

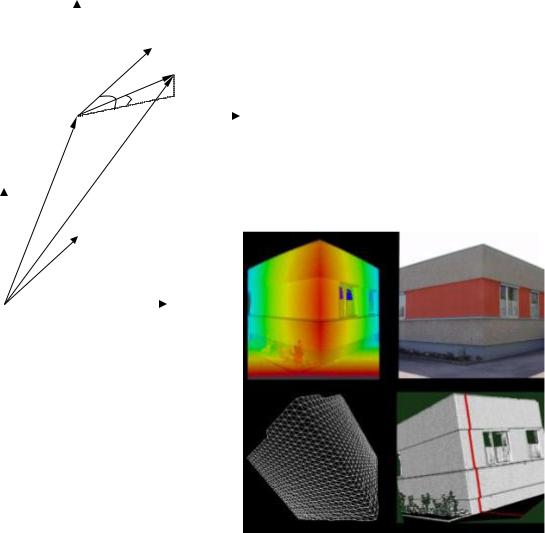
Совмещение облака точек и цифрового изображения объекта
|
|
|
|
R = RM – |
|
|||||
|
Rsi |
(2) |
|
|
|
|
||||
|
|
NAi r = RM – Rsi |
|
|||||||
|
|
(3) |
|
|
|
|
|
|
||
|
r A iT |
1 |
(R M R Si ) |
(4) |
||||||
|
N |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
1 |
|
X |
XSi |
(5) |
|
|
y |
AT |
|
|
Y Y |
|||||
|
|
|
||||||||
|
|
i |
|
N |
|
Si |
|
|||
|
|
|
|
|
|
Z |
|
|
||
|
f |
|
|
|
|
|
|
ZSi |
|
|
a11 |
X XSi a21 |
Y YSi a31 |
Z ZSi |
x f a13 |
X XSi a23 |
Y YSi a33 |
Z ZSi |
a12 |
X XSi a22 |
Y YSi a32 |
Z ZSi |
y f a13 |
X XSi a23 |
Y YSi a33 |
Z ZSi |
(6)
мулы связи системы координат сканера с системой координат съемочной к
|
|
Z’ |
|
|
Y’ |
||
|
|
|
|||||
|
|
|
|
|
|||
|
|
|
|
c |
|
Si |
|
|
|
|
|
φk ν i |
|
|
|
|
|
So |
|
k |
|
|
|
|
|
|
|
|
|
X’ |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Z’ |
RSo |
|
|
RSi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y’ |
|
|
|
S |
|
|
|
|
|
X’ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
RSi RSo ci |
|
||
XSi |
XSo |
cos k sin k |
||||
|
|
|
|
|
|
|
YSi |
YSo |
c cos k cos k |
||||
|
|
|
|
|
sin k |
|
ZSi |
ZSo |
|
|
|||
RSo , c- const
(7)
(8)

Мобильные сканерные системы

•Размещение сканерной системы на катере

Определение координат точек
объекта, по результатам съемки с помощью мобильной сканерной системы
RM RINS AINSrINS/ S AINSAINS/ S R

Примеры мобильного лазерного сканирования

Устройство и технические характеристики наземных лазерных сканеров
1 – Встроенная цифровая камера
2 – Зеркало 3 – экран и клавиатура для введения данных о съемке
4 – Гнездо USB для подключения внешнего устройства (компьютера)
5 – Гнездо для карточки расширения памяти SD
6 – Сервоприводы для горизонтального и вертикального вращения сканера 7 – Верхний каркас обеспечивающий горизонтальное вращение на 360о и вертикальный поворот зеркала на 70о 8 – Источник лазера
9 – Wifi для беспроводной передачи информации
10 – Цоколь для аккумулятора

Технические характеристики сканеров
|
|
Riegl |
|
|
Leica |
|
|
Trimbl |
Z+F |
Optech |
|
|
LMS- |
LMS- |
LMS- |
HD |
HD |
HD |
GS |
Imager |
Ilris |
|
|
Z210i |
Z360i |
Z420i |
2500 |
3000 |
4500 |
200 |
5003 |
3D |
Измеряемые |
расстояния |
|
|
|
|
|
|
|
|
|
(m) |
|
4 - 650 |
1 - 200 |
2 - 800 |
1.5 -100 |
1-100 |
1-53.5 |
350 |
1-25.2 |
800 |
Поле зрения: |
|
|
|
|
|
|
|
|
|
|
- горизонтальное |
360o |
360o |
360o |
40o |
360o |
360o |
360o |
360o |
40o |
|
- вертикальное |
80o |
90o |
80o |
40o |
270o |
310o |
60o |
310o |
40o |
|
Угловые интервалы |
0.01o |
0.01o |
0.004o |
0.0034о |
0.018о |
0.020о |
0.0018o |
0.01o |
|
|
Угловая точность |
0.005o |
0.002o |
0.002o |
0.0003 |
0.0034о |
0.01о |
0.0018o |
0.002o |
|
|
Линейная точность |
(для |
|
|
|
|
|
|
|
|
|
расстояния 50 m) |
15 mm |
6 mm |
5 mm |
4 mm |
4 mm |
3 mm |
3 mm |
3 mm |
3 mm |
|
|
|
|||||||||
Скорость |
сканирования |
|
|
|
|
|
|
|
|
|
(точек в секунду) |
10000 |
12000 |
12000 |
2000 |
1800 |
625000 |
5000 |
625000 |
2000 |
|
|
|
|||||||||

