

Начерт.гео-кожа
.pdfНа рисунке 12 проведены: через точку С – горизонталь; через А — фронталь. Важен порядок построения линий, например, для фронтали вначале строят проекцию на П1 (А111), а затем – ее вторую проекцию А212 по принадлежности точки 1 плоскости.
Через точку В на этом же рисунке проведены: линия наибольшего наклона к П1 (﬩h), линия наибольшего наклона к П2 (﬩f). ВЕ будет являться линией ската.
Вопросы для самоподготовки
1.Назвать основные способы проецирования, их особенности.
2.Принцип получения комплексного чертежа.
3.Какие прямые называют прямыми общего положения?
4.Какие прямые называют прямыми частного
положения? Привести примеры, дать характеристику.
5.Почему плоскость на комплексном чертеже задают определителем? Дать характеристику определителю.
6.Способы задания плоскости на комплексном чертеже.
7.Какие плоскости называют плоскостями общего положения? Охарактеризовать комплексный чертеж такой плоскости.
8.Какие плоскости называют плоскостями частного положения?
9.Как решить задачу на принадлежность точки плоскости? Прямой плоскости?
10.Как построить прямые уровня в плоскости?
Домашняя работа №2 «Позиционные задачи»
Методические указания к выполнению ДР№2
1.Изучить теоретический материал, представленный ниже.
2.При возникновении вопросов обратиться к учебной литературе.
3.Изучить пример выполнения домашней работы (прил. 2), объяснения выполнения работы в тексте.
4.Выполнить задание согласно своему варианту.
При выполнении работы необходимо различать основные понятия «поверхность», «геометрическое тело», иметь представление о классификации поверхностей. На рисунке 13 представлена схема классификации основных поверхностей, приведены их названия, примеры использования.
Геометрическим телом называют часть пространства, ограниченную со всех сторон поверхностями. Детали, используемые в качестве моделей для выполнения чертежей, как правило, можно мысленно разбить на составляющие геометрические тела – цилиндры, конусы, призмы, шары, торы и т. д.
11

Поверхности
|
|
|
|
|
Линейчатые |
|
|
|
|
|
|
|
|
|
|
|
Нелинейчатые |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Развертывающиеся |
|
|
|
Неразвертывающиеся |
|
|
С постоянной |
|
|
|
С переменной |
||||||||||||||||||||||
|
|
|
|
|
|
образующей |
|
|
|
образующей |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Многогранные (призматические, пирамидальные) |
|
|
|
Конические, цилиндрические, торсовые |
|
|
|
|
Цилиндроид, коноид |
|
|
Геликоид: прямой, наклонный |
|
|
Сфера, тор, элипсоид, параболоид |
|
Поверхность цилиндрических пружин, изогнутых труб |
|
Поверхность труб перемен.сечения |
|
|
|
Поверхность земли, обуви |
|
|||||||||
Рис. 13. Классификация поверхностей
Поверхность – бесконечный геометрический образ, поэтому, как и плоскость, задается на комплексном чертеже определителями. В качестве определителя для многогранных поверхностей и поверхностей вращения используют:
1) образующую; 2) направляющую или ось вращения.
Образующая – прямая или кривая линия, движущаяся в пространстве по определенному закону.
Направляющая – линия, которая задает направление движения в пространстве образующей.
Ось вращения – прямая, вокруг которой в пространстве совершает вращательные движения образующая. Обычно поверхности обозначают заглавными буквами греческого алфавита, в скобках пишут определитель.
Чтобы получить комплексный чертеж какой-либо поверхности, помимо проекций определителя необходимо дополнить его проекциями линий обрыва, линий контура и проекциями особых линий (например, ребра пирамидальной, призматической поверхностей). Линией контура называют линию, по которой проецирующие лучи касаются данной поверхности. Например, при проецировании сферической поверхности на плоскость проекций проецирующие лучи коснутся ее по окружности. Для поверхностей вращения используют термины «параллель», «экватор», «меридиан», значения которых видны на рисунке 14, где представлен комплексный чертеж поверхности вращения Г(i, ℓ). При вращении каждая точка образующей ℓ (ее проекция ℓ2 – кривая, ℓ1 – прямая) описывает окружность, плоскость которой перпендикулярна оси i. Такие окружности называют параллелями. Параллель наибольшего радиуса называют экватором, наименьшего – горлом. Плоскость (Σ), проходящую через ось поверхности вращения, называют ме-
12

ридиональной, линию ее пересечения с поверхностью вращения – меридианом. Меридиан, лежащий в плоскости, параллельной плоскости проекций, называют главным (в данном случае фронтальным) меридианом.
Для нахождения проекций точки, принадлежащей поверхности, важно определить ее принадлежность линии, принадлежащей поверхности, найти проекции этой линии, а затем
– проекции точки. Например, проекцией экватора на П1 поверхности вращения будет являться линия, названная на рисунке очерком (окружность). Поэтому проекции точки А, лежащей на поверхности вращения и принадлежащей экватору, на П1 находим на окружности. В случае, если на П2 точка А является видимой, то отмечаем точку А1, если неви-
димой – точку А'1.
На рисунках 15, 16 видимые точки показаны светлым кружочком, невидимые – тем-
ным.
Цилиндрическая поверхность образуется при вращении вокруг оси прямой, параллельной этой оси. Поверхность цилиндра (рис.15 а) является горизонтально проецирующей поверхностью1, следовательно, горизонтальная проекция F1 точки F должна совпадать с горизонтальной проекцией боковой поверхности цилиндра (с окружностью). F2 изображена светлым кружком, значит, точка F принадлежит передней поверхности цилиндра и спроецируется на нижнюю половину окружности. Третью проекцию F3 строим с помощью ординаты у, откладывая ее размер вправо от оси z3. При построении наглядного изображения цилиндра удобно пользоваться видимым для нас верхним основанием, откладывая на осевых линиях соответствующие координаты (x,y,z). Аналогично находят проекции точек, принадлежащих призматической поверхности.
Рис. 15. Точки на цилиндрической и конической поверхностях
Пусть требуется построить три проекции точки G, принадлежащей поверхности конуса вращения (рис. 15 б). Конус вращения образуется при вращении прямой вокруг оси, причем прямая (образующая) должна пересекать ось в точке, называемой вершиной конуса – S. Вершина конуса расположена выше основания, поэтому вся боковая поверхность конуса будет видимой при проецировании на горизонтальную плоскость проекций. При проецировании на фронтальную плоскость проекций видимой будет передняя половина боковой поверхности. Фронтальная проекция G2 задана светлым кружком, значит точка G принадлежит передней поверхности конуса. Горизонтальную проекцию G1 можно построить с помощью образующей или с помощью параллели. Рассмотрим способ образующей. Соединяем фронтальные проекции S2 и G2 прямой линией S2H2. Это будет фронтальная проекция образующей SH. Находим ее горизонтальную проекцию S1H1. Горизонтальную проекцию G1 искомой точки G находим, проведя вертикальную линию связи G2G1. Этот способ не дает точного результата в тех случаях, когда точка лежит вблизи передней
1 Проецирующей на плоскость проекцией называют поверхность, образующие которой являются проецирующими прямыми.
13

|
|
A2 |
|
A3 |
образующей конуса. Более |
уни- |
||||
|
|
|
версальным является другой спо- |
|||||||
C2 |
|
|
|
|||||||
|
|
C3 |
соб — способ параллели. Он за- |
|||||||
|
|
L2 |
|
|||||||
|
|
L3 |
Cy |
ключается |
в |
проведении |
через |
|||
|
|
O2 |
|
O3 |
точку G окружности или парал- |
|||||
|
|
|
|
V3 |
лели а. Ее фронтальная проекция |
|||||
V2 |
|
|
|
а2 пересекает фронтальную про- |
||||||
|
|
|
|
|||||||
|
|
|
|
|
екцию левой образующей в точке |
|||||
|
|
|
|
|
А2. Находим точку A1 |
и радиу- |
||||
|
|
|
L1 |
|
сом из центра S1 |
проводим |
||||
|
|
|
|
|
окружность a1 — горизонтальную |
|||||
Cx |
O1 |
|
|
проекцию параллели а. Пересече- |
||||||
V1 |
|
|
|
|
ние окружности с вертикальной |
|||||
Cy |
|
|
|
линией связи |
определяет |
точку |
||||
|
A1 |
|
|
|||||||
C1 |
|
|
|
|
G1. Иными словами, через точку |
|||||
|
|
|
|
G мысленно проводим горизон- |
||||||
Рис. 16. Точки на сферической поверхности. |
тальную плоскость уровня, рассе- |
|||||||||
кающую конус по окружности. |
||||||||||
|
|
|
|
|
||||||
|
|
|
|
|
Проекцией |
этой окружности на |
||||
|
|
|
|
|
П2 и П3 являются отрезки. Третью |
|||||
проекцию G3 |
находим с помощью ординаты у так же, как в предыдущей задаче; изобра- |
|||||||||
жаем ее зачерненным кружком, поскольку точка G при проецировании на плоскость П3 |
||||||||||
невидимая. |
|
|
|
|
|
|
|
|
|
|
На рисунке 16 показан пример |
построения проекций точек, принадлежащих сфере – |
|||||||||
А, С, L, V. Сфера – поверхность, образованная вращением окружности вокруг одной из |
||||||||||
своих осей. Центр сферы – точка О. Заданы три проекции сферы и вторые проекции точек. |
||||||||||
На фронтальной плоскости проекций точка L (L2) не видна, остальные точки находятся на |
||||||||||
передней поверхности сферы, т.е. являются видимыми. На горизонтальной плоскости |
||||||||||
проекций невидимой оказывается точка V (V1), а на профильной – L (L3). При построении |
||||||||||
проекций точек |
на П1 |
целесообразно использовать |
горизонтальные плоскости уровня, |
|||||||
при этом в сечении получаются окружности (на П1) и проекции окружностей на П2 |
и П3 – |
|||||||||
отрезки. Третьи проекции точек строят, используя |
профильные плоскости уровня, или |
|||||||||
откладывая от оси соответствующие расстояния (например, для точки С3 – это длина от- |
||||||||||
резка СхС1, обозначенная на чертеже Су). |
|
|
|
|
|
|||||
Позиционные задачи
Позиционными называют задачи на порядок расположения геометрических образов, на взаимное пересечение геометрических образов, на взаимную принадлежность геометрических образов. При этом задачи на пересечение геометрических образов назы-
вают главными позиционными задачами.
Таким образом, примерами главных позиционных задач являются задачи на пересечение:
1)линии с поверхностью,
2)двух или более поверхностей.
На рисунке 17 рассмотрен пример построения точки пересечения линии ℓ (ℓ1, ℓ2) с
плоскостью Φ (А, В, С) с помощью горизонтально-проецирующей плоскости Г (Г1), проходящей через прямую ℓ. Точка пересечения лежит на прямой, обозначенной 12. Проекция этой прямой на П1 совпадает с ℓ1 и Г1. На П2 проекцию прямой 12 находим по принадлежности плоскости точек 1 и 2.1222 ∩ ℓ2 = К2. Это вторая проекция точки. Первую
14

проекцию находим по принадлежности этой точки линии ℓ. Видимость на чертеже опре-
деляем с помощью конкурирующих точек2 3
и 2.
Примеры пересечения различных поверхностей (второй тип задач) в технике встречаются очень часто. Для правильного составления чертежей нужно уметь строить линии пересечения геометрических тел. Например, при выполнении эскизов деталей, линии пересечения поверхностей (геометрических тел), из которых они состоят, как правило, не замеряют, их строят непосредственно на чертеже.
Решая главную позиционную задачу на пересечение поверхностей, следует придерживаться следующих правил. Выбор метода решения зависит от формы пересекающихся поверхностей и их положения относительно плоскостей проекций.
Возможны три случая положения пересекающихся поверхностей в пространстве:
1)обе пересекающиеся поверхности занимают проецирующее положение;
2)одна из поверхностей занимает проецирующее положение, а вторая - общее положение;
3)обе пересекающиеся поверхности занимают общее положение.
Решение позиционной задачи, когда обе поверхности занимают проецирующее положение
В этом случае общий элемент уже задан на чертеже, и решение сводится лишь к обозначению его проекций. Линия пресечения поверхностей частично или полностью совпадает с проекцией поверхности, являющейся проецирующей на этой плоскости проекций. Например, задача на пересечение двух цилиндров, проецирующих на горизонтальную и фронтальную плоскости проекций соответственно (рис. 18).
Обводим линии пересечения цилиндрических поверхностей, частично совпадающих с их проекциями, обозначаем точки, принадлежащие линии (точки 1 и 2).
Задача считается решенной.
Решение позиционной задачи, когда одна из поверхностей занимает проецирующее положение, а вторая - общее положение
В этом случае одна из проекций искомого общего элемента непосредственно зада-
2 Конкурирующими называют точки, проекции которых на одной плоскости проекций совпадают. В данном случае используются горизонтально-конкурирующие точки (проекции на П1 совпадают).
15

на на чертеже. Вторая проекция может быть построена на основе условия принадлежности точек общего элемента непроецирующей поверхности.
Например, найти общий элемент двух поверхностей – конической и цилиндрической – задача, вынесенная на самостоятельную проработку (образец в прил. 2). Анализируя условие задачи, приходим к выводу, что проецирующей поверхностью является цилиндрическая, которая проецируется на П2. Следовательно, общий элемент следует искать на этой плоскости проекций. Общий элемент (линия пересечения) двух поверхностей в данном случае частично совпадает с проекцией цилиндрической поверхности на П2 – это линия, общая для двух поверхностей. Для того чтобы построить линию пересечения поверхностей на П1, нужно найти проекции опорных точек3, принадлежащих линии пересечения. На образце выполнения задачи (прил. 2) отмечены точки 1 – 6. Отдельные точки, принадлежащие линии пересечения поверхностей, строятся как точки, принадлежащие конической поверхности (так же, как на рис. 15 б).
Решение позиционной задачи, когда обе поверхности занимают непроецирующее положение
Вэтом случае задача может решаться методом секущих поверхностей. В качестве секущих поверхностей обычно принимают плоскости (чаще плоскости уровня) или сферы. В любом случае секущая поверхность должна быть выбрана таким образом, чтобы в сечении получались простейшие линии – прямые или окружности.
Вкаждом отдельном случае выбирают способ решения в зависимости от условия задачи. Рассмотрим решения двух подобных задач.
Пример 1. Требуется построить линию пересечения поверхностей – конической и сферической (рис.19 а). Анализ условия показывает, что обе поверхности являются непроецирующими, задачу следует решать при помощи вспомогательных секущих горизонтальных плоскостей уровня. Каждая такая плоскость пересекает обе поверхности по окружностям. Эти окружности на П2 совпадают с проекциями 2, 2', 2", а на П1 проецируются без искажения. Рекомендуется начинать построение линии пересечения с определения опорных точек. При определении точек пересечения главных меридианов надо сначала выяснить положение общей плоскости симметрии. Определив достаточное количество точек, соединяют эти точки плавной кривой линией, с учетом видимости. Ниже поэтапно рассмотрен пример решения данной задачи, чертеж представлен на рисунке
19 а.
Алгоритм решения
1.Находим опорные точки A, C на пересечении главных меридианов, так как общая плоскость симметрии Г (Г1) ║ П2.
2.Выбираем в качестве вспомогательной секущей поверхности горизонтальную плоскость уровня // П1.
3.Рассекаем обе поверхности выбранной плоскостью . Секущая плоскость должна располагаться между опорными точками A и C.
4.Определяем линии, по которым плоскость пересекает заданные поверхности: a
= и b = Ф.
5.На пересечении полученных линий a и b определяем точку 1, принадлежащую искомой линии пересечения.
6.Возвращаем точки пересечения поверхностей 11 и 11' (на чертеже не обозначена) на проекцию секущей плоскости 2 , получаем точку 12.
7.Таким образом, проводя множество секущих плоскостей ', " и т. д., находим множество точек, которые соединяем плавной кривой линией.
3 Опорные точки – точки пересечения главных меридианов, наивысшие и наинизшие точки, точки – границы между видимой частью линии и невидимой и т.д.
16

8.На построенной линии пересечения находим опорную точку В и определяем видимость на П1.
а |
б |
Рис. 19. Примеры построения линий пересечения непроецирующих поверхностей (пояснения в тексте)
Пример 2. Построить линии пересечения конической и цилиндрической поверхностей, занимающих общее положение по отношению к плоскостям проекций (рис.19б). Анализ задачи показывает, что еѐ следует решать методом секущих поверхностей, в частности, методом концентрических сфер4. При этом условия задачи должны удовлетворять трем пунктам:
1.пересекающиеся поверхности должны быть поверхностями вращения;
2.оси вращения этих поверхностей должны пересекаться, точка пересечения осей является центром сфер;
3.общая плоскость симметрии Г должна быть параллельна одной из плоскостей проекций.
Алгоритм решения
1.Находим опорные точки на пересечении главных меридианов – А, D.
2.Определяем вспомогательную секущую сферу максимального радиуса Rmах. За Rmах принимают расстояние от центра сфер до самой удаленной опорной точки D.
3.Определяем вспомогательную секущую сферу минимального радиуса Rmin. Сфера минимального радиуса должна касаться одной поверхности и пересекать другую.
4.Проводим промежуточную сферу между сферами радиуса Rmах и Rmin.
5.Определяем линию пересечения сферы с поверхностью Ф и с поверхностью : a = и b = Ф.
4 Решение этим методом предполагает использование сфер различного радиуса, построенных из одного центра так, чтобы они были вписаны в обе поверхности и в сечении получались окружности. Внимание! Способ эксцентрических сфер предполагает использование сфер, построенных из разных центров.
17
6.На пересечении полученных линий a и b определяем точку 1, принадлежащую искомой линии пересечения.
7.Таким образом, проводя множество сфер ' , '' и т. д., находим множество точек, которые соединяем плавной кривой линией.
8.На построенной линии находим опорную точку С и определяем видимость проекций линии пересечения на П1.
Вопросы для самоподготовки
1.Дать определение поверхности, Перечислить известные вам поверхности.
2.Классификация поверхностей. Дать характеристику.
3.Как задать поверхность вращения на комплексном чертеже?
4.Назвать и дать характеристику основным терминам, относящимся к поверхностям (направляющая, параллель и т.д.).
5.Охарактеризовать термин «главные позиционные задачи»
6.Привести примеры главных позиционных задач.
7.Как выбрать способ решения позиционной задачи?
8.Перечислить и охарактеризовать способы решения главных позиционных задач.
9.По каким критериям выбирается секущая поверхность при решении позиционных задач? Привести примеры секущих поверхностей.
10.Указать отличительный признак способов концентрических и эксцентрических сфер.
Домашняя работа №3 «Метрические задачи»
Методические указания к выполнению ДР№3
1.Изучить теоретический материал, представленный ниже
2.При возникновении вопросов обратиться к учебной литературе
3.Изучить пример выполнения домашней работы (прил. 3), объяснения выполнения работы в тексте
4.Выполнить задания, записав шрифтом №5 геометрическими символами данные задачи, решение.
Задачи на определение расстояния между двумя заданными точками пространства или определение натуральной величины отрезка прямой относятся к метрическим. Для решения этих задач используют различные способы. Наиболее предпочтительными способами являются способы преобразования комплексного чертежа. К ним относятся:
1)способ перемены плоскостей проекций, или, другое название, способ введения дополнительных плоскостей;
2)способ вращения (вокруг любой прямой или проецирующей прямой, или прямой уровня);
3)способ плоскопараллельного перемещения
Цель использования этих способов – добиться, чтобы геометрические образы, занимающие общее положение относительно плоскостей проекций, становились геометрическими образами частного положения. Для этого, не меняя положения заданных геометрических образов по отношению к П1 и П2, ввести новые плоскости проекций так, чтобы на них можно было ортогонально спроецировать имеющиеся геометрические образы (в этом случае используется первый способ – введения дополнительных плоскостей проекций). Также можно, не меняя аппарата проецирования (положения плоскостей проекций), изменить положение заданных геометрических образов в пространстве так, чтобы они стали занимать частное положение по отношению к плоскостям проекций (второй или третий способы). Выбор способа решения зависит от условий задачи. Любой из способов преобразования комплексного чертежа выполняют по определенным правилам.
18

1) Способ введения дополнительной плоскости. Принцип этого способа продемон-
стрирован на рисунке 20: рисунок 20 а наглядно показывает введение одной дополнительной плоскости проекций П4, отвечающей условию: П4┴ П1, на рисунке 20 б построен комплексный чертеж данной задачи, где Х1- линия пересечения П4 и П1 , А1 А4┴ Х1 , А2 Ах = Ах1 А4.
Рис. 20 Способ введения дополнительной плоскости
При введении дополнительной плоскости ее строят так, чтобы выполнялись некоторые условия. В некоторых случаях одной дополнительной плоскости бывает недостаточно. К примеру, требуется найти натуральную величину треугольника MNP, принадлежащего плоскости общего положения (Приложение 3, задача 9). Плоскость П2 заменяем на П4 , плоскость общего положения при этом становится проецирующей, имея к.ч. П1 – П4, вводим дополнительную плоскость П5 ∆ M4N4P4. В результате плоскость треугольника спроецируется на П5 в натуральную величину. Решение задачи на образце выполнения записано геометрическими символами.
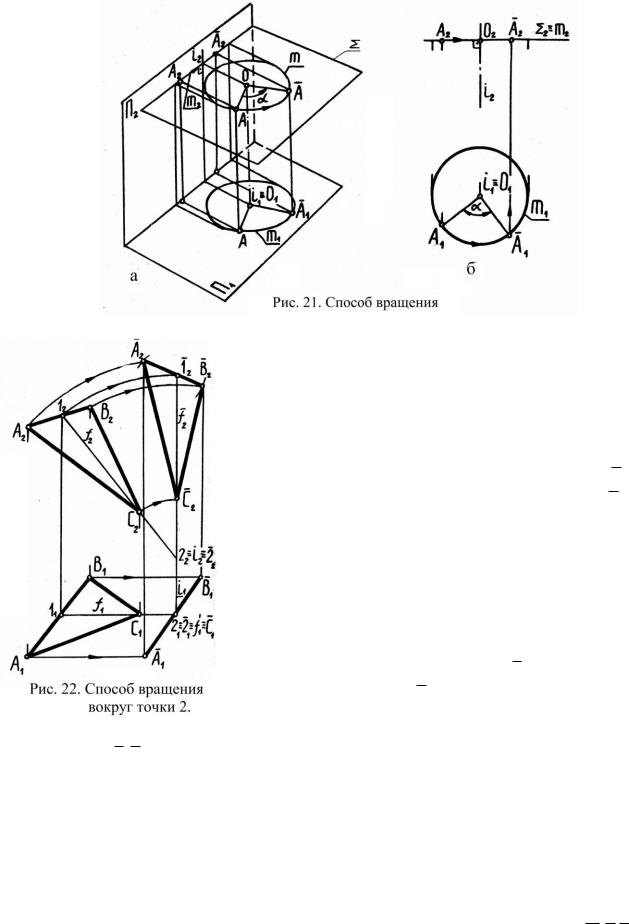
2) Способ вращения. Принцип этого способа показан на рисунке 21: рисунок 21 а наглядно демонстрирует изменение проекций точки А при повороте ее на угол α, на рисунке 20 б построен комплексный чертеж решения этой задачи. Точка А проецируется на П1 и П2. Поворачиваем точку в плоскости Σ, которая параллельна П1, вокруг некоторой горизонтально проецирующей прямой i. Как видно из рисунка, прямая i пересекает плоскость Σ в точке О. При вращении вокруг точки О в плоскости Σ точка А перемещается по дуге окружности, которая проецируется на П1 в натуральную величину, а на П2 – в отрезок.
Обычно вращение проводят вокруг прямой уровня или проецирующей прямой, или точки, добиваясь решения задачи. Например, на рисунке 22 треугольник АВС, принадлежащий плоскости общего положения, после поворота вокруг точки 2 занимает горизонталь- но-проецирующее положение. Точка 2 принадлежит фронтали плоскости, при повороте вокруг нее все точки треугольника перемещаются по дугам окружностей.
Поворот осуществляют так, чтобы фронталь заняла проецирующее положение по от-
ношению к П1. Дуги окружностей проецируются на П1 в отрезки ( A1 A1 , B1 B1 и т.д.)
19
Например, требуется найти натуральную величину отрезка АВ прямой общего положения (прил. 3, задача 8). Для решения задачи выбираем ось вращения i, которая является горизонтально-проецирующей прямой, проходящей через точку А. Отрезок АВ вращаем до положения фронтали. Проекция точки В отрезка АВ на П1 перемещается по дуге окружности (точка А при этом остается на месте).
Проекцией дуги окружности на П1 будет отрезок B2 B2 . На П2 получаем натуральную величину отрезка АВ – A2 B2 .
3) Способ плоскопараллельного перемещения пока-
зан на рисунке 23. Горизонтальную проекцию А1В1 перемещаем в свободное поле чертежа, располагая перпендикулярно линиям связи, при этом длину отрезка не изменяем. Для построения фронтальной проекции А2В2 после перемещения проводим из точки А2 прямую перпендикулярную линиям связи до пересечения с прямой параллельной
линиям связи, проведенной из точки A1 . Пересечение этих
прямых дает проекцию A2 . Аналогично строим проекцию
точки В. Поскольку, перемещая отрезок прямой АВ, располагаем его параллельно П2, на этой плоскости проекций получаем натуральную величину
АВ, равную A2 B2 . Этот способ является частным случаем вращения вокруг проецирующей
прямой, положение которой можно определить.
В Приложении 3 (задача 10), представлен образец решения задачи по определению натуральной величины треугольника MNP способом плоскопараллельного перемещения. Ниже прописан алгоритм ее выполнения:
1)Проводят прямую уровня в плоскости треугольника (в рассмотренном примере – горизонталь PF).
2)Переносят одну из проекций треугольника так, чтобы прямая уровня стала проеци-
рующей (построили |
|
|
|
|
|
M N P |
, так, чтобы |
|
|
|
|
OX ). |
||
M |
|
N |
|
P |
P |
F |
||||||||
1 |
1 |
1 |
1 |
1 |
1 |
|
1 |
1 |
||||||
3) Строят вторую проекцию плоскости треугольника, являющуюся прямой ( M2 P2 N2 ).
20