

6 Расчет элементов захода одним виражом.

1. - с одним разворотом
- с одним разворотом


В случае, когда (формула1) для выполнения захода необходимо рассчитать угол крена по формуле 1.
При наличии вектора и
стандартном расчете захода по Ву самолет
под воздействием составляющей ветра
 сместится относительно начала второго
маршрута на величину Δy
и окажется в точке В”. Для того, чтобы
вывести самолет в точку В начало второго
маршрута необходимо выполнить расчет
угла крена с выходом в точку В’ , отстоящую
от начала маршрута на величину Δy.
Тогда под воздействием ветра самолет
окажется в точке В. Из рисунка следует,
что:
сместится относительно начала второго
маршрута на величину Δy
и окажется в точке В”. Для того, чтобы
вывести самолет в точку В начало второго
маршрута необходимо выполнить расчет
угла крена с выходом в точку В’ , отстоящую
от начала маршрута на величину Δy.
Тогда под воздействием ветра самолет
окажется в точке В. Из рисунка следует,
что:
2.
3.
4.
5.
6.
«+» - по ветру, «-» - против ветра
6 подставляем –>5–>4
7.
8.
9.
R в формулу 1.
10.

Линейное смещение вдоль
маршрута, вызванное составляющей ветра
 учитывается путем расчета путевой
скорости по
учитывается путем расчета путевой
скорости по

7
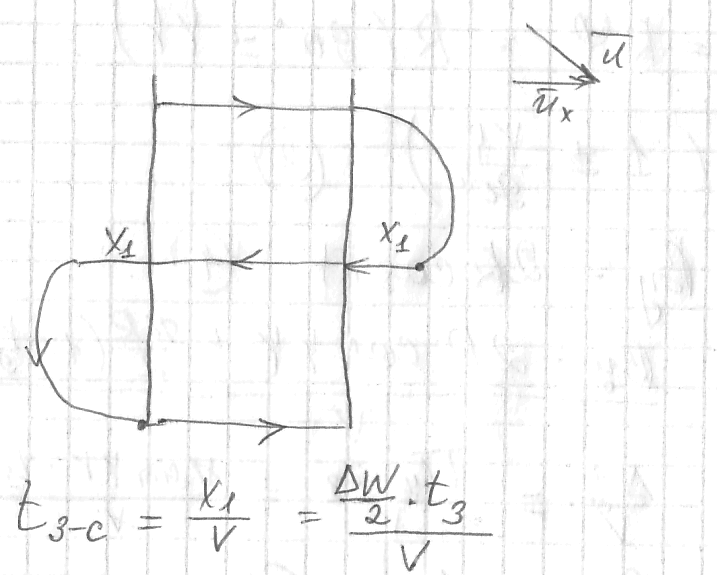
Расчет элементов захода при съемке в мелком масштабе.

tv – время захода в безветренную погоду (штиль)
tз – время захода при наличии
ветра
 .
.
DE=Δy
Из рисунка следует, что
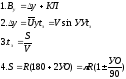
1.

где Δt – время, равное прохождению самолета величины Δy.
Из рисунка:
2.
3.
4.
5.
6.
6 подставим в 1, получим 7.
7.
8.

9.

5 подставим в 9 и заменим
 в результате чего получим окончательную
формулу времени захода
в результате чего получим окончательную
формулу времени захода


8
Расчет элементов захода при съемке в крупном масштабе.

Для выполнения данного захода необходимо рассчитать:

Из рисунка следует:
Подставим значение 4 в 3 и 2:

Т.к. УО выбирается по значению By и УУ из специальных графиков (номограмм), то для их построения необходимо рассчитать соотношение (Bу/R), задавая соответственным значением УУ.

Ву и УУ находят по номограмме УО.
Величина х геометрического смещения определяется из следующих зависимостей:


9
Принцип построения курсовой системы самолета.
Для прохождения самолета по заданному направлению используется ряд датчиков, определяющих курс следования носителя. Все датчики используют различный принцип определения этого угла. Объединенные в один синхронноработающий блок эти датчики составляют курсовую систему. В настоящее время используют 5 принципов определения направления:
магнитный принцип, в основу которого положено свойство чувствительного элемента находить направление магнитного меридиана.
Индукционный принцип, в основу которого положено свойство магнитного поля земли создавать ЭДС(электродвижущую силу) в обмотке специальных стержней, пропорционально курсу следования самолета.
Гироскопический принцип, в основу которого положено свойство 3-х степенного позиционного гироскопа сохранять в инерциальном пространстве направление собственной оси вращения. (Инерциальное – где Земля – точка, не связаны.)
Астрономический принцип определения истинного курса следования, который выполняется путем пеленгации навигационных звезд или солнца. Зная пеленг светила путем вычислений определяется истинный курс следования.
В основу 5-го принципа положено свойство бортовой радиостанции измерять курсовой угол, передающей станции, находящийся на Земле.
10 Девиация магнитных компасов.

Nк – компасный меридиан
Nм – магнитный
N – истинный
Линия Nк, вдоль которой устанавливается чувствительный элемент компаса называется компасным меридианом.
Угол Δg м/у магнитным и компасным меридианами называется девиацией магнитного компаса.
Девиация обусловлена наличием собственного магнитного поля самолета. В конструкции самолета имеются активные в магнитном отношении металлы, которые при компановке самолета намагничиваются магнитным полем Земли и создает постоянное магнитное поел самолета. Вектор этого поля постоянен, относительно координатной системы самолета.
Допустим, что вектор магнитного поля самолета совпадает и продольной осью самолета, тогда на курсе = 90˚ будет наблюдаться следующая картина:


Девиация, вызванная твердыми в магнитном отношении металлами на противоположных курсах равна по величине и противоположна по знаку. Девиация такого типа называется полукруговой. Достигает 5-7˚, и подлежит устранению путем специальных девиационных работ. На борту самолета имеются мягкие в магнитном отношении металлы, которые в зависимости от КС перемагничиваются и создают переменное магнитное поле самолета, магнитная напряженность которого определяется по формуле:

Подставляя в эту формулу значение КС, кратное 45˚, видно, что максимальное значение магнитного поля будет приобретать при КС=45˚(90˚+135˚ и т.д. градусов)
Девиация такого типа называется четвертной, устранению не подлежит, а поэтому ее необходимо определять ежегодно.(достигает 3˚)
Списание девиации = установление.
§ Креновая девиация.

При осуществлении разворота самолета, в обязательном порядке наблюдается его крен – γ. В случае, когда чувствительный элемент магнитного датчика нестабилизирован, а наклоняется с самолетом (рис.1) на него действует составляющая вертикального магнитного поля Земли F3, в результате чего наблюдается большие девиационные ошибки, при этом девиация называется поворотной. Для уменьшения этой ошибки чувствительный элемент стабилизируется с помощью гироскопа и всегда остается в горизонтальном положении. Тогда на него будет действовать вертикальная составляющая Fc, магнитного самолета, она значительно меньше F3. Отклонение магнитного датчика от напряжения меридиана будет вызывать сила Fc’, которая всегда перпендикулярна продольной оси самолета. Учитывая это влияние креновой девиации при разворотах с курсов 0˚, 180˚ и 90˚,270˚ будет следующим:

При полетах с курсом 0˚,180˚ и выполнении разворота с креном, составляющая Fc’ будет перпендикулярной к меридианам и вызывать максимальное значение креновой девиации Δк.
При разворотах, осуществляемых при КС = 90˚,270˚, сила Fc’ по величине будет такой же, как и в первом случае, но она будет совпадать с направлением магнитного меридиана => девиация будет = 0. Поэтому, согласно инструкции АФС маршруты предлагается выполнять с КС 90˚,270˚.
Лекция№7