

Методы алгоритмизации ч
.3.pdfПрактикум |
4. Задания для самостоятельной работы |
Каждая из последующих операций в процессе чеканки начинается по нажатию кнопки S5 «Single Step», если реализуются соответствующие логические условия. При работе в ручном режиме каждый клапан остается открытым в течение времени выполнения соответствующей технологической операции.
Если переключиться из автоматического режима в ручной во время выполнения операции, начатый процесс чеканки будет прерван, т. е. управление прекращается в текущем состоянии процесса. Процесс чеканки может быть продолжен в пошаговом режиме с помощью кнопки S5 «Single Step». Повторное нажатие кнопки S2 «man./auto.» переключает пресс в автоматический режим, и по завершении цикла чеканки пресс останавливается.
Задание
1.Закончить схему внешних соединений ПЛК, начертив не показанные на ней контакты.
2.Составить список назначений в соответствии с описанием работы.
3.Разработать управляющую программу для ПЛК.
4.Загрузить программу в ПЛК.
5.Протестировать разработанную программу на имитаторе ASIMA.
Исходные данные
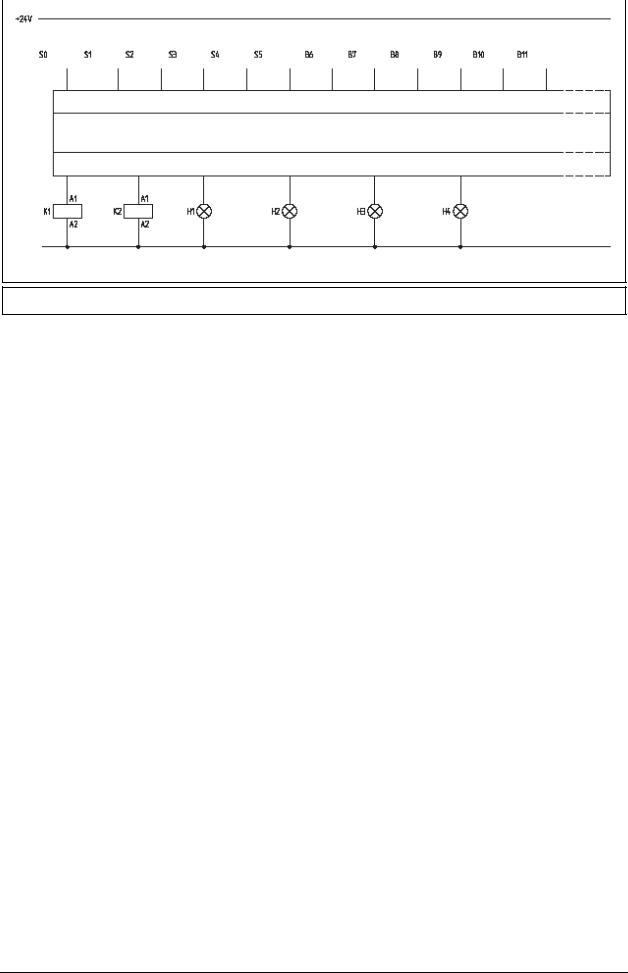
Схема внешних соединений ПЛК (рис. 4.6). На приведенной схеме не показаны ключи S0 – S5 и B1 – B6.
Примечание
Расположение входов и выходов контроллера на схеме не привязано к конкретной модели ПЛК.
+24 В
ПЛК
0 В
Рис. 4.6. Исходная схема внешних соединений ПЛК
4.3. Пешеходный переход со светофорным регулированием (маска М21)
Разработка программы для работы пешеходного светофора, управляемого программируемым логическим контроллером (рис. 4.7).
41
Практикум |
4. Задания для самостоятельной работы |
|
|
|
|
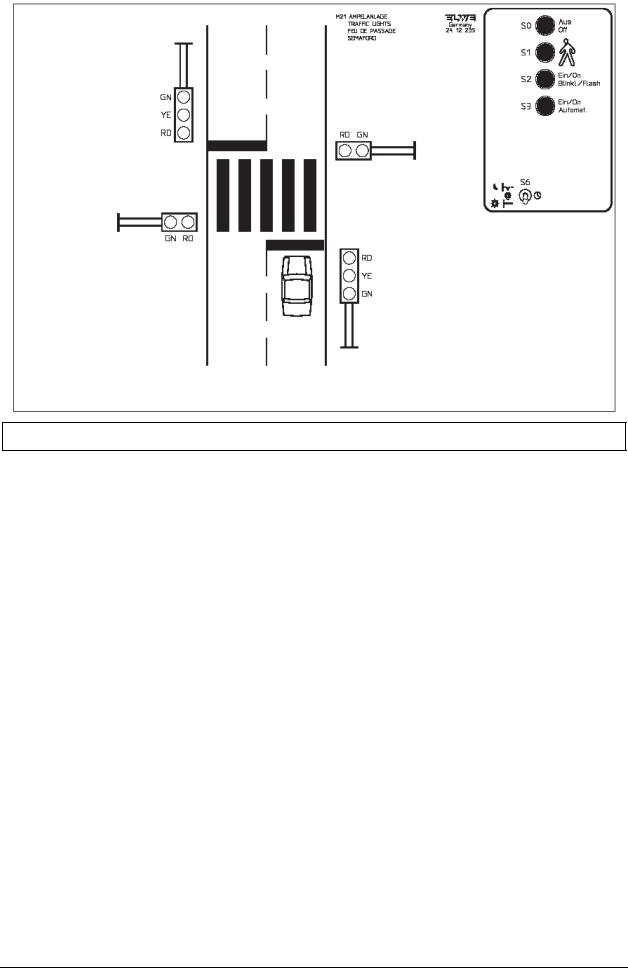
Рис. 4.7. Пешеходный переход со светофорным регулированием (маска M21)
Описание работы
Когда нажата кнопка S2, дорожные светофоры работают в режиме «мигающий желтый свет». Если в этом режиме нажать кнопку S3, происходит переход в автоматический режим и на обоих дорожных светофорах загорается красный свет. После некоторой задержки и кратковременного включения желтого света на дорожных светофорах загорается зеленый свет.
При нажатии пешеходом кнопки S1 зеленый свет на дорожных светофорах трижды мигает с частотой 1 Гц, после чего на короткое время загорается желтый свет. Затем на дорожных светофорах загорается красный свет на время, достаточное для перехода улицы пешеходом; на пешеходных светофорах в это время горит зеленый свет. Затем пешеходные светофоры мигают трижды с частотой 1,4 Гц и переключаются на красный свет, а на дорожных светофорах снова загорается зеленый свет.
В программе должна быть предусмотрена возможность отключения пешеходных светофоров нажатием кнопки S0.
Примечание
Контакт часов S6 используется для имитации функции часов.
Задание
1.Закончить схему внешних соединений ПЛК, начертив не показанные на ней контакты.
2.Составить список назначений в соответствии с описанием работы.
3.Разработать управляющую программу для ПЛК.
4.Загрузить программу в ПЛК.
5.Протестировать разработанную программу на имитаторе ASIMA.
42

Практикум |
4. Задания для самостоятельной работы |
Исходные данные
Схема внешних соединений ПЛК (рис. 4.8). На приведенной схеме не показаны ключи S0 – S3 и S6.
Примечание
Расположение входов и выходов контроллера на схеме не привязано к конкретной модели ПЛК.
+24 В
ПЛК
0 В
Рис. 4.8. Исходная схема внешних соединений ПЛК
4.4. Управление наполнением водонапорной башни (маска М40)
Разработка программы управления процессом наполнения водонапорной башни (рис. 4.9).
Описание работы
Вариант 1
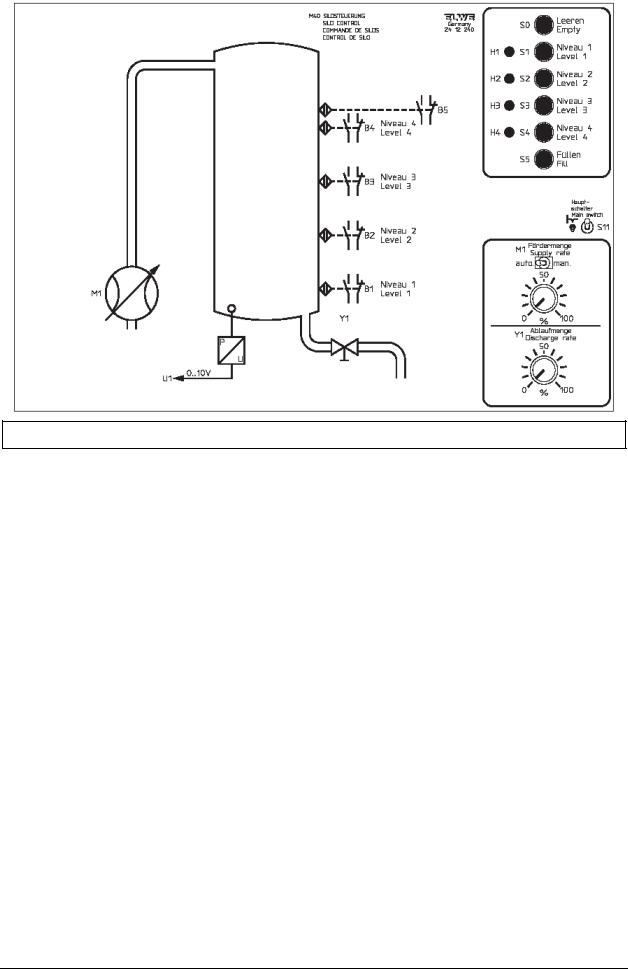
При нажатии кнопки S5 «Fill» цистерна наполняется водой с помощью насоса M1. При срабатывании датчика B5 (цистерна заполнена) процесс наполнения прекращается. Когда требуется слить воду, нажимают кнопку слива S0 «Empty». При этом открывается клапан Y1 и жидкость сливается из цистерны.
Система должна работать, только когда главный ключ S11 находится в положении «включено». Если скорость слива Y1 больше скорости наполнения M1, клапан Y1 должен быть автоматически закрыт по достижении уровня 1, т. е. при срабатывании датчика B1. Скорость слива Y1 и скорость наполнения M1 задаются потенциометрами.
Установки:
тумблер M1 – «man.» («ручной»);
потенциометр регулирования скорости наполнения M1 – произвольно (> 0); потенциометр регулирования скорости слива Y1 – произвольно (> 0).
Примечание
Когда имитатор ASIMA включен и индикатор уровня находится между двумя установленными значениями, он может быть погашен нажатием кнопки слива S0 после запуска программы.
Вариант 2
Алгоритм управления, соответствующий варианту 1, изменяется таким образом, что процесс наполнения башни прекращается по достижении уровня 4. Датчик B5 выполняет функцию блокировки, выключая насос M1 при неисправном датчике B4. При этом неисправность датчика B4 должна индицироваться миганием индикаторной лампы H4.
43
Практикум |
4. Задания для самостоятельной работы |
|
|
|
|
Рис. 4.9. Схема водонапорной башни (маска M40)
Вариант 3
В отличие от варианта 2, вариант 3 предусматривает возможность заполнения пустой емкости по нажатию кнопок S1 – S4 четырех различных уровней, определяемых датчиками B1 – B4. При этом выбранный уровень должен индицироваться одной из ламп H1 – H4. Если датчик выбранного уровня неисправен, насос M1 останавливается по достижении одного из следующих уровней, датчик которого исправен. При этом должна загореться лампа, индицирующая уровень останова насоса, в то время как неисправный датчик индицируется миганием соответствующей лампы.
Вариант 4
Необходимо обеспечить управление уровнем воды в цистерне, заполненной до одного из заранее установленных уровней, выбираемых нажатием кнопок S1, S2, S3 и S4. При этом действительное значение уровня воды представляется в виде аналогового сигнала (0 В → 0%, т. е. цистерна пуста, и 10 В → 100%, т. е. цистерна заполнена) на аналоговом выходе U1out имитатора ASIMA, который подается на аналоговый вход программируемого контроллера.
В зависимости от результата сравнения действительного значения уровня воды в цистерне с выбранным значением уровня, на аналоговом выходе контроллера появляется потенциальный сигнал (рабочий диапазон 0...10 В), который подается на вход U1in имитатора для изменения производительности насоса M1 с целью стабилизации уровня воды на заданном значении. Скорость отбора воды при этом задается потенциометром Y1 в поле управления на передней панели имитатора. В алгоритме должна быть предусмотрена ручная очистка индикатора уровня нажатием кноп-
ки S0.
Примечание
Тумблер M1 «auto./man.» на передней панели имитатора должен быть установлен в положение «auto.». Уровень воды в цистерне индицируется светящимся столбиком. Датчики с B1 по B5 автоматически срабатывают по достижении определенных уровней. Производительность насоса может изменяться потенциометром M1, а скорость слива – потенциометром Y1 в поле управления на передней панели имитатора.
44
Практикум |
4. Задания для самостоятельной работы |
Задание
1.Управление процессом наполнения между двумя уровнями.
1.1.Закончить схему внешних соединений ПЛК, начертив не показанные на ней кнопки и датчики.
1.2.Начертить граф переходов системы.
1.3.Составить список назначений в соответствии с описанием работы.
1.4.Разработать управляющую программу для ПЛК.
1.5.Загрузить программу в ПЛК.
1.6.Протестировать разработанную программу на имитаторе ASIMA.
2.Управление процессом наполнения между двумя уровнями с повышенной надежностью.
2.1.Изменить граф переходов.
2.2.Модифицировать управляющую программу управления в соответствии с описанием варианта 2.
2.3.Протестировать программу.
3.Управление процессом наполнения с выбором уровней.
3.1.Модифицировать управляющую программу в соответствии с описанием варианта 3.
3.2.Протестировать программу.
4.Управление процессом наполнения с регулированием уровня воды на заданном значении.
4.1.Модифицировать управляющую программу в соответствии с описанием варианта 4.
4.2.Протестировать программу.
Исходные данные
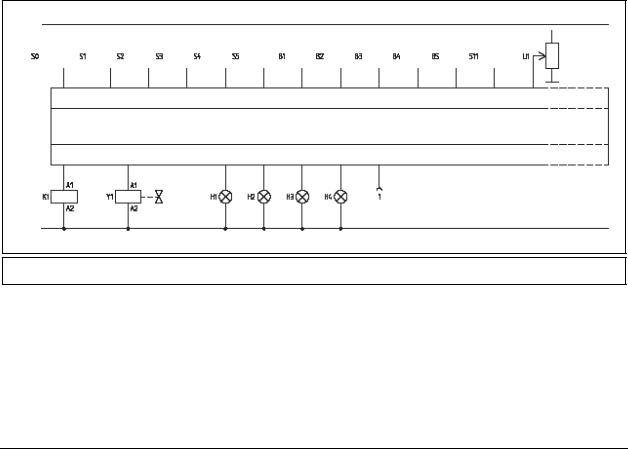
Схема внешних соединений ПЛК (рис. 4.10). На приведенной схеме не показаны ключи S0 – S5 и датчики B1 – B5.
Примечание
Расположение входов и выходов контроллера на схеме не привязано к конкретной модели ПЛК.
+24 В
10 В
ПЛК
0...10 В
0 В
Рис. 4.10. Исходная схема внешних соединений ПЛК
45
Практикум |
4. Задания для самостоятельной работы |
4.5. Грузовой лифт (маска М42)
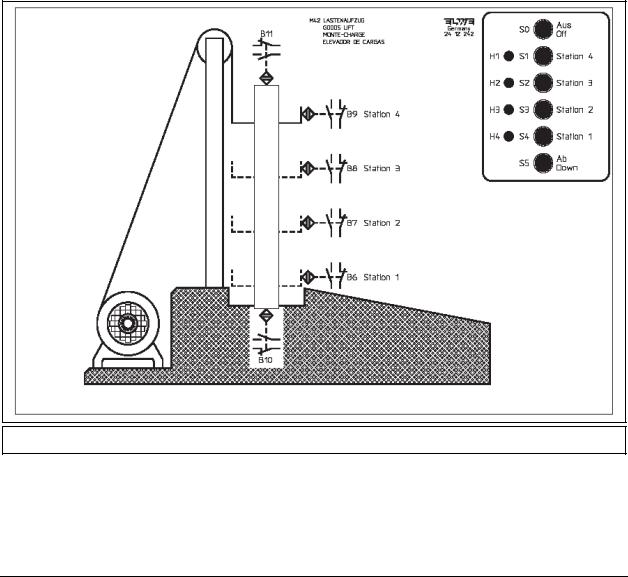
Разработка программы для управления работой грузового лифта (рис. 4.11).
Описание работы
Вариант 1
При нажатии одной из кнопок S1 – S4 платформа грузового лифта приходит в движение. По достижении выбранной станции привод автоматически отключается соответствующим путевым выключателем B6 – B9. Следующая станция может быть выбрана только после того, как платформа лифта вернется в исходное положение после нажатия на кнопку S5 «Down». При этом срабатывает конечный выключатель B10.
Независимо от положения и направления движения грузовой лифт может быть немедленно остановлен нажатием кнопки S0 «Off». После этого станция подъема может быть выбрана только при условии, что лифт вернулся в исходное положение в результате нажатия кнопки S5.
Конечный выключатель B11 используется для блокировки движения лифта в крайней точке подъема, если привод не отключился вследствие неисправности одного из датчиков B6 – B9.
Восстановление напряжения питания или подача резервного питания после отключения питания лифта должны действовать так же, как и нажатие кнопки аварийного отключения S0.
При нажатии одной из кнопок выбора станции S1 – S4 должна загораться соответствующая лампа H1 – H4. Лампа должна гореть до тех пор, пока платформа лифта не начнет движение вниз.
Рис. 4.11. Схема грузового лифта (маска 42)
Вариант 2
В отличие от варианта 1, в варианте 2 может быть выбрана любая станция назначения без возврата платформы лифта в исходное положение. При этом возможно движение платформы как вверх, так и вниз.
46

Практикум |
4. Задания для самостоятельной работы |
Каждый вызов индицируется непрерывным свечением индикаторной лампы той станции, кнопка вызова которой нажата. Когда платформа достигает выбранной станции, индикатор, соответствующий этой станции, начинает мигать с частотой примерно 1 Гц. При нажатии на кнопку вызова другой станции мигающий свет текущей станции выключается, платформа лифта начинает движение к следующей выбранной станции, лампа которой горит непрерывно.
При выходе из строя путевого выключателя станции назначения платформа лифта останавливается на следующей ближайшей станции, путевой выключатель которой исправен. При отказе всех путевых выключателей платформа должна остановиться либо в крайней точке подъема (при движении вверх), либо в крайней нижней точке (при движении вниз).
При нажатии кнопки аварийного отключения S0 движение грузового лифта немедленно прекращается. После этого может быть выбрано только движение платформы лифта вниз нажатием кнопки S5. При этом платформа останавливается на ближайшей по ходу движения станции.
Восстановление напряжения питания или подача резервного питания после отключения питания лифта должны действовать так же, как и нажатие кнопки аварийного отключения S0.
Примечание
Положение грузового лифта индицируется светящимся светодиодным столбиком. В зависимости от направления движения лифта светящийся сегмент «движется» вверх или вниз. Датчики автоматически активизируются соответствующим светящимся светодиодным сегментом.
Задание Вариант 1
1.1.Закончить схему внешних соединений ПЛК, начертив не показанные на ней кнопки и датчики.
1.2.Начертить граф переходов системы управления.
1.3.Составить список назначений в соответствии с описанием работы лифта.
1.4.Разработать управляющую программу для ПЛК.
1.5.Загрузить программу в ПЛК.
1.6.Протестировать разработанную программу на имитаторе ASIMA.
Вариант 2
2.1.Изменить граф переходов системы управления.
2.2.Модифицировать управляющую программу в соответствии с описанием варианта 2.
2.3.Протестировать программу.
Исходные данные
Схема внешних соединений ПЛК (рис. 4.12). На приведенной схеме не показаны ключи S0 – S5 и датчики B6 – B11.
Примечание
Расположение входов и выходов контроллера на схеме не привязано к конкретной модели ПЛК.
47
Практикум |
4. Задания для самостоятельной работы |
||
|
|
|
|
|
|
|
|
|
+24 В |
|
|
|
|
|
|
ПЛК
0 В
Вверх Вниз
Рис. 4.12. Исходная схема внешних соединений ПЛК
48

Практикум |
5. Решения заданий |
5.Решения заданий
Вданном разделе приводятся решения всех заданий, предложенных в разделе 4, ориентированные на использование программируемого логического контроллера следующего состава:
–модуль центрального процессора CPU S7-222;
–модуль расширения цифровых входов/выходов EM-223;
–модуль расширения аналоговых входов/выходов EM-235.
Программирование контроллера осуществляется с помощью пакета программирования STEP 7-Micro/WIN 32 (версия 3.2 SP4).
5.1.Автоматическое реверсивное включение электродвигателя с переключением «звезда/треугольник» (маска М6)
Вариант 1
Классический вариант переключения обмоток электродвигателя при его пуске. Задачу решают в следующем порядке.
Шаг 1. Определение режимов работы электродвигателя.
Для программирования ПЛК необходимо составить логические уравнения, связывающие между собой состояния его выходов, к которым подключаются контакторы, и условия реализации режимов работы электродвигателя.
Режимы работы электродвигателя:
1.Исходное состояние – ожидание.
2.Пуск двигателя (независимо от направления вращения вала) с переключением схемы его включения со звезды на треугольник. Режим пуска электродвигателя является кратковременным (его длительность обычно не превышает 5...10 с).
3.Вращение вала двигателя по часовой стрелке.
4.Вращение вала против часовой стрелки.
Реализация перечисленных режимов обеспечивается командными кнопками (S0 – S2), контактами блокировок и реле времени К5 и тепловым реле Q1, как показано на рис. 5.1.
49
Практикум |
5. Решения заданий |
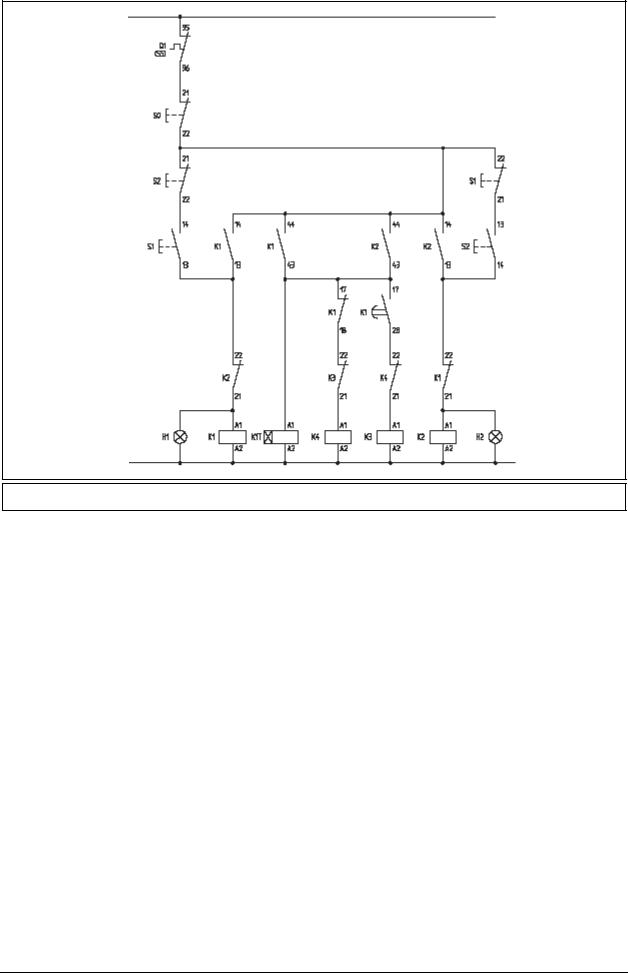
+24 В
0 В
Рис. 5.1. Принципиальная электрическая схема управления электродвигателем (вариант 1)
Здесь приняты следующие обозначения: S0 – кнопка выключения двигателя;
S1 – кнопка «Пуск» включения вращения по часовой стрелке; S2 – кнопка «Пуск» включения вращения против часовой стрелки; Q1 – контакты теплового реле;
К1 – контактор включения вращения по часовой стрелке; К2 – контактор включения вращения против часовой стрелки; К3 – контактор треугольника; К4 – контактор звезды; К5 – реле времени;
H1 – сигнальная лампа индикации вращения по часовой стрелке; H2 – сигнальная лампа индикации вращения против часовой стрелки.
Шаг 2. Построение схемы подключения контроллера.
При использовании программируемого логического контроллера для управления включением электродвигателя к входам ПЛК подключаются контакты командных кнопок S0 – S2 и контакты теплового реле Q1 (моделируемого в имитаторе ASIMA отдельной кнопкой S5), а к выходам ПЛК – обмотки контакторов K1 – K4 (реле времени реализуется программно в самом контроллере). Контакторы представляют собой электромагнитные реле с контактной системой, предназначенной для коммутации силовых цепей. То есть при программном управлении электродвигателем его обмотки непосредственно к выходам контроллера обычно не подключают.
Меры безопасности при использовании ПЛК должны предотвращать возникновение аварийной ситуации, например, при сбое в его работе. Поэтому в системе управления необходимо применять
50