

Статическая характеристика системы управления
Статическая характеристика - зависимость установившегося значения выходного сигнала системы Yот входных сигналовХ(ход органа управления) иF(сила, прикладываемая к органу управления). Обычно рассматривают две статические характеристики по каждому из двух входных сигналов системы управления (рис. 19).
Параметры статической характеристики, определяющие управляемость системы:
1) коэффициент преобразования К;
2) холостой ход для L0;
3) зона нечувствительности F0;
4) гистерезис G.
Коэффициент преобразования
Коэффициент преобразования - в общем случае производная:
KF=dY/dFилиKХ=dy/dХ.
Если статическая характеристика линейная, то коэффициент преобразования - это отношение приращения установившихся значений Yк приращению входного сигнала:
KF=ΔY/ΔFилиKХ=ΔY/ΔХ.
Коэффициент преобразования Kоказывает очень сильное влияние на управляемость системы управления. При его увеличении снижается силаFна органе управления и ходХоргана управления (см. рис. 19).
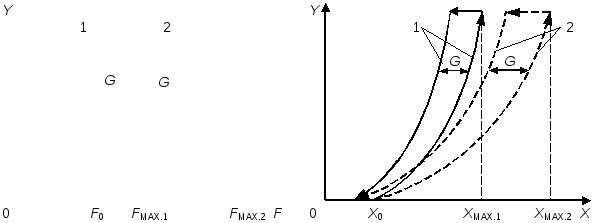
Рис. 19. Пример статических характеристик по силе F, прикладываемой к органу управления и по перемещениюХ органа управления. Коэффициенты преобразованияKFиKХхарактеристик 1 выше, чем характеристик 2, а силаFMAXи ходXMAX– меньше
Для обеспечения хорошей управляемости значения коэффициента преобразования Kдолжно приниматься по двум условиям:
1) сила на органе управления перемещение органа управления в пределах физиологических возможностей наиболее слабого и низкорослого водителя;
2) достаточная точность и скорость управления, для обеспечения которых учитывают тот факт, что время управляющего воздействия водителя tРобычно складывается из двух фаз (рис. 20):
- фаза 1 - быстрый вывод Yна начальный (черновой) уровень в течение времениt1;
- фаза 2 - точная настройка уровня Yв течение времениt2.
|
|
|
|
Рис. 21. Влияние коэффициента преобразования Ксистемы управления на длительность фазt1иt2и суммарное времяtРуправляющего воздействия | |
|
Рис. 20. Фазы управляющего воздействия водителя Y(t) на ступенчатое изменение заданного уровняY0(t) |


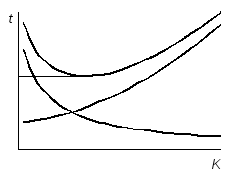
При увеличении коэффициента преобразования К(рис.) уменьшается времяt11-й фазы управляющего воздействия, а при снижении коэффициента преобразованияК- времяt2 2-й фазы. Суммарное времяtРс ростом коэффициента преобразованияКсначала снижается, достигает минимумаtР.MIN, а затем возрастает. Оптимальное значение коэффициентаКОПТвыбирают по минимуму суммарного времени регулированияtР.MIN.
Однако такой подход в ряде систем управления бывает недостаточен. Например, тормозное управление ТС используется в двух режимах:
1. Экстренное торможение, когда требуется с максимальной скоростью переместить педаль до упора. Для этого желательно сократить ход педали до минимума.
2. Служебное торможение, когда надо плавно снизить скорость, обеспечивая при этом комфортабельность и сохранность груза. Для этого лучше увеличить ход педали.
Компромисс - нелинейная статическая характеристика по ходу педали. В зоне низких замедлений (служебное торможение) обеспечивается больший ход педали, а в зоне экстренных торможений короткий ход.