

11 Магнитный индукционный компас.
Недостатки магнитного компаса с вращающимся чувствительным элементом не позволяет с высокой точностью определить КС. В связи с этим в авиации используется индукционный компас, в котором отсутствует вращающийся чувствительный элемент. Значение КС выдается в виде электрического сигнала, который возможно передавать на большие расстояния. Следовательно, сам датчик возможно разместить в тех частях самолета, где его магнитное поле минимальное.
В качестве чувствительного элемента компаса используется электромагнитный зонд, состоящий из 2-х пермаллоидовых стержней, имеющих высокую магнитную проницаемость.

Каждый из стержней имеет первичную обмотку в то время, как оба стержня окружены вторичной обмоткой. Первичная обмотка питается переменным током и вызывает переменную магнитную проницаемость стержней. Т.к. эти стержни находятся в магнитном поле Земли, то оно (магнитное поле Земли) создает в стержнях переменные магнитные потоки, которые в свою очередь индуцируют переменное напряжение во вторичной обмотке зонда.
Это напряжение прямо пропорционально магнитной проницаемости стержней и cos КС.

т.к. согласно формуле КС однозначно может быть определен с помощью одного зонда только от 0 до 90˚, то в практике применяют 3 зонда, расположенных относительно друг друга под углом 60˚.

Для устранения этого недостатка вторичные обмотки 3-х зондов соединяют в систему «звезда», концы которой выходят на стартовую обмотку сельсина. Каждый из 3-х зондов создает ЭДС(электродвижущую силу), зависящую от его положения в магнитном поле Земли. В статорной обмотке сельсина они суммируются и создают магнитное поле, вектор которого параллелен вектору магнитного поля Земли. Ротор сельсина всегда поворачивается таким образом, чтобы занять полодение, параллельное этому вектору. Т.о. определяется КС. Точность компаса ±0.2˚
12 Основные свойства 3-х степенного гироскопа.
Под гироскопом понимают массивное, быстровращающееся вокруг своей оси симметрии тело. В зависимости от подвески, в которой вращается гироскоп, различают 2-х степенные и 3-х степенные гироскопы. Все 3 оси вращения гироскопа должны пересекаться в одной точке, совпадающей с центром масс гироскопа. Такой гироскоп называется астатическим.
3-х степенной гироскоп обладает 2-мя основными свойствами:
1)гироскоп сохраняет собственную ось вращения в инерциальном пространстве при отсутствии внешних сил.
2)свойство прецессии (вынужденное вращение): если к гироскопу приложена внешняя сила, то гироскоп прецессирует, стремясь совместить вектор вынужденного вращения с вектором собственного вращения.



Вектор собственного углового вращения направлен вдоль оси вращения таким образом, что если смотреть с конца вектора, то вращение осуществляется против хода часовой стрелки.
13 «Уход» гироскопа, установленного на самолете за счет вращения Земли и путевой скорости.
Искажения показания гироскопа = «уход»

Для установления искажений показаний гироскопа за счет углового вращения Земли и путевой скорости самолета необходимо найти угловые скорости вращения гироскопа вокруг собственных осей ох и оу, вызванные влиянием этих составляющих.
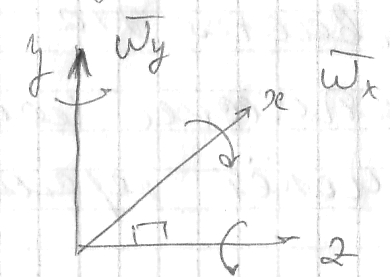
Для этого необходимо найти проекции векторов углового вращения на оси гироскопа. Введем 2 системы координат:
ox’y’z’ – географическая система координат
oy’ – направление вдоль местной вертикали к радиусу R.
ox’ – касательная в точке о к параллели точки о и направлена на восток
oz’ – вдоль меридиана на север
oxyz – система координат гироскопа
oz – направление вдоль продольной оси самолета и являющаяся соственной осью вращения гироскопа.
oy – совпадает с местной вертикалью и осью oy географической системы
Самолет находится в точке О с путевой скоростью w и курсом ψ.
w – вектор путевой скорости
 –вектор угловой скорости
вращения Земли
–вектор угловой скорости
вращения Земли
Для нахождения вектора
 ,
перенесем его в точку О.
,
перенесем его в точку О.
() – широта точки О.
1.

Для установления влияния w на показания гироскопа, найдем его проекцию wE и wN на ось ox’ и oz’.
2.wE=wsinψ
wN=wcosφ
Для установления угловых скоростей самолета по параллели и меридиану разделим скорости w на радиус параллели и радиус меридиана.

3.

Направление векторов ωE и ωN установленное по правилу правой руки будет следующим: wE параллелен вектору вращения земли ωз, а wN перпендикулярен плоскости меридиана и направленный в противоположную сторону оси ox’.
для установления углового вращения, вызванного вектором wE необходимо его значение из формулы 3 подставить в формулу 1 вместо вектора
 .
.
4.


5.

Для установления общего
влияния векторов
 и w суммируем угловые
скорости по осям х и у
и w суммируем угловые
скорости по осям х и у
6.

Формулы 6 показывают «уход» гироскопа (вращение) вокруг своей оси ох и оу при полете со скоростью w и курсом ψ.
Для устранения вращения ωx
в практике на ось oz
гироскопа устанавливают электролитический
уровень, который с высокой точностью
фиксирует в виде электрического сигнала
отклонение оси от горизонта. Эти сигналы
поступают на разгрузочный электродвигатель,
размещенный на оси ох, который
пропорционально величине сигнала
удерживает oz в горизонтальном
положении. Вращение
 ,
вызванное вращением
,
вызванное вращением ,
компенсируется с помощью широтного
корректора по известным
,
компенсируется с помощью широтного
корректора по известным и φ.
и φ.
Второе составляющее формулы
6 ( ),
техническими устройствами компенсировать
нельзя, но оказывается, эта величина
автоматически компенсируется, если
самолет перемещается по ортодромии.
),
техническими устройствами компенсировать
нельзя, но оказывается, эта величина
автоматически компенсируется, если
самолет перемещается по ортодромии.