

§3.3. Преобразование интервалов длины, времени и скоростей.
В пункте 3.2. были получены преобразования Лоренца. С их помощью можно получить и обратные выражения:

Рассмотрим изменение пространственного
интервала вдоль оси
![]() .
.
Пусть стержень расположен вдоль оси
![]() и неподвижен.
и неподвижен.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Координаты в системе
![]() можно определять в различные моменты
времени, так как стержень неподвижен.
Для определения длины стержня, координаты
надо определять в один и тот же момент
времени
можно определять в различные моменты
времени, так как стержень неподвижен.
Для определения длины стержня, координаты
надо определять в один и тот же момент
времени![]() :
:

Определим значения временного интервала между двумя событиями, при переходе в другую систему отсчета.
Пусть временной интервал определяется часами, которые неподвижны.





![]()
![]()

![]()
![]()
![]()
Тогда интервал времени определяется
часами и будет равен:
![]() (в
системе
(в
системе![]() ),
и
),
и![]() (
в системе
(
в системе![]() ).
).

Определим проекцию
![]() :
:
![]()
 ;
;

Определим
![]() :
:

§3.4. Релятивистская динамика.
Уравнение движения материальной точки в классической динамике, имеет вид:
![]() (сила
действующая на точку, а
(сила
действующая на точку, а![]() - ее импульс)
- ее импульс)
Предполагается, что
![]() не зависит от скорости.
не зависит от скорости.
В теории относительности, уравнение движения точки имеет такой же вид, но при этом учитывается, что масса точки зависит от скорости.
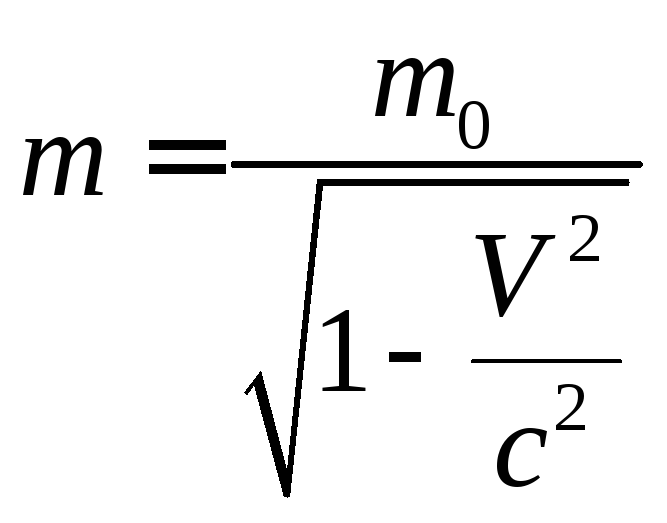 ,
где
,
где![]() - скорость точки, а
- скорость точки, а![]() - масса точки при
- масса точки при![]() .
.
Рассмотрим частицу, скорость которой
![]() :
:
Пусть ее скорость изменяется от 0 до
![]() ,
тогда
,
тогда![]() .
.
Если потенциальной энергии нет, то на
такую же величину измененится
![]() .
.
Известно, что
![]() , тогда:
, тогда:



В правой части равенства, стоит величина, которая не зависит от выбора системы отсчета, отсюда следует, что в левой части равенства стоит такая же величина.
![]()
Где![]() -
импульс и энергия частицы в системе
-
импульс и энергия частицы в системе![]() ,
а
,
а![]() -
импульс и энергия частицы в системе
-
импульс и энергия частицы в системе![]() .
.
§3.5 Четырех - векторы.
В классическом приближении, радиус-вектор
![]() и
т. д., принято считать векторами. В этом
приближении, длина этих векторов не
зависит от выбора системы отсчета. На
самом деле, длина этих векторов будет
изменяться.
и
т. д., принято считать векторами. В этом
приближении, длина этих векторов не
зависит от выбора системы отсчета. На
самом деле, длина этих векторов будет
изменяться.

![]()
![]()
![]()
![]()
![]()
В этом легко убедиться, вычислив:
![]()
Это означает, что радиус вектор материальной точки вектором не является.
Легко убедиться, что:
![]()
Такая квадратичная форма не зависит от
выбора системы отсчета и ее можно
рассмотреть как квадрат модуля некоторого
вектора, проекции которого на оси
координат будут
![]() .
Так как таких проекций – четыре, то
оказывается, вектор находится в
четырехмерном пространстве и его принято
называть – четырех - вектор радиус-вектор.
.
Так как таких проекций – четыре, то
оказывается, вектор находится в
четырехмерном пространстве и его принято
называть – четырех - вектор радиус-вектор.
В четырехмерном пространстве, система
![]() вращается относительно системы
вращается относительно системы![]() ,
вокруг их общего начала.
,
вокруг их общего начала.
Таким образом, из преобразований Лоренца следует, что векторами можем пользоваться только в четырехмерном пространстве, а в трехмерном – приближенно.
Отсюда возникло предположение, что наше пространство четырехмерное. Как оказалось впоследствии – это так.
Эйнштейн предположил, что любое тело, с достаточно большой массой искривляет пространство, что приводит к изменению траектории движения.
При переходе из одной системы отсчета в другую, проекции любого вектора должны преобразовываться по одинаковым правилам.
Преобразования радиус-вектора, при переходе из одной системы отсчета – преобразования Лоренца.
![]()
 ;
;![]() ;
;![]() ;
;
В пункте 3.4 было показано, что
![]() не зависит от выбора системы отсчета,
отсюда следует, что ее можно рассматривать
как квадрат длины некоторого четырех
– вектора с проекциями
не зависит от выбора системы отсчета,
отсюда следует, что ее можно рассматривать
как квадрат длины некоторого четырех
– вектора с проекциями![]() ,
где
,
где![]() - четырех – вектор импульса.
- четырех – вектор импульса.
Очевидно, что он будет преобразовываться по тем же самым формулам.
