

МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИИ
ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ УПРАВЛЕНИЯ
ИНСТИТУТ ИНФОРМАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ
Лабораторная работа № 3
По дисциплине
ПРОГНОЗИРОВАНИЕ СОЦИАЛЬНО-ЭКОНОМИЧЕСКОГО РАЗВИТИЯ
Студента: Голуба А.А.
Специальность: Математические методы и исследование операций в экономике
Курс: IV
Группа: I
Преподаватель: Писарева О.М.
Москва 2001
НАЧАЛЬНЫЕ ДАННЫЕ



ВОССТАНОВЛЕНИЕ ВЕСОВ ЧАСТНЫХ КРИТЕРИЕВ ОПТИМАЛЬНОСТИ ПО ПРИНЯТЫМ РЕШЕНИЯМ
В общем случае задача может быть представлена следующим образом:
 ,
где fk
– частные
критерии оптимальности, х – вектор-столбец
инструментальных переменных, А –
технологическая матрица, b
–
вектор-столбец ограничений ресурсов.
,
где fk
– частные
критерии оптимальности, х – вектор-столбец
инструментальных переменных, А –
технологическая матрица, b
–
вектор-столбец ограничений ресурсов.
Если считать, что fk – линейна, т.е. fk (х) = (ск)Тх, то исходная задача может быть представлена в следующем виде:
 ,
где к
– искомые веса частных критериев ск.
,
где к
– искомые веса частных критериев ск.
По условию Куна-Такера необходимые и достаточные условия достижения максимума функции в точке хopt имеют вид:
![]() ,
где
,
где
![]() -
градиент целевой функции по направлению
и
-
градиент целевой функции по направлению
и
![]() ,
,
![]() - i
– тая
нормаль для ограничений A*x
b и
- i
– тая
нормаль для ограничений A*x
b и
![]() ,
уi
– i-тая
двойственная оценка, vj
– неотрицательное число, е – единичная
компонента.
,
уi
– i-тая
двойственная оценка, vj
– неотрицательное число, е – единичная
компонента.
Таким образом, получаем следующую систему соотношений:

В результате могут быть получены следующие ситуации:
-
Решение единственно.
-
Множество решений.
3) Пустое множество.
ВОССТАНОВЛЕНИЕ ВЕСОВ ЧАСТНЫХ КРИТЕРИЕВ ПО ОДНОМУ НАБЛЮДЕНИЮ
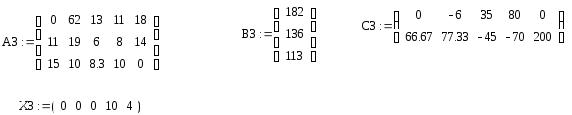
Исходные данные. 3-й период.


Рассматриваются 2 частных линейных критерия оптимальности, которым соответствуют вектора коэффициентов:
В![]() этих условиях был выбран план:
этих условиях был выбран план:
М![]() ножество
активных ограничений :
I={1,2}
ножество
активных ограничений :
I={1,2}
Множество активных ограничений : J={1,2,3}
В данном случае система уравнений записывается следующим образом:

Так как уi могут быть любого знака, то введем уi = уi+ - уi-. Запишем полученную систему в явном виде.
Для этого определили множество I(xopt), куда войдут ограничения типа А*хopt=b. Сама система будет записана следующим образом:
![]()
q1 + q2 + q3 + q4 + q5 min

Следует учесть, что в результате решения может быть получено множество решений для к. Условием не единственности полученного решения является наличие небазисной переменной, для которой оценочный коэффициент равен нулю, т.е. внесение этой переменной в базис не повлияет на значение целевой функции. В рассматриваемой системе предлагается использовать следующую логику рассуждений для определения иных базисных решений:
появление в решении небазисных переменных с равными нулю оценочными коэффициентами свидетельствует, как уже было описано выше, о наличии других решений системы;
признаками принадлежности исходного решения базисному (опорному плану) являются j , причем j = 0 – переменная базисная, j > 0 – переменная не базисная;
на основе выше сказанного, переход от одного базисного решения к другому предлагается осуществлять простым исключением (приравниванием нулю) какого-либо значения j из предлагаемой и системы, тем самым, включая соответствующий xj в базис; критерием включения того или иного хj в базис будет отсутствие в базисе искусственно введенных переменных qi , так как по условию они должны быть исключены из опорного плана (j в этом случае должно на себя оттягивать любое значение с qi), и, следовательно, включать соответствующую j - тую технологию в первоначальный оптимальный план нельзя.
Таким
образом, в результате проведенного
анализа может быть получено множество
такое, что
 ,
0
1.
,
0
1.
Используя предложенный способ анализа в пакете линейного программиования BLP 88, были получены следующие результаты:
Вектор имеет вид :
![]()