

4.Механические характеристики дптпв

Uc=I*Rц+Евр (1)
Rц=Rя+Rов Евр=Сω
ω=( Uc- I*Rц)/С – ур-е скоростной хар-ки
Отличие от ДПТНВ: Iя=Iвозб, то при больших колебаниях нагрузки Iвозб колеблется в тех же пределах, а изменение тока возбуждения в больших пределах сопровождается изменением магнитного потока, создаваемого Iвозб по нелинейной зависимости, называемой кривая намагничивания. Из-за насыщения стали с ростом I вырождается в ДПТНВ.
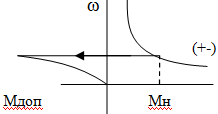
В связи с нелинейной зависимостью потока от тока насыщения механическая хар-ка двигателя так же будет нелинейной.
 рис.1
рис.1
Аналитического расчета этой хаки нет, но в каталогах эти двигатели приводятся на каждый отрезок серии универсальные зависимости M=f(Iв), ω=f(Iв) строятся в относительных единицах (параметр, разделенный на его номинальное значение)

Из анализа рис.1 следует, что с М→0 ω→∞. Следовательно, этот двигатель нельзя оставлять без нагрузки, он пойдет в разнос.
1)При введении Rдоб в цепь якоря хар-ки проходят мягче естественной
2)при ослаблении Ф хар-ки проходят выше естественной, сходясь в точке короткого замыкания. Ослабление потока достигается шунтированием обмотки возбуждения.
3)При ↓ Uс характеристики проходят ниже основной хар-ки и // ей
Тормозные режимы
1)Генераторный режим отсутствует, т.к. у этого двигателя хар-ка не пересекает ось оу, т.е. ЭДС вращения никогда не превзойдет приложенное U
2)режим торможения против включения
А)смена полярности обмотки якоря

Б)введение ограничивающего сопротивления

В)динамическое
В тормозных режимах, сопровождающихся сменой направления тока во избежание размагничивания магнитопровода двигателя на период торможения начало и конец обмотки возбуждения меняется на противоположный, тогда направление тока возбуждения в обмотке не изменится.
5. Механические характеристики асинхронного двигателя с фазным ротором
Схема замещения

 - ток ротора,
приведенный к току статора
- ток ротора,
приведенный к току статора

 -
скольжение двигателя
-
скольжение двигателя
Для определения механической характеристики сравним потери в роторе


Момент
критический Мкр определим взяв
производную



Из анализа уравнения следует:
1. Момент двигателя весьма чувствителен
к колебаниямU
сети, что следует учитывать при
эксплуатации двигателя
Момент двигателя весьма чувствителен
к колебаниямU
сети, что следует учитывать при
эксплуатации двигателя
2.Момент
критический не зависит от величины
активного сопротивления ротора
 ,
т.е. при введении добавочных сопротивлений
в цепь ротора, характеристики будут
проходить мягче естественной,а Мкр
останется постоянным
,
т.е. при введении добавочных сопротивлений
в цепь ротора, характеристики будут
проходить мягче естественной,а Мкр
останется постоянным

Тормозные режимы
1.Генераторный
осуществляется разгоном двигателя
внешним источником вращения выше
синхронной скорости
 ,
при этом активная Е преобразуется и
поступает в сеть, а реактивная идет на
создание контура намагничивания
,
при этом активная Е преобразуется и
поступает в сеть, а реактивная идет на
создание контура намагничивания
2.Торможение против включения
А)сменой чередования двух любых фаз
Тормозной
момент в этом случае возникает за счет
разных направлений вращения магнитного
поля с одной стороны, мгновенно
изменившего направление вращения после
смены чередования фаз, и ротора,
вращающегося по инерции в прежнем
направлении.

Б.введенеием Rд такой величины, когда Мкз (пусковой момент) меньше Мн
3.динамическое торможение осуществляется отключением обмотки статора от цепи переменного тока и подключением и подключением двух любых фаз сети постоянного тока.При этом возникает тормозной момент за счет взаимодействия постоянного магнитного потока, протекающего по обмотке статора от действия постоянного тока, протекающего в стержнях ротора, вращающегося по инерции.

Мкдт отличается от двигательного Мкр

Iэк – эквивалентный ток, удобный для расчета характеристики динамического торможения.