/анализаторе или в компьютере, который выполняет обработку и представление зарегистрированных данных. Наиболее простым и не требующим дополнительных затрат является так называемое точечное представление (рис. 7.4, б), применяемое в основном в цифровых осциллографах и анализаторах с матричными индикаторами и принтерами. Основанный на способности человеческого глаза сглаживать последовательность множества точек при небольших расстояниях между ними, этот способ дает удовлетворительное качество изображения уже при разрешающей способности экрана 1,5...2 точки/мм.
Несколько сложнее реализуется ступенчатая аппроксимация (см. рис. 7.4, в), однако при невысоких разрешающих способностях АЦП по времени и амплитуде может создаваться искаженное представление о входном сигнале. Между тем, это наиболее распространенный способ восстановления и представления зарегистрированных сигналов.
В некоторых случаях применяется способ линейной {векторной) интерполяции (восстановление формы сигнала отрезками прямых линий), требующий определенных затрат на формирование отрезков (векторов), но дающий более гладкую кривую (см. рис. 7.4, г).
В любом случае, чем выше частота дискретизации в процессе регистрации и чем больше разрядность аналого-цифрового преобразования, тем точнее впоследствии может быть восстановлен сигнал по массиву зарегистрированных цифровых данных.